基于激光点云的输电线路杆塔倾斜检测算法
2022-04-25 07:14徐梁刚陈凤翔王时春
激光技术 2022年3期
徐梁刚,时 磊,陈凤翔,王时春,龙 新,王 迪
(1.贵州电网有限责任公司 输电运行检修分公司,贵阳 550002;2.中国电建集团 贵州电力设计研究院有限公司,贵阳 550081)
引 言
杆塔是承载输电线路安全运行的重要基础设施,受杆塔基础开裂、滑动、沉降以及导线应力不均衡的影响,杆塔易发生变形与倾斜。杆塔的倾斜现象将导致导线应力以及电气设备安全距离的改变,情况严重时电网将发生跳闸、断线以及倒塔等安全事故,造成巨大的经济损失和安全威胁。在输电线路运行维护工作中,如何解决杆塔倾斜问题,及时而准确的检测一直是运维工作人员的关注重点。现行的解决方案有两种:一是人工巡检方式,通过人工携带测量仪器的方式进行实地测量,作业繁琐,工作量大;二是在线监测方式,通过在杆塔上加装监测装置的方式,实现了对杆塔倾斜的实时检测,但是需要在每一阶杆塔上安装监测设备,设备成本高,同时监测设备的供电、通讯以及维护也是电网运维的工作难点。
随着激光雷达(light detection and ranging,LiDAR)技术在输电线路运维领域的不断深化应用,机载LiDAR巡检成为了输电线路巡检周期性的工作。目前已有大量学者开展点云数据在电力应用方面的算法研究[1-13],但基于点云数据进行判定杆塔倾斜度的研究较少。2016年,CHEN利用塔身四棱台的结构特征,将塔身点云投影到垂直于水准面的各个方向上,使用凸壳算法对杆塔侧棱点进行提取,进而实现机载LiDAR杆塔点云的倾斜检测,但该算法将杆塔点云中最低点以上2m~15m之间的点云视为塔身点云,无法自适应过滤高低腿以及塔头的影响,算法鲁棒性较差[14]。2017年,SHEN提出了基于地面3维激光雷达实现输电线路杆塔倾斜度测量的新方法,搭建了试验系统,证明了点云数据进行杆塔倾斜测量的可行性,但该方法需要手动确定塔角点,未实现自动检测[15]。
为解决目前基于LiDAR点云杆塔倾斜检测方法鲁棒性低、自动化程度差等问题,本文中利用杆塔塔身结构呈标准四棱台的特点,提出一种基于杆塔塔身分层投影提取中轴点的激光点云杆塔倾斜检测算法,利用杆塔分层点云计算最小外接矩形,提取杆塔中轴点,通过空间直线拟合算法确定杆塔中轴线来进行杆塔倾斜度检测。首先,将杆塔点云沿高程方向进行分层,求取分层点云的最小外接矩形,确定外接矩形中心为杆塔中轴点;其次,在中轴点偏移的检测与剔除中,一是利用外接矩形的面积、比例变化来过滤塔头、高低腿等外接矩形中点与实际中轴点偏移的分层点云,二是利用外接矩形四边内切点高程值剔除存在缺点、噪点的分层点云,在杆塔中轴线拟合之前剔除可检测的偏移点;最后,在杆塔中轴线拟合阶段引入抗差估计,通过选权迭代的方式抑制其余偏移点对杆塔中轴线拟合的影响。实验结果证明,本方法利用机载激光LiDAR点云数据进行杆塔倾斜检测具有较强的鲁棒性,与全站仪实测结果残差最大不超过0.90‰。
1 基于杆塔塔身分层投影提取中轴点的输电线路杆塔倾斜检测方法
1.1 杆塔点云结构分析
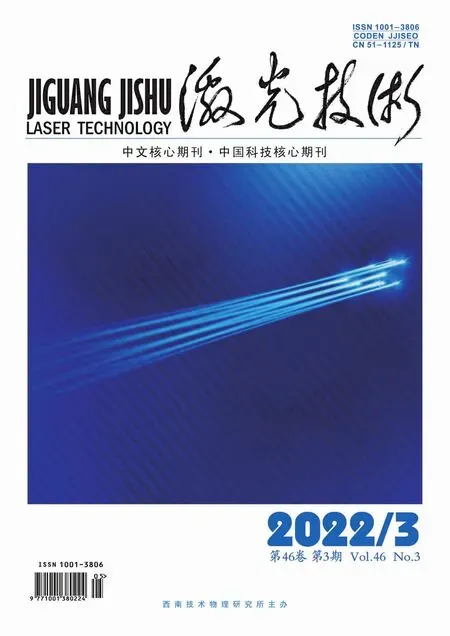
杆塔塔形是影响点云数据进行杆塔倾斜检测的主要因素,输电线路杆塔按形状可分为干字塔、酒杯型以及鼓型塔等多种类型。为了增强本文中算法的普遍适用性,在考虑杆塔塔形因素的基础上,进一步考虑点云密度、杆塔高低腿两种因素,列举以下3种杆塔点云实例进行杆塔结构分析,如图1所示。
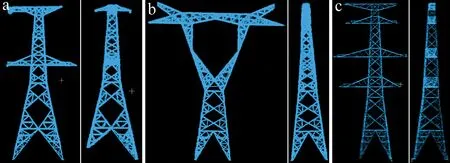
Fig.1 Structure diagram of representative tower point cloud
杆塔整体可分为塔头、塔身、塔脚三部分,由图1可以看出,各类型杆塔塔身部分统一表现为四棱塔结构,其中轴线与杆塔整体的中轴线重合,而塔头、塔脚部分由于横担、高低脚的存在,其空间结构并不严格对称。图2为上述杆塔塔脚、塔身、塔头部分沿高程方向上分层俯瞰图,分层厚度为1m。
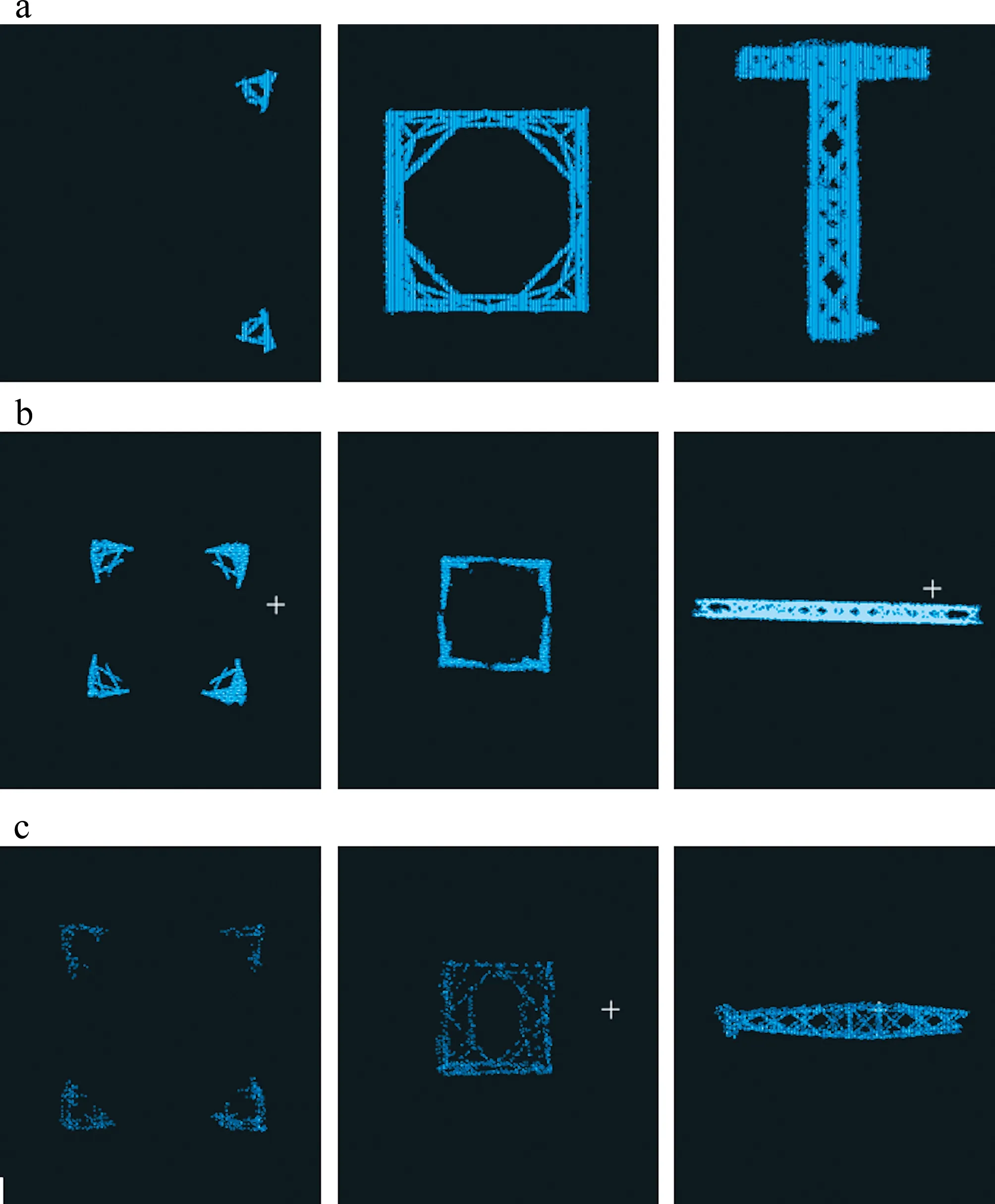
Fig.2 Hierarchical aerial view of representative tower point cloud
从图2可知,无论点云的稠密程度,塔脚(除开高低脚部分)、塔身部分点云结构都符合严格对称结构。本文中对塔脚(除开高低脚部分)、塔身部分的分层点云取最小外接矩形,结果如图3所示。
Fig.3 Minimum circumscribed rectangle diagram of stratified point cloud of representative tower
从图3可以看出,塔身部分的分层点云的最小外界外接矩形的4个顶点位于杆塔侧棱上,矩形中心点位于杆塔中轴线上。
综上所述,杆塔点云具有以下3个特征:(1)塔身分层点云严格对称结构,外接矩形大致呈正方形分布,而高低腿符合线或点分布;(2)塔身分层点云最小外接矩形面积从下至上不断变小;(3)塔身分层点云外接矩形中点为杆塔中轴点。
1.2 基于分层最小外接矩形的杆塔中轴点提取
根据杆塔点云的分层特征,本文中提出一种通过求解杆塔分层点云在xOy平面上投影的最小外接矩形确定杆塔中轴点的中轴点提取算法,详细步骤如下。
(1)杆塔点云分层。提取杆塔点云最低点高程值hmin,按步长k=1m,以hmin为起点沿高程方向从下至上将杆塔点云按层分割,得到分层点云集合{Φ1,Φ2,…,Φn},其中n为首次分层的杆塔分层总层数。
(2)计算最小外接矩形[16]。求解点云Φi在xOy平面投影后平面点集的最小外接矩形Ri,其顶点为(Pi,1,Pi,2,Pi,3,Pi,4),长宽面积分别为Li,Wi,Si。
(3)提取塔身点云。由于高低腿与塔头、塔身不同,其分层点云最小外接矩形中心不一定在杆塔中轴线上,本文中利用塔身分层点云最小外接矩形面积从上到下递增,且基本呈正方形的特征,通过外接矩形的长宽比以及面积变化来剔除杆塔高低腿与塔头的分层点云。令i=1,对分层点云Φi进行塔身检验,判断条件为:

(1)



1.3 基于抗差估计的杆塔中轴线拟合
上面虽然在提取中轴点的过程中对提取中轴点偏离杆塔实际中轴线的情况进行了过滤,但部分误差仍然不可避免,不能确保提取的中轴点点集全部符合实际中轴线分布。因此,本文中采用抗差估计理论,通过选权迭代的方式,在杆塔中轴线拟合过程中自适应降低中轴点点集中偏移点在中轴线拟合中的权重,达到抑制剩余偏移点对中轴线拟合影响的目的[17-18]。
将杆塔中轴线方程分解为xOz和yOz两平面的投影直线方程,如下所示:

(2)
式中,a1,a2和b1,b2分别为xOz和yOz平面杆塔中轴线投影直线参数。设杆塔中轴点集为Pset{P1,c,P2,c,…,Pq,c},其中q为中轴点集的点数,则杆塔中轴线方程系数矩阵、权阵以及残差矩阵如下:
(3)

v=BX-L
(4)
常规最小二乘拟合是求解残差阵v在vTPv最小情况下的最优解,当偏移点混入点集Pset中时,最小二乘拟合结果将偏离真值。抗差估计在迭代计算过程中对残差值v进行粗差检验,降低粗差观测值的权重,在点集Pset存在部分偏移点的情况下仍然能保证拟合结果稳健可靠。本文中使用的权因子公式如下所示[19-20]:
(5)

基于抗差估计理论的杆塔中轴线拟合具体流程如下。
(1)开始迭代计算,令迭代次数l=1,计算参数矩阵与残差矩阵如下:
(6)
(2)计算单位权与残差中误差,计算公式见下:

(7)
式中,r为自由度。
(3)通过权因子公式计算权因子矩阵[ω1ω2…ω2k],调整权阵P[j,j]←P[j,j]ωj。
(4)令l=l+1,重复步骤(1),重新计算矩阵X(l)和v(l)。
(5)重复步骤(2)~步骤(4),直至满足以下迭代条件,方结束拟合过程,X(l)为拟合结果。
‖X(l)-X(l-1)‖<ε
(8)

2 实验分析
2.1 算法鲁棒性实验
为验证本文中提出的输电线路杆塔倾斜检测方法鲁棒性,从塔型与点云密度、杆塔存在噪点与缺点两种情况进行鲁棒性论证。
2.1.1 塔型与点云密度鲁棒性实验 在实际激光LiDAR巡线中,由于飞行搭载平台、飞行高度以及使用LiDAR设备的差异性,输电线路通道点云的密度并不一致,同时架空输电线路现存的杆塔样式各异,形态特征不一,为基于激光点云的杆塔倾斜检测中轴点确定造成极大困难。因此,本文中选取了主网具有代表性的3种杆塔类型,并同时考虑高低脚、点云密度因素的影响,设计了以下3种方案,对塔型不同与点云密度各异情况下验证基于最小外接矩形中轴点算法的鲁棒性。
(1)方案一。塔型:干字塔;点云密度:高;有高低腿;(2)方案二。塔型:酒杯塔;点云密度:高;无高低腿;(3)方案三。塔型:鼓型塔;点云密度:底;无高低腿。图4~图6中各矩形顶点的高程值设置为四边顶点高程均值。

Fig.4 Axis point extraction in scheme 1
由图4~图6可以看出,本文中提出的基于分层最小外接矩形的杆塔中轴点计算方法,针对主网几种具有代表性的塔型,在各种点云密度下能够正确提取塔身点云,自适应过滤高低脚、塔头部分点云对中轴点计算的影响;通过分层点云最小外接矩形确定杆塔中轴点的方式,能够在点云不存在噪点、缺点的情况下正确计算杆塔中轴点。

Fig.5 Axis point extraction in scheme 2

Fig.6 Axis point extraction in scheme 3
2.1.2 点云缺点与噪点鲁棒性实验 激光LiDAR数据采集时由于飞行路线、环境因素的影响,输电线路杆塔激光点云不可避免存在噪点、缺点情况。针对杆塔点云存在噪点、缺点情况采取了以下3个措施:第一,针对点云缺点引起的缺角情况,最小外接矩形计算正确仅需分层点云的3个四棱顶点存在,杆塔任意一角缺失不影响算法计算结果的正确性;第二,针对点云存在噪点、缺点导致最小外接矩形倾斜情况,增加矩形四边内切点高程验证加以控制过滤;第三,针对其余因点云存在噪点、缺点导致杆塔中轴点偏移情况,通过中轴线拟合中增加抗差估计,抑制偏移点在直线拟合中的影响。下面分别对以上3种措施进行实验分析。
(1)杆塔角缺。利用干字塔(高密度、高低腿)点云,人工进行点云切角处理,对缺角情况下杆塔中轴线提取进行模拟分析,分层最小外接矩形以及中轴点计算结果如图7所示。
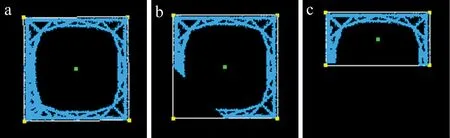
Fig.7 Experimental results of missing angle of tower
杆塔缺角是由于塔身自身遮挡引起的,搭载在飞行平台进行点云数据采集时,仅可能存在一个塔角在盲区内,杆塔点云同时存在两个角缺失的情况较少。由图7可以看出,在缺一角情况下并不影响分层最小外接矩形进行杆塔中轴点提取,在缺两角情况下杆塔中轴点才会引起较大偏差,因此本算法在杆塔存在缺角情况下具有较强的鲁棒性。图8是缺一角情况下中轴点整体提取效果。

Fig.8 Overall effect of the experiment of missing angle of tower
(2)分层最小外接矩形倾斜。利用干字塔(高密度、高低腿)点云某一分层点云,人工进行增加噪点、删点处理,对点云存在噪点、缺点情况下外接分层最小外接矩形倾斜情况进行模拟,为了便于直观展示矩形倾斜的效果,将错误内切点的高程值作为其对应边端点高程值。
从图9~图11中可以看出,由于点云存在噪点和缺点情况,最小外接矩形与点集的内切点发生变化,当错误的内切点高程值与其余内切点不同时,导致分层最小外接发生倾斜,矩形中心点偏离杆塔中轴点。换言之,当分层最小外接倾斜时,该层点云必然存在点云噪点和缺点情况,并且影响了最小外接矩形的计算,导致了计算出的中轴点与实际发生偏移。从侧视图可以看出,利用矩形四边与点集的内切点高程值进行高程一致性检验,能够有效识别出外接矩形是否存在倾斜情况,在杆塔中轴线拟合之前剔除可检测的偏移点。
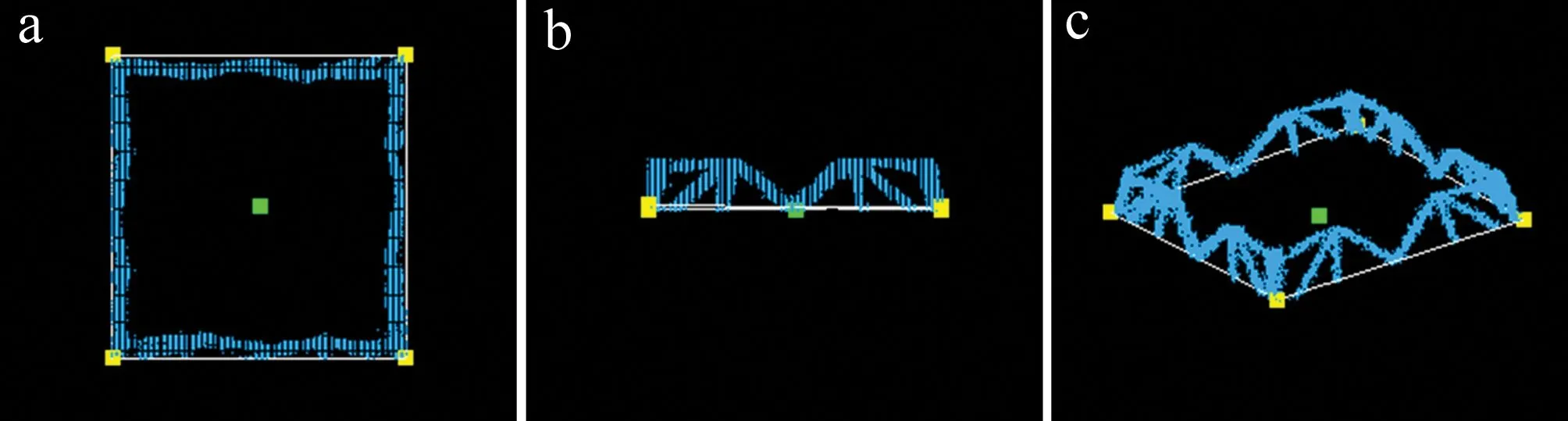
Fig.9 Results of rectangle tilt test under normal conditions

Fig.10 Experimental results of rectangle tilt under noisy conditions

Fig.11 Experimental results of rectangular tilt in the case of defects
(3)部分提取中轴点偏移。尽管本文中提出算法利用对最小外接矩形倾斜判断过滤了大部分偏移点,但仍存在少数极端情况无法避免。如图12所示,噪点明显影响了分层最小外接矩形的计算,但由于噪点本身高程值与其余内切点一致,利用高程差值无法对是否存在噪点进行判断过滤。因此,在杆塔中轴线拟合中引入抗差估计以抑制离群点在直线拟合中的影响,为验证抗差估计在杆塔中轴线拟合中抵抗偏移点影响的效果,选取一组杆塔中轴点,设计以下方案:方案一,选取一组同时存在可检测偏移点以及不可检测偏移点的杆塔中轴点;方案二,在方案一的基础上进行倾斜检测,过滤可检测偏移点;方案三,在方案二的基础上通过人工判断,过滤所有偏移点。上述3种方案中轴点同时进行最小二乘拟合与抗差估计拟合,结果如图13所示。
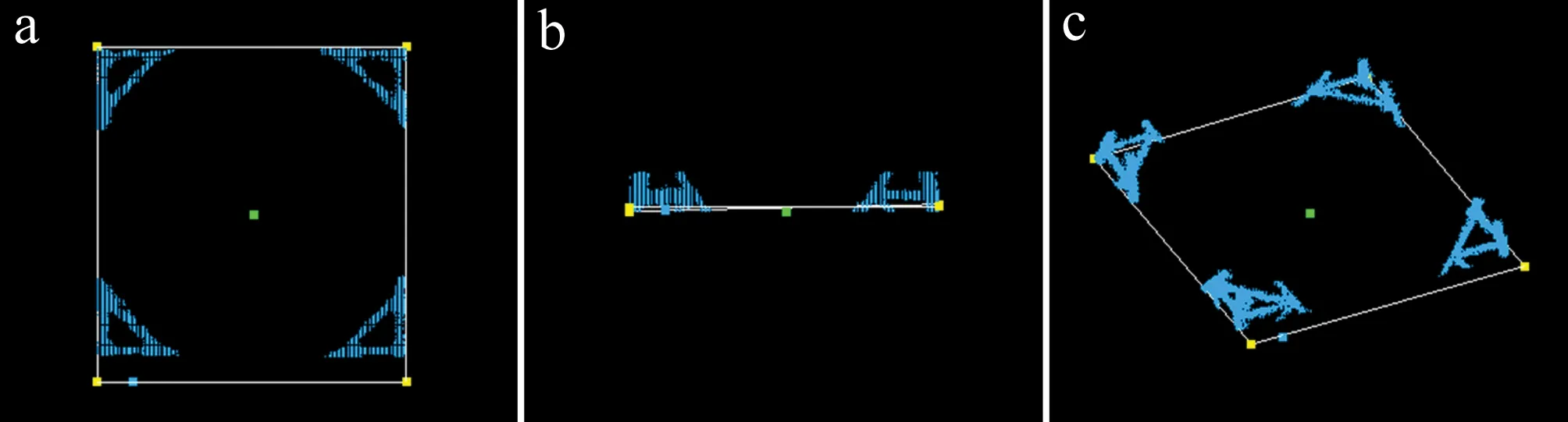
Fig.12 Schematic diagram of a few minimum circumscribed rectangles unable to detect center point offset
图13中,方点代表正确中轴点,圆空心点代表可使用倾斜矩形验证过滤的偏移点,圆实心点为剩余偏移点,实线为抗差估计结果,虚线为最小二乘结果。为直观展示最小二乘与抗差估计拟合效果的差异,图13中采用侧斜方视角。由图13可以看出,在不存在偏移点的情况下最小二乘拟合与抗差估计拟合均能得到正确结果,但随着偏移点增加,最小二乘拟合易受偏移点的影响偏离正确值,而抗差估计在正确点占大比例时,能够有效抑制离群偏移点在直线拟合中的影响,保持拟合结果的正确性。

Fig.13 Fitting results of three schemes under least squares and robust estimation
因此,利用分层最小外接矩形内切点高程差值在直线拟合前对大多数可检测偏移点进行过滤,保证正确中轴点在整个中轴点集中占大比例,再利用抗差估计对剩余偏移点进行抑制,在存在噪点与缺点情况下尽可能提高杆塔倾斜检测结果的正确性。
2.2 实测对比实验
为验证本文中提出的杆塔倾斜算法的实用性,利用全站仪实测了贵州某一220kV线路连续20级杆塔的倾斜度,并采用AS-300HL多平台激光雷达系统对此20级杆塔进行点云数据采集,平面精度5cm,高程精度5cm。表1为对比结果。
本文中采用高精度检验方法,将观测精度更高的全站仪测量值视为杆塔倾斜真值,对凸壳算法以及本文中算法残差值进行统计分析,从表1中可以看出,本文中提出算法检测倾斜值更为接近真值,最大偏差为0.90‰,而凸壳算法最大偏差为2.27‰,因此本文中提出算法检测具有更强的实用性。

Table 1 Results of measured comparison
3 结 论
本文中提出了一种基于杆塔塔身分层投影提取中轴点的输电线路杆塔倾斜检测方法,为利用输电线路机载激光LiDAR数据实现杆塔倾斜检测提供了一种新算法。
(1)提出了基于分层最小外接矩形的杆塔中轴点提取方法,针对不同塔型,在各种点云密度下能够正确提取塔身点云,自适应过滤高低脚、塔头部分点云对中轴点计算的影响,能够在点云不存在噪点、缺点的情况下正确计算杆塔中轴点。
(2)针对杆塔点云缺点与噪点,利用分层最小外接矩形内切点高程差值在直线拟合前对大多数可检测偏移点进行过滤,保证正确中轴点在整个中轴点集中占大比例,再利用抗差估计对剩余偏移点进行抑制,能够在点云存在噪点与缺点情况下尽可能保证杆塔倾斜检测结果的正确性。
(3)经实测对比,本文中提出的杆塔倾斜检测方法误差在0.90‰以内,基本满足实际应用需求,具有重要的实际意义。同时,本文中提出的杆塔倾斜检测精度取决于点云精度,随着机载激光雷达技术的进一步发展,点云密度以及精度进一步提高,本文中提出方法对杆塔倾斜的敏感度将进一步提高。
猜你喜欢
港口装卸(2022年4期)2022-08-31
金桥(2022年7期)2022-07-22
房地产导刊(2021年11期)2021-11-27
房地产导刊(2021年11期)2021-11-27
疯狂英语·新读写(2021年11期)2021-11-24
摄影之友(影像视觉)(2020年4期)2021-01-09
房地产导刊(2020年7期)2020-08-24
孩子(2020年8期)2020-08-13
影像视觉(2020年4期)2020-05-09
制导与引信(2017年3期)2017-11-02