
矿用掘进机远程控制系统的设计与应用研究
2022-05-14 02:49李翔宇
机械管理开发 2022年3期
李翔宇
(晋能控股煤业集团胡底煤业有限公司,山西 晋城 048200)
引言
掘进机是煤矿开采中的重要机械装备,其运行性能好坏对煤矿开采效率有非常重要的影响。在传统的煤矿掘进模式中,掘进机需要通过专门的司机对其进行操作,从而完成掘进工作[1]。但煤矿巷道环境相对较为恶劣,在掘进过程中会涌现出大量的瓦斯及其他有毒有害气体,会对司机的身体健康造成不良影响,严重时还会威胁人员的安全[2]。为了解决该问题,国内外很多学者和技术人员都尝试研究掘进机的远程控制系统,即通过远程的方式对掘进机进行控制,现场无需专门人员对其进行操作[3-4]。通过这种方式可以让控制人员远离恶劣的操作环境,保障人员的身体健康和人身安全[5]。
1 矿用掘进机结构概述
本文主要以EBZ-160 型矿用掘进机为研究对象,结合实际情况对该型号掘进机的远程控制系统进行设计和研究,如图1 所示为该型号掘进机的主要结构示意图。从图1 中可以看出,整个掘进机主要由工作机构、铲板、回转台、行走机构、液压系统、电气系统、双链板运输机、后转载等部分构成。不同结构发挥各自的作用,共同实现掘进机的各项功能。其中电气系统的作用最为关键,是反映掘进机设备性能好坏的重要指标。传统的掘进机中,即便性能再好的电气系统,都需要通过操作人员在现场对设备进行操作,通过电气系统对各种液压系统和机械系统进行控制,才能实现设备的掘进功能。各种控制模式已经无法满足煤矿现代化发展的基本需要,本文针对该设备设计研究一种远程控制系统,实现人机分离,通过远程方式对设备进行控制。
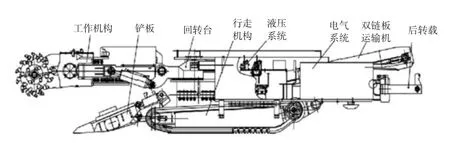
图1 EBZ-160 型掘进机的主要结构示意图
2 掘进机远程控制系统整体方案设计
2.1 控制系统的整体结构
在分析无人化工作面基本需求的基础上,对EBZ-160 型掘进机的远程控制系统整体方案进行了设计研究,如图2 所示为设计的远程控制系统整体结构框图。从图2 中可以看出,整个控制系统由五大部分构成,分别为电控系统、显示系统、执行系统、传感检测系统和视频监视系统。除视频监视系统以外,其他系统全部和PLC 控制器进行连接,将数据传入PLC 控制器中进行分析并接受PLC 控制器的控制,从而实现掘进机的自动化运行。
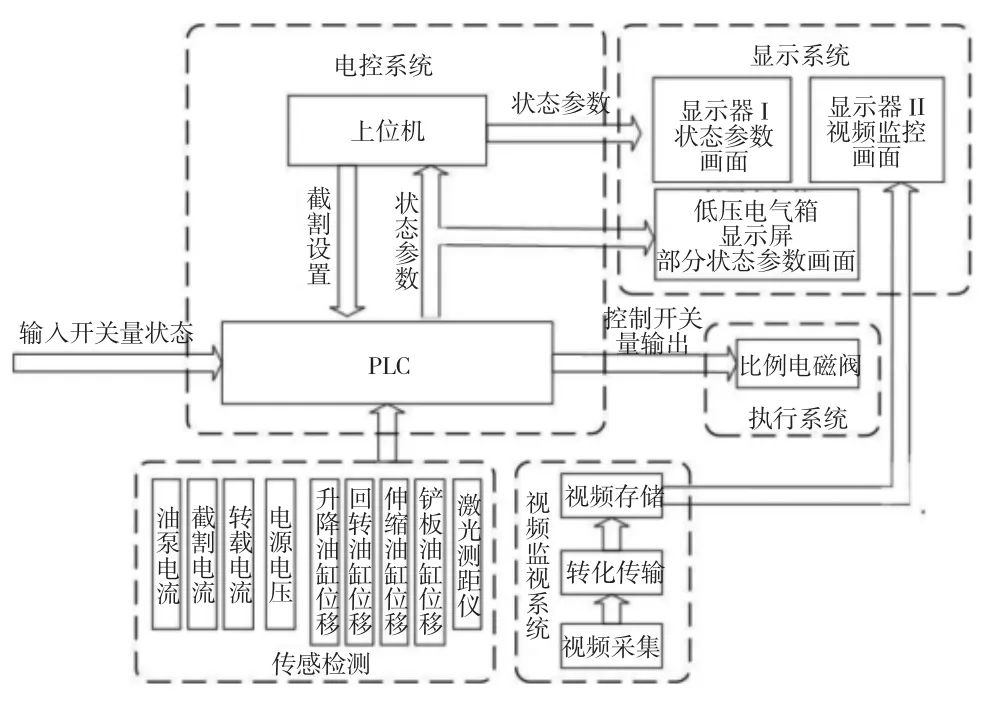
图2 掘进机远程控制系统的整体结构框图
2.2 系统的主要构成
1)传感检测系统。作用主要是对掘进机各子系统的运行状态信息进行实时检测,需要检测的数据信息包括电机运行电流和电压值、设备整体姿态信息、截割头位置信息等,采集得到的信息传入到PLC控制器中进行分析和处理。
2)控制系统。传感器采集得到的信息会传入到控制系统中的PLC 控制器中,根据内置程序对数据信息进行分析处理,得到相关结果并根据结果下达控制指令。所有重要的数据信息都需要传入到显示系统中进行实时显示,以便工作人员及时掌握掘进机的工作状态。
3)执行系统。执行系统主要通过运动放大卡和比例电磁阀等元器件构成,作用是根据控制系统下达的控制指令对机械结构进行控制,实现掘进机的各种动作,完成掘进工作。
4)视频监视系统。主要作用是利用高清防爆摄像头对掘进机进行全方位监控,采集得到的视频信息通过工业以太网传输到控制室,并在显示屏中实时显示,操作人员可以通过视频实时掌握掘进机在巷道中的实际状态。
5)显示系统。远程控制系统中的显示系统由三台显示器组成,其中一台显示器主要显示视频监视系统传输的视频信息,一台显示器显示掘进机的运行状态数据信息,这两台显示器放置在远程控制室。另外,在掘进机中设置一台显示器,同样可以观察其运行状态。
3 远程控制系统主要硬件选型设计
3.1 PLC 控制器选型
由于掘进机需要实现无人化操作,所以对PLC控制器的性能要求相对较高。由于掘进机工作时需要进行运算的量并不是非常大,基于以上实际情况选用的是西门子公司研制生产的S7-300 型PLC 控制器,该型号控制器在工程中得到很多的应用,运行效果较好[6]。S7-300 型PLC 控制器具有很多模块可以使用,具有丰富的AI 和AO 接口,通过这些接口可以与其它硬件设置进行连接,从而拓展控制器的功能。
如图3 所示为S7-300 型PLC 控制器的整体结构框图。由图3 可知,PLC 控制器主要由电源、CPU和存储器等元器件构成,其中CPU 是PLC 控制器的核心,其性能好坏对控制器的性能有决定性的影响。在控制器中选用的CPU 型号224XP,该CPU 不仅价格便宜,并且具有良好的运行速度,自带24 个I/O接口,7 个扩展接口和2 个通信接口。

图3 PLC 控制器的结构框图
3.2 传感器选型
远程控制系统涉及到很多传感器,以下主要对激光传感器和直线位移传感器进行介绍。
1)激光传感器。该传感器的作用主要是测量距离,由于矿井工作环境复杂,对测量结果精度影响的因素相对较多,所以选用的是工业级大功率激光测距仪器。具体而言选用的是DLS-E50 型激光测距仪器,如图4 所示为该传感器的实物图。该传感器的优势在于可以实现无接触测量,且结果精度相对较高,在很多工业领域得到广泛应用。测量距离可以在0.5~10 m 范围内,精度可以控制在3 mm 范围内。

图4 DLS-E50 型激光测距仪器
2)位移传感器。该传感器的主要作用是对掘进机中各机械结构的运动位移大小进行实时检测,因此需要将传感器内置到掘进机各油缸内。传感器的工作属性决定了该传感器难以维护保养,对传感器的性能提出了相对更高的要求,结合实际情况选用的是GUC1200(A)矿用本安型位移传感器,量程可达到1 200 mm,如图5 所示为该传感器的实物图。

图5 GUC1200(A)矿用本安型位移传感器
4 掘进机远程控制系统的应用效果分析
将以上设计的矿用掘进机远程控制系统应用到煤矿开采工程实践中,并对应用效果进行了实践测试与验证,对控制系统的实践运行情况进行了连续六个月时间的观察与测试。结果发现,在整个测试期间控制系统运行良好稳定,具有很高的可靠性,操作人员可以在远程操作端对掘进机进行控制,完成相关的掘进工作。
远程控制系统的成功实践应用,使得煤矿开采自动化水平得到了显著提升。与原有的操作模式相比较,人工劳动强度得到显著降低,且可以很好的保障操作人员的身体健康和人生安全。通过数据对比发现,可以降低人工成本15%以上。由于实现了自动化控制,所以掘进断面质量得到了明显提升,远程控制精确度超过98%,可以对掘进机的行走轨迹进行精准控制,与原有控制模式相比较,行走偏差调节时间缩短30%左右。经过初步统计分析认为,通过使用远程控制系统,每年可以为煤矿企业创造200 万元的经济效益。
5 结语
煤矿开采中掘进机发挥着非常重要的作用,会对煤矿开采效率产生非常重要的影响。掘进机设备的自动化水平会影响整个煤矿企业的自动化水平。本文以EBZ-160 型矿用掘进机为研究对象,结合实际情况设计研究了远程控制系统,该控制系统的成功实践应用,实现了掘进机的远程控制,不仅保障了设备操作人员的身心健康,同时在很大程度上提升了掘进机的运行效率。通过实践应用测试发现,远程控制系统的控制精度有了显著提升,控制效率也得到了很好的改善,每年可以为煤矿企业创造200 万元的经济效益。
猜你喜欢
西部探矿工程(2022年8期)2022-08-08
现代妇女(2022年5期)2022-05-25
英语文摘(2021年11期)2021-12-31
科学与财富(2021年33期)2021-05-10
建材发展导向(2019年10期)2019-08-24
学生天地(2018年19期)2018-09-07
电子制作(2017年17期)2017-12-18
中国新技术新产品(2016年20期)2016-12-08
中国质量万里行(2016年9期)2016-11-11
山东工业技术(2015年21期)2015-11-04
