
焊接机械臂结构设计研究
2022-05-14 02:49何成文
机械管理开发 2022年3期
何成文
(太原市科技评估中心,山西 太原 034000)
引言
随着工业机器人行业的不断发展,工业机器人的应用已普及到各行各业。在一些工作环境十分恶劣,且需连续不断提供焊接作业的工作场所,人力提供焊接较为困难,焊接机器人成为解决这一问题的主力军。焊接机器人可以在恶劣的工作环境下提供连续不断的焊接作业,降低工作生产风险,同时焊接机器人由于程序化的设置,可进行流程化作业,提供持续稳定的高质量焊接作业,可降低人员要求与成本预算。本文拟针对日常焊接作业中常见焊缝,针对性设计出一台焊接机械臂,并进行相应的动力学仿真分析,以期对企业焊接技术发展有所帮助。
1 焊接机械臂功能设计分析
在日常焊接作业中,对于直线型的钢板焊缝以及直角或非直角类的钢管相交的相贯线焊缝采用人工焊接方法存在困难。本文拟针对该类焊缝设计出一台专用小型焊接机械臂,以满足企业日常生产需求,其焊接的对象如图1 所示。
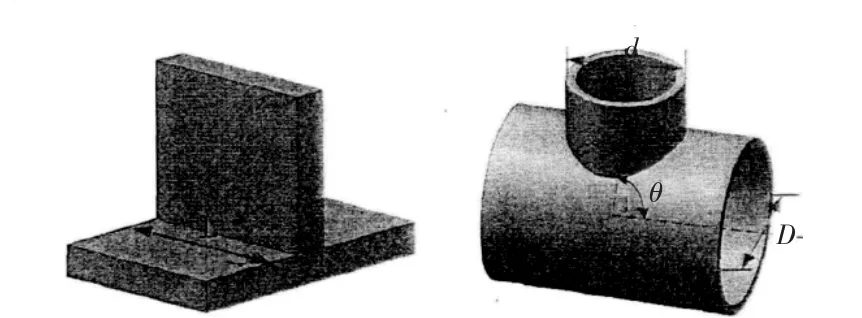
图1 焊接机械臂焊接对象示意图
在功能方面,由于机械臂的主要功能为实现工作对象的焊接作业,故焊接功能必不可少;同时,焊接机械臂需依据焊缝的位置不断输入信号变换焊枪位置,从而形成特定轨迹,完成焊接作业,故焊接机械臂也应具有定位功能,完成焊接作业。在性能方面,焊接机械臂需满足工作空间、负载以及焊接速度的要求。其中,负载主要是焊接作业时机械臂的惯性力以及自重;速度要求需符合焊接工艺,与焊接的作业方式相匹配[1-2]。
2 焊接机械臂结构设计研究
焊接机械臂能否完美完成设定的焊接作业任务,其中最关键的因素是焊接机械臂结构形态设计是否合理,其对机械臂运动方式和运动轨迹的控制至关重要。在机械臂结构设计中,除了需考虑焊接任务需求外,还应对机械臂的经济性、可靠性以及高效性进行考虑。
2.1 结构部件设计选型
2.1.1 驱动方式
驱动设备是焊接机械臂的主要动力来源。传统的驱动设备主要分为液压、气压以及电机三种驱动方式。由上述需求分析可知,焊接机械臂的设计需满足精准的定位需求及其相应的力学负载能力,定位精度主要用于平面定位,载荷主要由两个关节进行承受,这就要求驱动设备需满足高精度且设备运行需灵敏,故本设计拟选用交流伺服电动机中的步进电机。
2.1.2 传动方式
机械臂的传动一般有齿轮传动、行星轮传动、齿轮齿条传动和谐波传动等传动方式。大小臂由于需承受载荷,故选用推力圆锥滚子轴承加行星减速器的组合。大臂与小臂之间选用齿轮传动,可为后续的使用提供方便。末端执行机构需在Z 轴方向直线与旋转运动,同时该机构要求质量要轻,结构需紧凑,故本文进行了如下页图2 所示的设计。其中,大小臂电机选择三菱的交流伺服电机HF-KN23(B)J-S100,减速器选择上海柯雄FBR60-70-S2-P1。

图2 传统系统设计示意图
2.1.3 机械臂大小臂结构设计
机械臂的大臂与小臂为焊接机械人的主要执行机构,该部位运动多、受力复杂且承受载荷较大,在运行过程中需承受较大的惯性力和震动冲击,极易发生损坏,故该部位设计时首先应具有较高的刚性强度,同时部件本身质量应较轻,以达到反应快、加速好、运行稳、定位准、强度大、承载力强等性能目标。
机械臂大臂设计为旋转关节串联,第一个关节设计为行星式,可使机械臂大臂运行灵活,同时伸出轴具有行星架,可使两轴拉紧增强刚性,保证大臂稳定运行。第二关节使用电机驱动小臂轴,可通过齿轮传动使小臂实现旋转。机械臂小臂竖直移动设计为蜗轮蜗杆减速电机驱动,通过齿轮齿条传动实现。其中,齿条在立轴之上,齿轮传动与电机在上臂上。立轴内设计内转轴,使结构更加紧凑,减轻重量。内转轴下方设置摆动机构,各部件转动、升降设置独立的电动机进行驱动。
2.2 总体结构设计方案
通过上述对焊接机械臂进行分析后,可对焊接机械臂进行整体结构设计。机械臂具体可分为基座、大臂、小臂等,部件由4 个转动关节和1 个移动关节连接。大臂采用螺栓连接与基座连接,可在基座轴平面内自由转动,小臂与大臂立轴连接,可在立轴平面内旋转,小臂外设升降立轴,立轴设内转轴,内转轴铰接腕部摆动机构,实现焊枪的灵活动作。其具体的结构设计示意图如图3 所示。为降低研发与制造成本,缩短设计研发期限,本设计所使用部件尽量选用标准件,以降低成本,提高效率。

图3 焊接机械臂总体结构设计示意图
3 机械臂动力仿真分析
由于机械臂所设计的焊接对象为直线焊缝与相贯线焊缝,故本文拟采用ADAMS 软件分别对两种焊缝进行动力学仿真分析,其末端轨迹示意图如图4 所示。
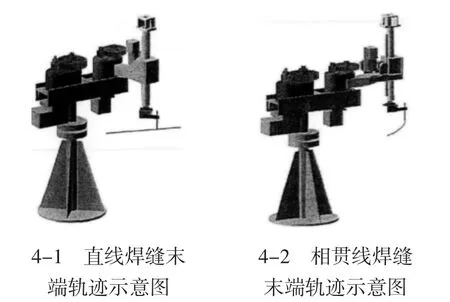
图4 动力学末端轨迹示意图
对仿真数据分析后可知,机械臂大小臂的旋转角度、角速度、加速度、力矩在运行过程中变化平稳,未出现较大波动现象;焊接过程较为平滑,符合焊接工艺要求。由于大臂与小臂为整个焊接机械臂中载荷承受的关键点,故对大臂与小臂进行了力矩分析。运用ADAMS 分析可知,大臂关节所受最大关节力矩为39 N·m,小臂的最大关节力矩为51 N·m,大臂驱动所选用的电动机型号为HF-KN23(B)J-S100,小臂选用的电动机型号为HF-KJ13(B)J-S100,其额定力矩分别为134.4 N·m、64 N·m,最大力矩分别为420 N·m、200 N·m,大小臂关节力矩均符合电机设置,故该机械臂设计符合实际使用要求[3-5]。
4 结论
1)焊接机械臂主要针对直线焊缝与相贯线焊缝;在功能方面,需有焊接功能和定位功能;在性能方面,焊接机械臂需满足工作空间、负载以及焊接速度的要求。
2)依据焊接机械臂的使用需求,设计出了机械臂的整体结构方案,并对其进行了相应的结构力学仿真分析。
3)经力学仿真分析后发现,机械臂大小臂的旋转角度、角速度、加速度、力矩运行变化平稳;臂关节所受最大关节力矩为39 N·m,小臂的最大关节力矩为51 N·m,所选电动机额定力矩分别为134.4 N·m、64 N·m,最大力矩分别为420 N·m、200 N·m,大小臂关节力矩均符合电机设置,各节点力矩符合要求。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
家庭百事通·健康一点通(2020年11期)2020-11-30
商品与质量(2020年35期)2020-11-06
物流技术与应用(2020年4期)2020-05-06
科学技术创新(2020年1期)2020-03-26
载人航天(2016年4期)2016-12-01
汽车实用技术(2015年8期)2015-12-26
