汤勺自动分拣机器人系统设计研究
2022-05-02 13:06祁剑峰
农业装备技术 2022年2期
祁剑峰
(百特(福建)智能装备科技有限公司,福建 三明 35300)
0 引 言
目前,我国一次性成套消毒餐具再回收包装生产线,主要包括餐具的清洗、烘干、分拣、组装及包装等工艺。其中,清洗、烘干、包装已实现自动化,而分拣、组装仍由人工完成[1]。存在工人劳动强度大、生产效率低、餐具易被二次污染等一系列问题,无法满足市场需求。目前,国内尚无关于餐具分拣、整理、组装和包装等多功能集成的全自动化生产线投入使用的报道。
随着现代工业生产用工成本快速增加和响应国家对工业自动化升级的号召,自动化生产线越来越多地应用到各类生产行业中。针对消毒餐具行业来说,因其自动化程度低和市场准入门槛低等问题,低效的人工作坊式的消毒餐具包装生产线因卫生问题引起消费者的诟病和相关职能部门的关注,自动化消毒餐具生产线具有广阔的市场应用前景。汤勺作为消毒餐具中必备的单品之一,汤勺的形状与其他对称的餐具单品例如半球状碗类、扁平状盘子类、圆柱状杯子类均不同,汤勺为不规则餐具。
1 汤勺分拣机构系统组成与工作原理
1.1 系统组成
本系统针对平底小汤勺设计,具体形状如图1所示,汤勺的稳定姿态为两种,汤勺的盛物口朝上或者朝下的姿态。
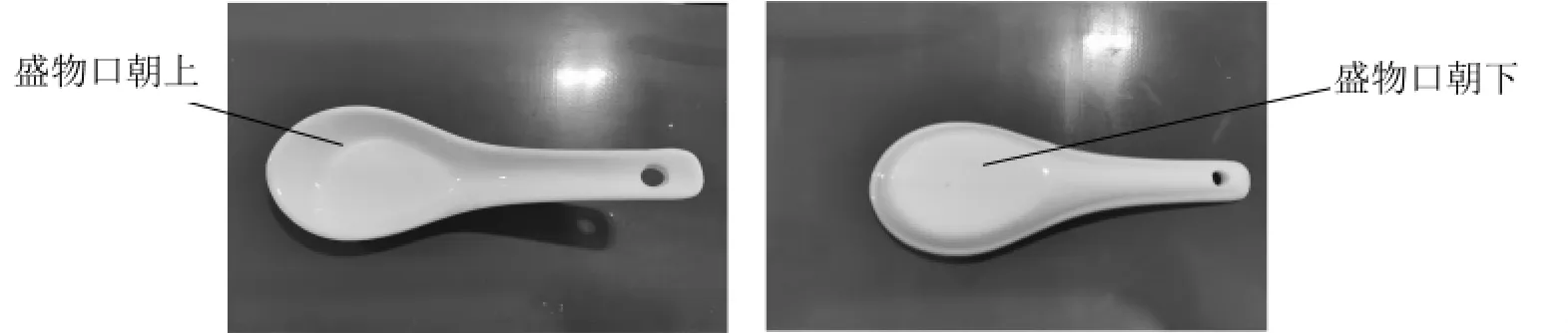
图1 汤勺俯视姿态
现有的餐具清洗干燥工序一般将所有种类的餐具单品(筷子除外)集中处理,不预先按照餐具种类进行分类处理,只有极少数消毒餐具包装线在清洗前进行分类处理。所以对于干燥后的消毒餐具,第一步是从餐具中筛选出汤勺,如图2 所示,汤勺分拣机构系统包括输送装置、筛选装置、机器视觉系统、工业机器人、翻转机构和控制系统等6 个子系统。机器视觉子系统的硬件部分由智能相机、镜头、光源、相机支架等组成。工业机器人子系统由机器人本体、机器人控制器、示教盒及末端执行器等部分组成,末端执行器需要根据汤勺进行专门设计与制造。翻转机构子系统针对汤勺进行专门设计与制造。控制子系统由系统控制柜、HMI 人机界面及分布在系统中的各传感器、电磁阀等低压电器组成,其中,系统控制柜以PLC 为核心来构建[2]。

图2 汤勺分拣机构系统组成
1.2 系统工作原理
汤勺自动分拣机器人系统是通过各子系统相互配合来完成分拣作业的。首先,输送装置贯穿整个分拣系统,输送装置用于带动汤勺依次经过各自子系统,输送装置设置成多段宽度不同的输送线以调节输送节拍,汤勺筛选装置[3]从餐具中筛选汤勺,机器视觉子系统采集输送装置上汤勺图像,在线采集图像,利用二次开发的图像处理程序对图像进行处理,得到汤勺定位坐标信息和姿态信息,完成汤勺的识别定位和姿态识别,然后,PLC 与工业机器人通信,工业机器人根据接收到的定位坐标信息及即定的路径,通过末端执行器完成汤勺的拾取,随后末端执行器根据视觉检测系统传递的姿态信息将汤勺放置到翻转机构上或者直接放置到输送装置上,翻转机构对汤勺进行翻转后放置到输送装置上。最后,工业机器人各活动臂及末端执行器各气缸回到原点位置,进入下一个工作循环。同时,系统设计有实时监控系统,在汤勺分拣出现异常时进行相应的操作;系统工作原理如图3 所示。

图3 系统工作原理
2 汤勺分拣系统结构设计
2.1 汤勺筛选装置的设计
汤勺与其他餐具的区别在于:汤勺为长条状且沿其长度方向的横截面面积最小。基于过滤筛选的原理将汤勺从餐具中分离出来。汤勺筛选装置包括滚筒输送线组装,滚筒输送线的前后两端滚筒均开有多个间隔均匀的凹槽,多组圆皮带平行设置且其两端分别嵌套在前后两端滚筒的凹槽中,圆皮带将滚筒分隔成多个相同的漏孔,漏孔的长边略大于汤勺沿其长度方向的最大宽度。因为汤勺的最大宽度明显小于其他规则餐具的口径,从而其他规则餐具不会从该段漏孔漏下。漏孔的形状近似为正方形,勺子能够以多种姿态从漏孔顺利落下,能够有效减少汤勺在漏孔处卡料。
2.2 视觉系统及勺子的位置和姿态识别
选取输送装置的正上方为拍摄位置,即拍摄输送带上俯视视角的汤勺照片,拍照采集的原始图像具备较多信息。为了获得稳定的结果,视觉系统还需对图像进行必要的处理。二值化[4]可以让图像变得简单,消除许多无关特征信息的干扰,让目标特征更突出,进行滤波[5]处理后,将目标特征附近的噪音进行滤除,使图像更清晰。
2.3 工业机器人末端执行器设计
机器人本体选用高速四轴DETLA 机器人,高速四轴DETLA 机器人能够带动末端执行器沿X 轴、Y轴、Z 轴移动和绕Z 轴转动。如图4 所示,盛物口正面朝上时,勺头部盛物口的上表面与水平面相互平行。盛物口正面朝下时,勺头部盛物口的上表面与水平面约成10°左右的夹角。基于勺子两种姿态时,选择勺头部盛物口的上表面作为吸取平面。

图4 汤勺侧视姿态图
吸盘竖直放置时,其下部为水平面。为了保证吸取平稳,设计时需要带动吸盘倾斜10°使吸盘下端面与勺子被吸取表面更好地贴合。基于经济性和优化控制原则,工业机器人本体选用高速四轴DETLA机器人,末端执行器如图5 所示。末端执行器由连接板、直行气缸、三角连接架、第一连接轴和第二连接轴组成,连接板固定在高速四轴DETLA 机器人的末端法兰上,两个三角连接架的一个顶点对称安装在连接板的两侧,第一连接轴的两端分别与两个三角连接架一个顶点固连,第二连接轴两端与两个三角连接架另一个顶点固连,直行气缸的缸体的一端与第一连接轴铰接,直行气缸的缸杆与吸盘连接部的上部铰接,吸盘连接部中部与第二连接轴转动连接,吸盘固定在吸盘连接部的下端。拾取盛物口正面朝下的汤勺时,直行气缸中缸杆伸缩带动吸盘连接部绕其中部转动,吸盘随吸盘连接部倾斜10°,吸盘下部与勺头部被吸取平面相互平行从而吸取平稳。拾取盛物口正面朝上的汤勺,直行气缸不动作,吸盘下部为水平面,吸盘下部与勺头部被吸取平面相互平行。
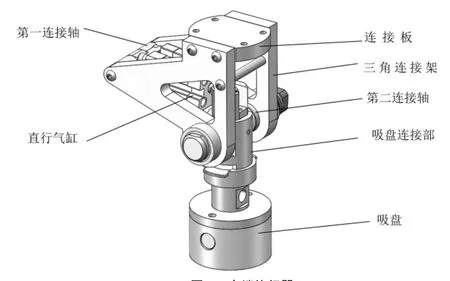
图5 末端执行器
2.4 翻转机构设计
餐具组装时,汤勺放置在盘子上且汤勺盛物口朝向小碗设置且倾靠在小碗上。鉴于装配时的姿态要求,在输送装置对应的输送段设置间隔均匀的餐具定位托盘。对于盛物口正面朝下的汤勺,末端执行器中直行气缸中缸杆伸缩带动吸盘连接部转动,吸盘随吸盘连接部倾斜10°,吸盘下部与勺头部被吸取平面相互平行从而吸取平稳,工业机器人本体带动吸吸取汤勺,工业机器人本体带动末端执行器转动调整勺柄的朝向一致放置到餐具定位托盘上。对于盛物口正面朝下的汤勺,末端执行器中吸盘吸取汤勺,工业机器人本体带动末端执行器转动调整勺柄的朝向一致放置到翻转机构上。
翻转机构需要改变汤勺盛物口的朝向。基于功能需求,翻转机构的设计如图6 所示,翻转机构中主动锥齿轮竖直设置,伺服电机带动主动锥齿轮转动,两个从动锥齿轮水平设置且分别布置在主动锥齿轮的两侧,两个从动锥齿轮均与主动锥齿轮啮合,两个吸盘安装座分别设置在两个从动锥齿轮远离主动锥齿轮的一端,吸盘安装座与从动锥齿轮同轴设置且两者通过转轴相连,两个吸盘分别设置在两个吸盘安装座上,靠近输送装置的吸盘朝下设置,远离输送装置的吸盘朝上设置。工业机器人将盛物口正面朝上的汤勺放置图6 中远离输送装置的吸盘上,旋转电机依次带动主动锥齿轮、从动锥齿轮、吸盘安装座转动,吸盘安装座绕主动锥齿轮的轴线转动180°到输送装置的另一侧,同时绕转轴的轴线转动180°改变吸盘朝向,从而实现汤勺翻转。
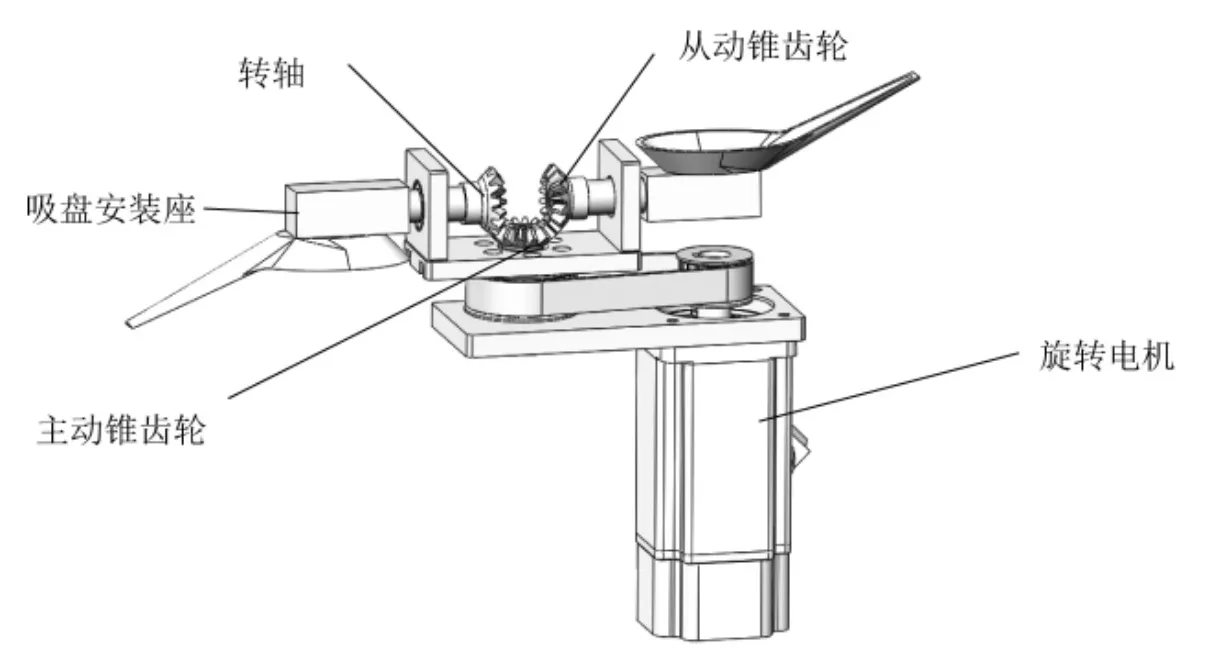
图6 翻转机构
3 结 语
针对餐具消毒生产企业亟需解决的汤勺自动分拣系统进行研究,将应用广泛的工业机器人与机器视觉系统引入到汤勺分拣系统中,设计了针对汤勺姿态的工业机器人末端执行器和翻转机构,最终设计出了一套基于漏网筛选和机器视觉定位的汤勺分拣系统。采用先进的PLC 自动控制系统,保证各工序输送装置、工业机器人及分拣设备按既定的节拍自动完成分拣工艺过程。
该汤勺自动分拣系统,相比于人工分拣,避免了人工分拣带来的二次污染问题,极大提升了汤勺分拣的效率和品质。随着餐具分拣生产自动化水平需求的不断提高,该汤勺分拣系统具有极大的应用市场。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
机械科学与技术(2022年2期)2022-03-30
动漫界·幼教365(中班)(2021年4期)2021-05-23
科技风(2021年10期)2021-04-18
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
电脑知识与技术(2016年3期)2016-04-07
小学阅读指南·高年级版(2015年5期)2015-09-10