
适配多尺寸缸筒的机器人手爪机构的设计
2022-05-10 12:10孙庭伟
机械制造 2022年4期
□ 孙庭伟
北京航天斯达科技有限公司 北京 100076
1 设计背景
近年来,工业六轴机器人在行业内的应用得到蓬勃发展,物流生产线码垛搬运是工业六轴机器人系统集成技术应用的典型代表。机器人动作由机器人本体和末端执行器共同完成,机器人本体及相关控制已经规模化。但在实际生产过程中,机器人末端手爪的适配性不是很高,需要专机专用,根据实际情况进行非标设计。笔者设计了适配多尺寸缸筒的机器人手爪机构,可以抓取多种直径、多种长度的缸筒零件。
2 技术要求
机器人本体通过机器人末端执行器,即机器人手爪将缸筒从A点抓取,放置到B点进行码垛,机器人手爪需要同时考虑夹持方式和A、B两点的定位工装,还需要兼容不同长度和直径的圆柱形缸筒。
采用安川GP180型机器人,有效负载为1 800 N,搬运区域直径为2 702 mm。要求机器人手爪可搬运重力为300~600 N的缸筒,缸筒的直径为110~200 mm,长度为600~1 400 mm。机器人手爪抓取缸筒的位置为输送线加托盘,托盘采用V形块支撑,如图1所示。机器人手爪放置缸筒码垛位置为木托盘,每层码垛五个,最高码垛四层,位置固定,如图2所示。
3 技术难点
由上述要求可以大致构思出机器人手爪的结构设计方向,技术难点主要集中在总载荷控制、多个品种兼容和抓取空间三个方面。

分析机器人有效负载与搬运缸筒载重的关系,机器人手爪要求总载重控制在1 100 N之内。为适应缸筒直径的变化,机器人手爪完全张开后需要大于200 mm,闭合后需要小于110 mm。为适应缸筒长度方向的变化,保证机器人手爪抓取的稳定性,机器人手爪轴向宽度也需要能够调节。分析机器人手爪的抓取和放置空间,机器人手爪各个方向具有可调节性,但抓取缸筒和放置缸筒的位置基本保持不变,由此对机器人手爪的抓取空间提出了要求,在进行不同规格缸筒码垛时,需要控制好抓取位置。
4 机架主体及连接法兰
机架主体及连接法兰总体结构如图3所示,机架主体如图4所示,连接法兰如图5所示。机架主体是机器人手爪的基础机构,为其它机构提供支撑和连接。连接法兰与机架主体相连。连接法兰上端连接机器人第六轴末端,通过定位环和定位销限位,保证机器人手爪和机器人的相对位置固定,再用六个M10螺钉连接紧固。机架主体由Q235钢焊接而成,整体形状近似槽钢,既保证整体的强度,又可最大限度节省材料。由于机架主体自身质量较大,在保证强度的基础上,对连接板进行打孔,减轻质量,并预留安装孔位。

5 梯形丝杠导轨滑块移动件
梯形丝杠导轨滑块移动件如图6所示。梯形丝杠导轨滑块移动件是适应缸筒长度方向变化可以进行调整的装置,整体与机架主体连接,下方连接至两组手爪装置。

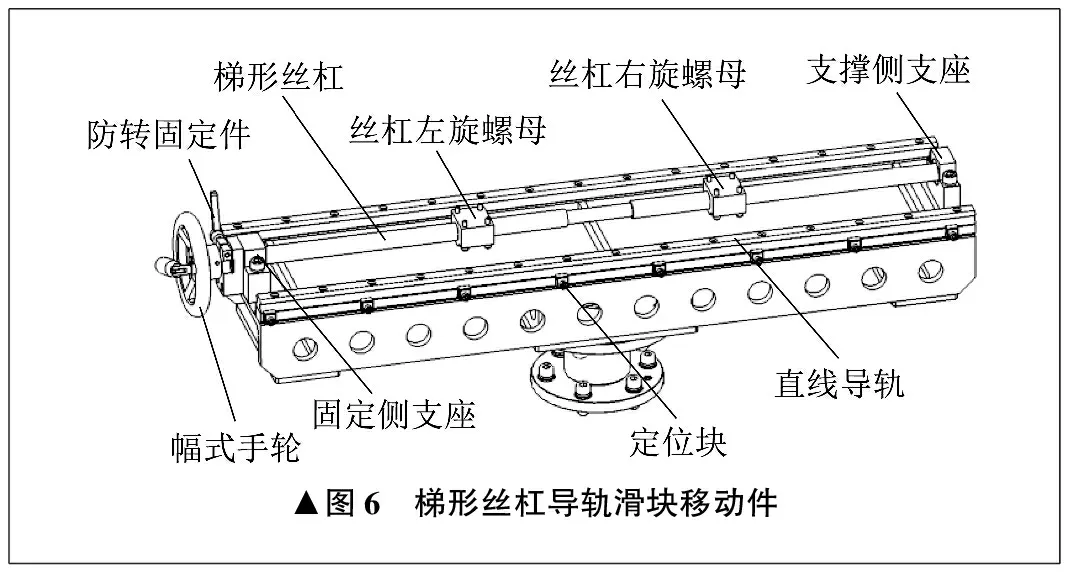
梯形丝杠导轨滑块移动件主要组成部分有梯形丝杠、丝杠左旋螺母、丝杠右旋螺母、防转固定件、幅式手轮、固定侧支座、直线导轨、支撑侧支座、定位块。
固定侧支座与支撑侧支座固定在机架主体上,中间穿入梯形丝杠。梯形丝杠中间穿入丝杠左旋螺母和丝杠右旋螺母,保持相对位置居中,旋转端增加防转固定件。在调整完位置后,扣下防转固定件,防止梯形丝杠转动。松开防转固定件,转动幅式手轮,可以移动丝杠左旋螺母和丝杠右旋螺母。直线导轨固定在梯形丝杠两侧,其中一侧采用定位块固定。手爪装置上的滑块固定在直线导轨上,丝杠左旋螺母和丝杠右旋螺母分别装在手爪装置上,可以保证转动幅式手轮时两个手爪装置对称移动。
6 手爪装置
手爪装置如图7所示。手爪机架为手爪装置的主体部分,滑块安装板和大导轨滑块安装于手爪机架上。调整好夹取缸筒位置后,手爪固定件通过紧定螺钉可以与机架主体相接触,起到防偏移作用。小滑块和小导轨为手指移动组件,使机器人在抓取缸筒时实现移动。手指气缸为夹取缸筒提供动力。先导止回阀为保压装置,防止在系统突然断气后手爪装置松开,避免抓取的缸筒掉落。气缸连接件将气缸和手指组件连接在一起。对中齿轮和齿条组成的机构保证了手爪装置对中移动的对称性,使两组手爪装置的夹取相互作用力保持一致。
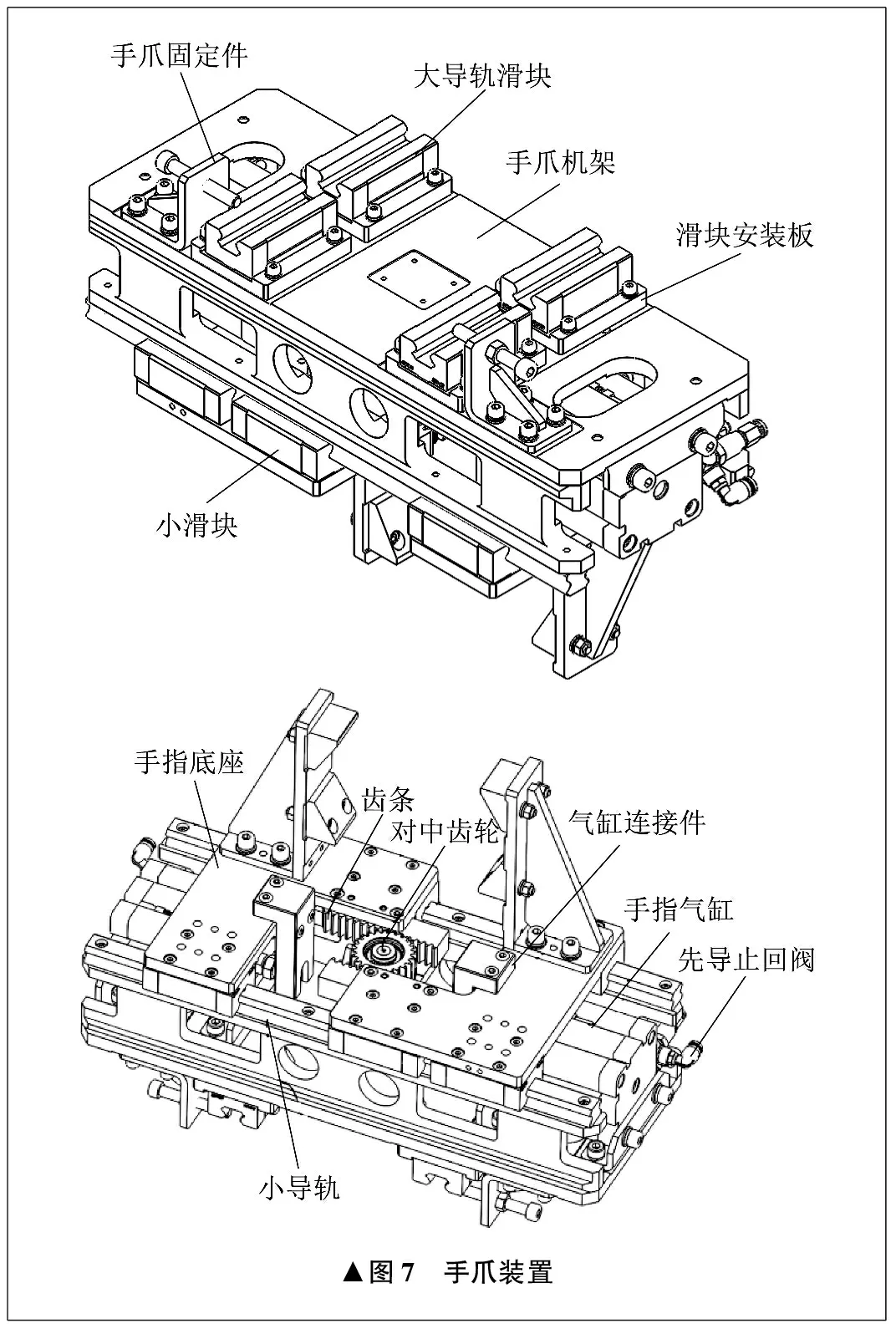
手爪装置是整个机器人手爪的核心机构,两组手爪装置配合,可以抓取不同直径、不同长度的缸筒。缸筒直径变化时,手指上装有位置传感器,调节之后即可检测到夹取缸筒的情况。手指底座上有两组手指安装位,可以对缸筒夹取的长度进行扩展。手爪机构整体紧凑,兼容性强,适合多种缸筒零件的夹取。
7 手指夹持装置
手指夹持装置如图8所示,包括手指底座、手指支架、手指、感应片。手指支架安装在手指底座上,手指安装在手指支架上。手指为黄铜材质,与缸筒接触时不会夹伤缸筒。感应片作为手指感应装置,用于感应有无夹持缸筒。

8 实物
为验证各个设计单元是否满足使用要求和使用功能,对机器人手爪各单元机件进行了生产加工,对外购件进行了选型采购,最终制作的机器人手爪实物如图9所示。

对加工完成的机器人手爪进行实际生产验证,采用不同直径和不同长度的缸筒进行码垛,确认机器人手爪可以适应不同尺寸缸筒的码垛工作,并且动作合理,路径简单。
9 结束语
笔者设计了一种适配多尺寸缸筒的机器人手爪机构,具有设计原理清晰、结构紧凑、适用性强等优点,能够适配多种尺寸缸筒的码垛。实际生产验证结果表明,所设计的机器人手爪工作可靠,具有很好的推广应用价值。
猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
机械设计与制造(2022年10期)2022-10-12
机床与液压(2022年8期)2022-09-19
现代制造技术与装备(2022年1期)2022-02-21
商品与质量(2020年48期)2020-11-26
汽车实用技术(2020年4期)2020-04-10
家庭影院技术(2019年12期)2020-01-19
电子制作(2019年20期)2019-12-04
中国计算机报(2018年13期)2018-05-23
钢管(2014年3期)2014-09-25
