
矿用胶轮车调度系统设计
2022-05-12 07:01王斌
机械管理开发 2022年2期
王 斌
(晋能控股集团阳泉煤炭事业部阳泉新瑞昌机械有限公司, 山西 阳泉 045000)
引言
矿用无轨胶轮车是煤矿重要的辅助运输装备,具有调度灵活、运输成本低、维修方便的特点。随着煤矿井下无轨胶轮车投入运行数量的不断增加,由胶轮车引发的井下安全事故不断增多,特别是在巷道狭窄、光线昏暗、转弯处、三岔口、斜坡等关键点处容易发生拥堵,严重时甚至引发井下安全交通事故。为提升煤矿井下无轨胶轮车运行效率,保障无轨胶轮车安全、稳定运行,亟需设计并开发一套矿用无轨胶轮车调度系统[1]。该系统能够使胶轮车运输灵活,按照信号灯统一行使,关键点合理调度,防止出现拥堵和安全事故;合理分配胶轮车资源,在地面及时掌握井下胶轮车运行状态,达到降本增效的目的。国外学者对矿用胶轮车调度系统的研究较早,如20 世纪70 年代德国Blumenthaler 煤矿将胶轮车监控系统投入使用,并实现了车辆自主调度。美国JOY 研发的车辆调度系统可记录胶轮车上下井时间及行驶轨迹,当胶轮车偏离预定轨迹后,调度系统会发出报警,极大地提高了胶轮车运行的安全性[2-4]。国内学者基于单板机、多机网络通信控制器、WinCC 等设计了胶轮车调度系统,但还存在胶轮车数据不完整、运行效率不高、调度策略不合理、安全事故频发等问题[5-6]。本文针对现有胶轮车调度系统存在问题,设计基于无线传输的矿用胶轮车调度系统,实现胶轮车的监控、定位和自动控制。
1 整体结构设计
矿用胶轮车调度系统整体结构设计如图1 所示,其由地面、井下两部分系统组成,地面系统的主站控制器为控制核心,负责接收井下胶轮车运行时的全部信息,并完成数据存储、数据备份、数据终端显示及大屏显示;同时,将地面控制指令经核心交换机后下发至各控制分站。井下系统由核心交换机、1~n 号交换机、1~n 号控制分站及井下胶轮车组成。可将1 号控制分站及在该分站无线覆盖范围内的胶轮车看作一个节点,在该节点内布置摄像仪、语音报警、信号灯、检测节点等设备,获取该节点内胶轮车视频信息并上传至对应的交换机;控制分站根据路况、运行优先级控制信号灯,使得该节点内的胶轮车有序运行,当发生故障或者行进过程中需要语音提示时,触发语音报警[7]。在胶轮车车身安装车速、油温、油压、位移等传感器,实时监测胶轮车运行状态;安装的未知节点周期性地向无线基站发送车辆信息;安装的车辆信息监测仪监测各传感器数据是否在设定的阈值范围内,当超出阈值时,发出故障报警信号。
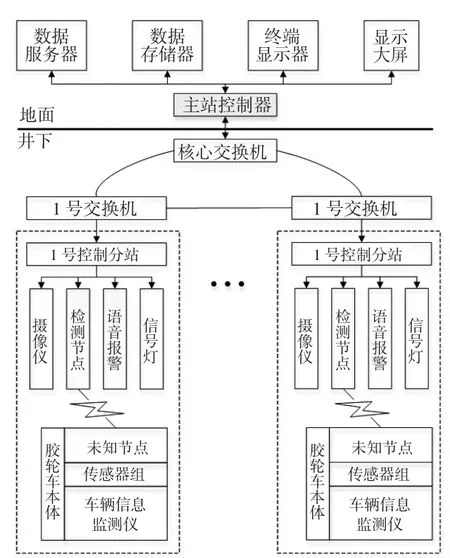
图1 矿用胶轮车调度系统整体设计框图
2 硬件设计
矿用胶轮车调度系统的核心硬件主要包括主站控制器、交换机、车辆监测仪、未知节点、检测节点及分站控制器等。主站控制器选用研华610-H/L,该设备数据处理实时性好、稳定性高,可在煤矿井下恶劣环境中长时间稳定工作。该设备支持TCP/IP、CAN、RS485 等通信方式,有丰富的I/O 接口,可满足矿用胶轮车调度系统要求。交换机选用本质安全型KJJ18 核心交换机,支持TCP/IP、CAN、RS485 通信,可提供4 路千兆TCP/IP 接口、1 路RS485 接口、1 路CAN 总线通信接口,符合IEEE802.3 协议,支持令牌网、环形网结构。车辆信息监测仪选用YE0.3/24 保护监测仪,可监测的转速范围为0~5 000 r/min,温度检测范围为0~160 ℃,瓦斯检测范围为0.00~4.00%,车速监测范围为0~150 km/h;该模块的供电电压为DC24V[8-9]。未知节点及检测节点选用TC3390+RSSI 模块,该模块核心芯片采用TC3390,支持Wi-Fi 无线通信,具有功耗低、灵敏度好、抗干扰能力强的特点[10]。该模块支持RSSI 定位算法,其中未知节点安装在胶轮车车体,周期性地向无线基站发送车辆信息;检测节点安装于巷道煤壁固定未知,接收车载监测仪发送的数据,同时将数据转发给井下分站控制器。分站控制器需完成胶轮车定位并与主站完成信息交互及控制信号灯,选用西门子S7-200SMART PLC 控制器,该控制器支持RS485、CAN 总线通信,可同时处理多路信息并完成数据交互,可根据功能要求扩展数字量、模拟量及通信接口模块。
3 软件设计
3.1 安全行车规则
矿用无轨胶轮车行驶于宽巷道中时,需遵循“红灯停、绿灯行”规则靠右行驶,不得停车、不得掉头,跟车距离需保持在50 m 以上,载物车速不超过40 km/h,载人车速不超过30 km/h,上下坡车速不超过15 km/h,起步或者倒车时需鸣笛示意,经过拐弯、上下坡时需鸣笛通过。矿用无轨胶轮车行驶于窄巷道时,还需特别遵循靠中间行驶的原则,载物车速不超过30 km/h,载人车速不超过20 km/h,上下坡车速不超过10 km/h;区间内严格限制车辆数目;不允许在该区间内倒车、调头。矿用无轨胶轮车行驶于三岔巷道中时,还需特别遵循该区段最多只允许一辆车行驶的原则,需根据下一巷道结构调整行车状态,严格按照信号指示灯行驶,必要时驶入避车室内。
3.2 车辆行驶方向判定
胶轮车行驶的巷道内安装有检测节点,车辆经过时,会被多个检测节点检测到,定义信号强度分别为RSSIn1、RSSIn2、RSSInm,筛选出信号强度最强的两个节点,定义为RSSIn1、RSSIn2,则表明车辆在该两个检测节点区间内。定义信号强度强为1,信号强度弱为-1,则当RSSIn1=-1 且RSSIn2=1 时,车辆向检测节点n2方向行驶;当且时,车辆停止;当且时,车辆停止;当且时,车辆向检测节点n1方向行驶。
3.3 车辆进出区间判定
车辆进出区间判定的目的是确认当前时刻在本区间内胶轮车的数量,定义检测节点检测到的信号最强的两个节点为Xi、Yj,其中X、Y 表示区间名称,i、j 表示车辆在该区间内的编号。定义R 为判断条件,则R=X-Y,当R=0 时,则表示两个节点在同一行车区间,胶轮车在该区间内;当R≠0 时,则表示两个节点不在同一行车区间,胶轮车处于避车区间。
3.4 车辆调度策略
矿用胶轮车调度策略即控制车辆的行驶或者停车,需在安全行车的前提下,综合考虑巷道类型、区间内车辆的数量、行驶方向等。调度整体流程如图2所示,依次步骤为:提取行车区间编号、根据编号判断区间巷道类型、调用相应巷道类型的控制程序、得出车辆控制流程。

图2 矿用胶轮车调度整体流程
矿用胶轮车调度策略分为直线宽巷道、直线窄巷道、三岔巷道三种情形。定义胶轮车最长车身长度为lmax,两车之间的安全距离为ds,则一辆胶轮车在巷道内的总长lmaxs可表示为lmaxs=lmax+ds。定义车辆行驶的巷道总长为L,则该区间巷道最大可容纳的胶轮车数量nmax可表示为nmax=L/lmaxs。实际调度过程中,控制策略需根据车辆进入或者驶出该区间的特征,分析在该区间内可容纳的车辆数目Q 进行车辆调度,定义Q=nmax-n。当Q>0 时,表示该区间可驶入新的车辆,信号灯为绿;当Q=0 时,表示该区间车辆数据达到最大,不可驶入,信号灯为红。定义车辆之间的安全距离为dS,实际距离为d,则车距条件S 可表示为S=d-dS。当S>0 时,表示实际运行车辆距离大于安全距离;当S<0 时,表示实际运行车辆距离小于安全距离,应减速慢行。针对直线窄巷道、三岔巷道车辆调度控制流程如下页图3、图4 所示。
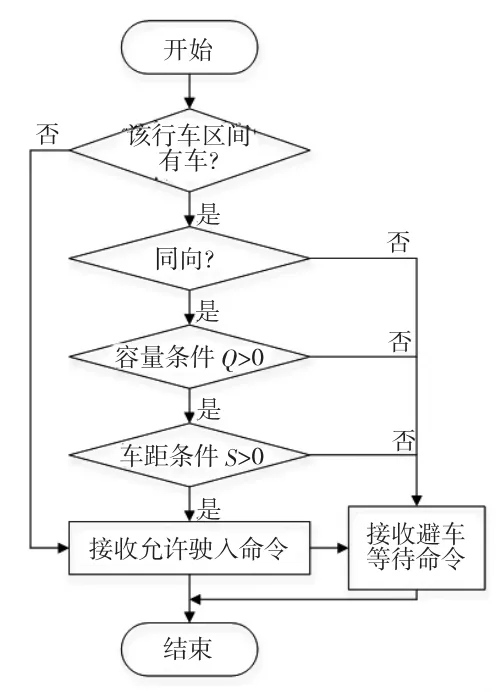
图3 直线窄巷道调度控制
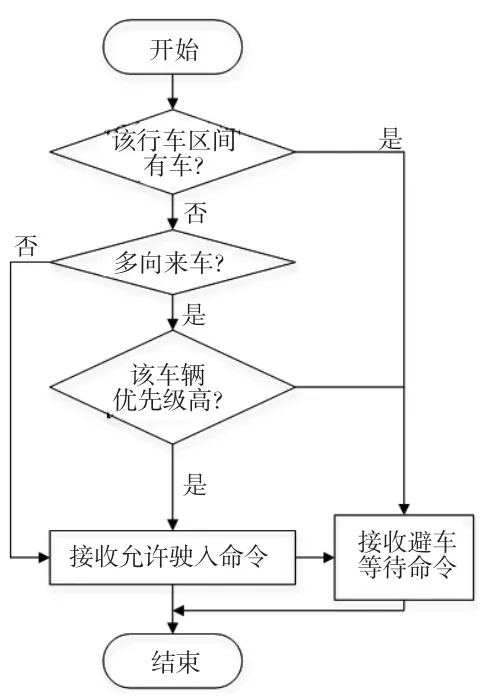
图4 三岔巷道调度控制
4 结语
设计并实现的矿用胶轮车调度系统,有效解决了煤矿辅助运输运行效率低下、故障较高的问题,为煤矿井下安全生产提供了有力保障。现场实际应用表明,该调度系统运行稳定、可靠、高效,显著提升了煤矿辅助运输系统的管理水平。
猜你喜欢
世界汽车(2022年6期)2022-07-13
商品与质量(2019年12期)2019-12-19
建材发展导向(2019年10期)2019-08-24
煤矿安全(2019年6期)2019-08-05
煤矿机电(2019年2期)2019-04-17
科学与财富(2017年30期)2018-01-01
电子制作(2017年17期)2017-12-18
中国质量万里行(2016年9期)2016-11-11
车迷(2015年11期)2015-08-23
中国新技术新产品(2014年13期)2014-08-26
