
智能水面垃圾回收机设计
2022-04-24 09:11李新阳孟令昊李晓丹王一行
技术与市场 2022年4期
李新阳,孟令昊,李晓丹,王一行
(辽宁工业大学,辽宁 锦州 121001)
0 引言
伴随着现代化进程的飞速发展,生活垃圾逐渐增加,人们在追求自身利益的同时,水源污染的问题也日益严重。据统计,水中垃圾塑料类占31%、泡沫类占46%、木制品占16%[1]。对于这些垃圾,捕捞船捕捞垃圾效率高,但对于小型水域显得较为乏力,且成本较高,对捕捞人员有危险。因此,本文研究了一种智能水面垃圾回收机来解决问题。水面垃圾回收机能实现对小型水域漂浮垃圾的自动打捞、收集和储存工作。整个装置安装及使用方便快捷、投入成本低,在节省人力的同时,降低了捕捞船排放物的二次污染,因此具有很强的可行性和实用性。
1 智能水面垃圾回收机的机械结构设计
1.1 回收机的机械结构组成
垃圾回收机由机器人固定装置、推进系统和垃圾打捞机构组成。垃圾回收机的SolidWorks模型图如图1所示。
1.2 推进装置设计
水面垃圾回收机采用螺旋桨和叶轮2套推进系统组成双动力装置,使回收机能四周全方位移动。


1—打捞机构;2—回转机构;3—船体;4—推进机构;5—ROB防水桶;6—垃圾桶;7—固定杆。
螺旋桨提供驱动力,在水域环境较好的工作区域或需要快速推进时,使用螺旋桨驱动,能很好地保证动力,同时,叶轮在两侧辅助,保证动力的同时防止被水流扰乱前进方向。
需要转向时,在单片机的控制下,通过两侧叶轮的转速不同来进行转向。叶轮的设计使回收机在转向时与传统转向相比更加灵敏,转角更小,能实现原地掉头。推进装置示意图如图2所示[2]。
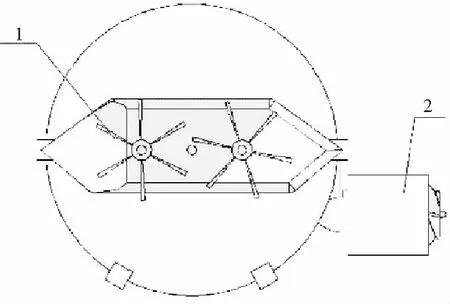
1—叶轮;2—螺旋桨。
1.3 打捞装置设计
垃圾打捞装置由行星轮系将内部与外部连接起来,其中连接杆、轴承、打捞斗和左右套板组成整个身体内部结构,如图3所示。打捞垃圾时,垃圾中常常混合许多水分,为了过滤垃圾中的这些水份,在捞斗斗身加上栅栏口。整个轮系设有3个行星轮,打捞斗固定在行星轮上轮流工作,合理运用空间,大大提高了打捞效率。

图3 打捞斗示意图
1.4 行星轮系设计
中心齿轮连接ROB密封舱,由内部电机提供动力,带动3个一级行星齿轮,一级齿轮的作用是使中心齿轮与二级齿轮的转向相同。故3个打捞斗只需要1个动力源,节省安装时间。且中心齿轮和二级行星轮齿数相等,使其传动比为1:1,在只有1个动力源的情况下能够控制3个二级行星轮的转速。保证打捞斗入水时的角度在可控范围内。行星轮系示意图及局部示意图如图4所示[3]。
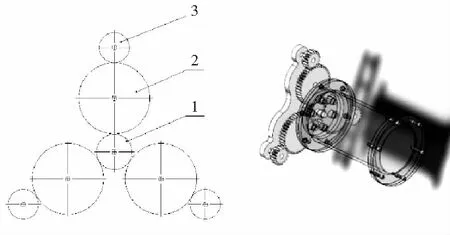
1—中心齿轮;2—一级行星轮;3—二级行星轮。
1.5 行星轮系传动比
通过传动比的计算,建立数学关系,可对垃圾回收机3个垃圾回收斗的位置进行确定,对行星轮的齿数进行确定,让其准确地将垃圾倒入垃圾桶,如图5所示。

图5 行星轮简图
自由度[4]:F=3n-2pL-pH
=3×3-2×3-2=1
其自由度为1
n3=0
当打捞斗入水时到扔完垃圾后再次入水时角度是一样的,使打捞动作连续,且不发生干涉。
1.6 翻转机构
打捞斗依靠重力与档杆共同作用使其翻转,因此打捞斗内部为阶梯状截面。在出水时杠杆平衡重力,使打捞斗保持水平。出水后,在上升过程中行星轮转动,使打捞斗挡杆推力方向改变,从而发生翻转。接着,捞斗重心越过行星轮中线,继续向前翻转。在水下前进,进行下一次打捞,如图6所示。

图6 翻转机构示意图
2 智能水面垃圾回收机的控制系统设计
2.1 单片机的选择
STM32单片机与传统51单片机相比具有更多的优势,后者保护能力很差,很容易烧坏芯片,速度也不如STM32单片机。并且STM32单片机程序技术较为成熟,接口相对简单,不需要太多的外围元件,其所在公司资源也更丰富。STM32单片机具有实时性、数字信号处理、低功耗、高集成度的特点,所以选用STM32单片机进行控制。
2.2 智能水面垃圾回收机控制流程
智能水面垃圾回收机的3个动作是通过STM32单片机控制2个推进器、2个叶轮电机和一级行星轮完成的。
工作时,M2006电机通过连接杆带动一级行星齿轮转动,一级齿轮带动3个垃圾捞斗组件上的二级行星齿轮绕中心轴旋转,同时控制捞斗运动。实现捞斗在水下运动7 d,将垃圾扣入垃圾桶。移动到前方水域后,第二个打捞斗刚好降到水面以下,重复第一个打捞斗的运动,3个装置如此往复,提高工作效率。打捞斗将垃圾上升出水面后,由槽轮控制打捞斗翻转,将垃圾扣入垃圾桶。控制系统原理如图7所示。
螺旋桨采用水下电动推进器,外观呈流线型,能更好地减小阻力。

图7 控制系统原理图
2.3 能源装置
能源装置由太阳能板连接蓄电池,将太阳能转化为化学能,再转化为电能,为回收机提供能源,符合设计时环保的理念。能源装置示意图如图8所示。

图8 能源装置示意图
3 结语
本文研究的水面垃圾回收机,通过SolidWorks软件干涉检查结果为0,运动算例分析得出结构设计合理可行。
2组推进机构以及3组打捞机构,使其保证灵活稳定的同时能提高工作效率。该装置可以清理水面上漂浮的垃圾,对于河流、湖泊、公园小湖等小型水域的环境治理有很大的作用,与现有的传统捕捞船相比,节省人力、物力,因此具有很强的可行性和实用性。整个装置投入成本低,结构原理简单,安装及使用方便快捷,具有较大的市场应用价值。
猜你喜欢
今日农业(2020年16期)2020-12-14
数学小灵通(1-2年级)(2020年9期)2020-10-27
环球时报(2020-03-30)2020-03-30
当代贵州(2019年41期)2019-12-13
制造技术与机床(2017年7期)2018-01-19
农机化研究(2017年3期)2017-12-16
陶瓷学报(2015年4期)2015-12-17
中国共青团(2015年7期)2015-12-17
销售与市场·管理版(2014年8期)2014-09-15
汽车电器(2014年8期)2014-02-28
