基于差分GNSS/INS组合定位基准的网约车计程检测技术研究
2022-05-16 08:48潘树国
中国计量大学学报 2022年1期
张 杰,曹 相,刘 宏,高 旺,何 璇,潘树国
(1.南京市计量监督检测院,江苏 南京 210039;2.东南大学 仪器科学与工程学院,江苏 南京 210096)
随着互联网以及移动智能终端的普及应用,网络预约出租车(以下简称“网约车”)逐渐成为公众出行的重要方式之一,已成为智慧民生的重要组成部分。网约车通过记录车辆服务过程的行驶距离和行驶时间实现用户乘车的计费,准确的计程是网约车合理收费和规范服务的重要保障。目前市场中网约车计程通常采用手机端定位服务,即采用手机内置的低成本定位模块和电子地图进行计程计时。然后,由于手机定位通常采用消费级的导航定位模块,在城市环境中存在显著的定位不准问题,在建筑密集区、隧道等复杂环境下甚至无法完成定位,并进一步造成低速计时存在较大的偏差,由此导致的计程计时不准问题时有发生。对网约车的计程计时系统进行检测是规范其服务的迫切需求,为此,国家卫星导航定位与授时产业计量测试中心于2016年起草并发布四项网约车计程计时规范[1-4],明确计程误差应在-4%~+1%。
运动场景下的计程检测需要精度更高的检测基准,且需保证待检终端与基准系统在同一路径、同一观测环境下进行。目前国内外仅有少量文献研究了网约车计程的量化检测问题,文献[5]提出采用实验室模拟器法对计程终端进行检测,通过场景库数据事后回放的方式,实现对智能手机计程精度的检测,但是由于预先采集的场景库数据并非手机天线实时捕获的真实数据,可能造成手机计程精度过优的问题。在真实道路环境下,对网约车计程实施检测的前提是获得更高精度的里程基准,而里程基准的获得需要依托高精度的定位信息。目前,针对城市环境,高精度定位主要采用卫星导航(Global Navigation Satellite System, GNSS)和捷联惯性导航(Inertial Navigation System, INS)组合,国内外有诸多学者进行了相关研究,依托多星座GNSS和高性能惯性器件,能够在城市环境下实现连续的高精度定位结果[6-7]。本文以差分GNSS/INS组合定位手段为基础,研究并提出了一种以组合定位为基准的网约车计程检测方法,用以实现真实动态环境下的网约车终端计程检测。
1 计程基准的原理
1.1 差分GNSS/INS组合定位模型
本文采用差分GNSS/INS组合定位作为计程检测的基准,系统组成如图1。GNSS单站定位会受到卫星轨道误差、卫星钟误差、大气传播误差等诸多因素的干扰,定位精度较低;采用差分定位可利用基准站与用户站之间的误差相关性,消除或削弱卫星钟差、轨道误差、电离层延迟误差、对流层延迟误等,从而提高定位的精度[8]。在此基础上,通过与INS的组合定位,可进一步提高城市复杂环境下的连续定位能力[9-10],并可获得高采样的定位结果(一般为200 Hz)。

图1 网约车计程检测系统组成示意图Figure 1 Schematic diagram of composition of app-based ride-hailing detection system
根据观测值的类型,GNSS/INS组合定位可分为两种,一种是基于伪距和伪距率的组合;另一种是基于载波相位的组合。基于伪距和伪距率的组合,实施方便但精度较低,一般只能实现米级精度;基于载波相位的组合精度较高,可实现厘米级精度,但需要处理载波整周模糊度问题。考虑网约车计程检测基准的精度需要,以及检测实施可采用实时采集数据、事后解算的方式,因此本文采用基于载波的GNSS/INS组合作为定位模式,从而恢复出行车里程。利用惯性导航系统的运动模型方程,以东北天坐标系为导航坐标系(n系)建立INS位置、速度、姿态误差更新方程,包含15维未知参数(三维位置、三维速度、三维姿态、三维陀螺零偏、三维加计零偏)[11-12]:
(1)

利用松耦合模型和卡尔曼滤波将GNSS载波差分定位结果(固定解)与INS进行组合定位,包含状态方程和观测方程两部分,其中状态方程为
Xk=FXk-1+GWk。
(2)
Xk为当前时刻状态参数,Xk-1为上一时刻状态参数,F是两个时刻的状态转移矩阵。Wk是系统噪声矩阵。G是噪声分配矩阵,包含了状态向量相关的方差。
松耦合系统观测方程中输入量Z为位置测量值和速度观测值,即惯导解算出的位置Vins与卫星定位的位置Vgnss之差,惯导解算出的速度Pins与卫星定位计算速度Pgnss之差。
(3)
H是系统测量矩阵,表示无噪声时各个状态的线性组合得到观测值。Vk是系统量测噪声矩阵。利用式(2)和式(3)进行卡尔曼滤波解算,即可得到车辆载体的高采样、高精度定位结果。本文实验中,采用的基准站和流动站GNSS接收机板卡为Trimble BD990,IMU采用的是ADIS-16488A,卡尔曼滤波解算过程中使用的相关参数如表1。

表1 卡尔曼滤波解算相关参数Table 1 Related parameters in Kalman filter solution
上述基于载波的GNSS/INS组合定位原理及流程图如图2。
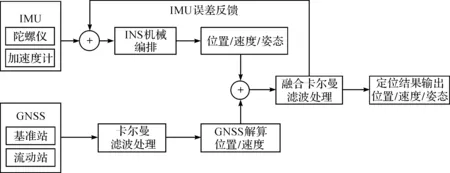
图2 基于载波的GNSS/INS松组合定位原理及流程示意图Figure 2 Principle and flow diagram of carrier-based GNSS/INS loose combination positioning
1.2 基于组合定位结果的里程恢复
通过上述1.1中组合定位结果得到的是高采样(一般为200 Hz)、离散的定位结果,为进一步获得里程值,需在这些离散点结果的基础上将其重构成连续的里程线段。考虑到高精度定位结果的采样间隔为200 Hz,在正常车载定位速度下(100 km以内),5 ms采样间隔的行驶距离最大为0.139 m,因此采用直线连接即可较准确地恢复出两点之间的距离。在此基础上,进一步将局部线段的距离求和即可获得里程Lp:

(4)
其中,i表示第i个定位点,n表示总的定位点数。
在真实路测环境下卫星观测可能会受到楼宇、林荫、隧道等影响,导致GNSS差分定位无法获得高精度的定位解,通过与INS组合的事后正反向平滑解算,能够在GNSS短时失效时,维持一定的定位精度。因此,真实路测时应尽量避免经过长隧道等长时间GNSS拒止场景。
2 手机终端计程的误差分析
为了验证智能手机终端定位误差对计程结果的影响,本文选取东南大学体育场跑道进行计程实验。该实验场跑道有明确的跑道路线,但在地图上无道路信息,即实际行走时无电子地图可用于匹配,因此可作为未知道路场景对智能手机的计程精度进行分析和评估。实验时持手机和组合导航设备沿跑道中的一条跑道缓慢步行,在百度地图上绘制轨迹并采集组合导航数据,最终行走一圈后回到原点。为了获取跑道的真实长度,采用50 m卷尺沿跑道进行了长度测量,实际测量结果为390.50 m。需要说明的是,使用卷尺在弯道处进行长度测量可能存在少许测量误差,但通过多次测量检核误差在0.5 m以内。将智能手机的计程结果和组合定位的计程解算结果与该结果进行对比,可得到相应的计程误差。体育场跑道及周边环境如图3(a),计程轨迹如图3(b)。可以看出,图中真实轨迹明显出现定位点跳变,轨迹参差不齐。在图3左侧区域,定位点明显凹陷。经与现场实验环境比对,发现左侧区域有浓密的林荫遮挡,导致手机定位存在较大的偏差。回到原点后,手机端计程检测地图app显示为376 m,与真实里程相比误差为-14.5 m,误差率为-3.72%。

图3 体育场跑道环境及手机计程误差实验图Figure 3 Mobile phone mileage error chart based on stadium runway environment
图4(a)展示了组合定位的结果及其地图显示,其中与地图中跑道不重合是由于地图投影角度误差导致。可以看出相比图3(b),组合定位的结果更为连续,与客观结果更加符合。其里程计算的情况结果如图4(b),其结果为392.5 m,与卷尺测量结果相比,其相对计程精度为0.51%。
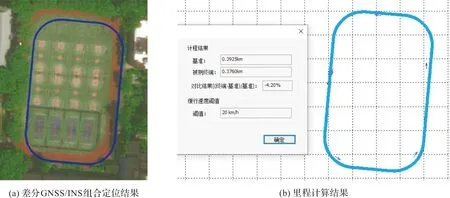
图4 基于差分GNSS/INS组合定位结果及计程解算结果Figure 4 Differential GNSS/INS positioning and corresponding mileage calculation result
3 里程恢复及计程检测实验
为了评估计程检测系统在真实道路环境下的工作性能,在南京城区选取了两个典型场景进行实验,主要为建筑遮挡和林荫遮挡的两段道路,如图5。实验时,GNSS天线架设于车顶,计程手机置于车内的天线正下方位置,在同一起点同时开启GNSS/INS组合导航数据采集和手机端计程,以保证两者实际经过的里程一致。两段实验均由静态条件下启动计程,车辆停止后结束计程。驾驶车辆在每种环境下行驶距离3~4 km,分别评估每段里程的误差率。实验采用的手机为红米K30,手机端定位计程软件为百度地图。

图5 城区环境实验轨迹Figure 5 Experimental track in urban environment
图6展示了基于高精度载波GNSS/INS组合定位及里程恢复在地图上的局部放大效果,可以看出在城市建筑遮挡和林荫遮挡综合影响环境下,组合定位结果与实际道路具有较好的一致性,在高楼和浓密林荫的大角度转弯区域也能获得平滑的定位结果,表明基于载波GNSS/INS组合定位,可以在城市环境下为网约车检测提供里程基准。

图6 组合定位及里程恢复局部放大效果Figure 6 Partial magnification of positioning and mileage recovery
两组实验中,基于载波GNSS/INS组合定位恢复的基准里程和手机端地图产生的里程如表2,从中计算可得,在城区环境典型建筑遮挡和林荫遮挡定位条件下,手机地图计程误差分别为1.02%和0.25%,误差比例符合计量要求(-4%~1%)。表2中结果进行对比分析,由于手机内置的电子地图包含了城区道路的先验里程信息,因此依靠地图匹配能在一定程度上弥补手机定位不准的不足;而在未知道路信息环境下,无法利用先验道路信息进行里程计算,因此可能造成较大的计程误差。

表2 组合定位和手机计程结果对比
4 结 论
本文针对智能手机等网约车计程终端的计程检测问题,研究了基于GNSS/INS组合定位恢复里程的计程检测技术,利用GNSS载波高精度差分定位和INS的组合定位技术,在真实道路环境下获得连续、高精度、高采样的定位点,从而恢复出精确的里程信息,为网约车终端在真实行驶环境下的计程检测提供基准。实验结果表明,在城市典型环境下,组合定位结果与实际道路具有较好的一致性,可在城市环境下为网约车计程检测提供里程基准;在建筑遮挡和林荫遮挡两种环境实验中,手机地图计程误差分别为1.02%和0.25%,满足网约车计程规范要求。但在未知道路信息环境下,由于计程终端的定位误差且无法利用先验道路信息进行里程计算,可能造成较大的计程误差。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
法律方法(2022年2期)2022-10-20
汽车实用技术(2022年14期)2022-07-30
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
山西青年(2020年3期)2020-12-08
活力(2019年19期)2020-01-06
活力(2019年17期)2019-11-26
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14