
实景建筑物模型快速批量单体化的方案探讨
2022-05-17 05:26龚高太史与正张淑玲
城市建设理论研究(电子版) 2022年3期
龚高太 王 剑 史与正 张淑玲
湖南省地质地理信息所 湖南 长沙 410000
开展实景三维中国建设,是“十四五”时期基础测绘转型升级发展的重要任务之一,“十四五基础测绘规划”要求:“推动传统单一比例尺数据库向实体化、一体化时空数据库转变,推动实景三维中国建设”[4]。显而易见,实景三维数据是未来应用最广泛的基础测绘成果之一,正是当前的研究热点。而目前,湖南正在开展以“真实、立体、时序化展示自然资源现状和自然地理格局”为核心的实景三维湖南建设,为自然资源管理和“三高四新”战略实施提供基础地理信息保障。
利用倾斜模型还原真实场景,是实现三维实景最便捷的方式,但这种三维倾斜模型是连续不规则三角网结构的整体,是地形表面的一张皮,即mesh模型,无法赋以属性信息和查询统计,使得目前的三维模型“中看不中用”,使倾斜摄影三维模型仅仅局限于浏览漫游。实现倾斜实景三维模型的单体化、结构化,才能拓宽三维模型应用的深度和广度,为空间管理和决策提供基底数据[2]。
目前应用较为广泛的单体化方法主要有“ID单体化”、“参数单体化”、“逻辑单体化”,这些方法只是对mesh模型的三角格网表象上的单体化,未真正实现分割独立[1]。市面上真正实现三维模型单体化的软件也很多,一般是基于倾斜模型的基底,利用第三方建模软件或插件完成单体化建模,使用空三后的影像自动贴附纹理,使模型高度还原真实[3],但无论何种工艺,都需要大量的人工参与,费事费力,成本高昂。因此,在建设“实景三维中国”的大环境的推动下,是否能有一种快捷、简单的方法来实现基于倾斜摄影技术实现建(构)筑物快速批量单体化,为此,我们对现有的设备、技术进行研究分析,探讨出一套可行性的方案。
1 技术路线
该技术方法主要基于倾斜摄影测量技术,利用多旋翼电动无人机搭载倾斜相机,设计合理的全测区航线,航飞多角度获取目标对象的高清晰影像数据,由于航飞高度、摄影角度的限制,需要结合能获取位置信息的微型无人机对底商、树木遮挡处进行影像加密;将影像数据、曝光位置、姿态信息进行严密的空中三角测量,得到影像间的位置关系,每三张影像得到一个特征点信息,进而得到海量的高密度高精度的点云数据;通过除噪,抽稀等点云数据预处理后,进行点云分类,通过算法,筛选出地表建筑物的点云数据,通过点云拟合不规则三角格网,形成建筑物白模,通过空中三角测量后的纹理信息可与白模完美贴合,最终实现建筑物批量的单体化。技术路线如图1所示。

图1 快速批量单体化技术路线
2 实施方法
根据技术路线要求,主要的工作分为源数据获取、空中三角测量、点云数据生产、点云分类和模型构建。
2.1 源数据获取
采用多旋翼无人机搭载五拼相机从高空对建筑进行规范航线飞行的等距航拍(图2),实现高清影像数据采集,为获取清晰的影像数据,最终获得质量较好的模型,根据影像分辨率与航高的关系。

图2 无人机航线飞行
式中:
H——航高,单位为米(m);
f——镜头焦距,单位为毫米(mm);
a——像元尺寸,单位为毫米(mm);
GSD——地面分辨率,单位为米(m)。
地面分辨率与航高关系密切,根据项目要求,明确地面分辨率值,再确定航高。飞行高度决定了拍摄影像的地面分辨率,飞得越高,地面分辨率越小。镜头焦距和像元为常数,因此飞行高度越高,GSD越大,成正比。根据试验,当GSD为2cm时,模型的表现力丰富,精度较高,完全能满足要求。
在树木茂密、有广告遮挡或底商模糊的区域,可使用能采集照片位置信息的微型无人机进行加密环绕飞行,完成照片补拍。此时,无论是五拼相机还是补拍的单镜头相机的照片,都具有明确的pos位置信息和姿态信息,实现相对位置的一致性,如果对建筑物地理位置精度要求较高时,可在地面布设适量的像控点标靶,采集像控点坐标值。

图3 加密环绕飞行
2.2 空中三角测量约束位置关系
采用光速法局域网平差空中三角测量,以摄影时目标点、相应像点和摄站点三点共线条件所建立的每条空间光线作为整体平差运算中的基本单元的空中三角测量,实现垂直影像和倾斜影像同时导入参与空三计算。经过提取特征点、提取同名像对、相对定向、匹配连接点、区域网平差等步骤的运算处理,得到摄区空中三角测量成果。一个特征点的提取至少需要三个不同位置的照片进行匹配获得。计算机通过识别和匹配拍摄的多张照片中相同的特征点进行彼此匹配对齐后进行拼接。特征点为图像中选取的比较有代表性的点,比如在图像中角点、边缘,在不同的图像之间的辨识度更强,所以这些位置多选取为特征点。
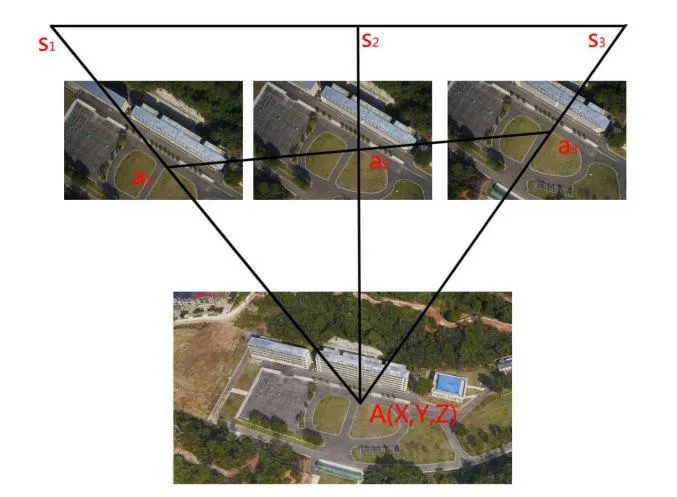
图4 特征点的匹配
2.3 点云数据生产
空中三角测量完成后,会提取海量的具有精准位置信息的特征点,这些特征点赋予了照片的纹理信息,既形成了有纹理信息的彩色点云。这些点云信息最终以las格式输出。在点云数据生产时,采样距离决定了点云的密度,也决定了建筑物最终表达的精细程度。此时的点云数据包含的内容为全要素,而且有大量的噪点,需要进行数据预处理。一方面需要绘制镶嵌线,使点云接边处过度自然,另一方面需要进行噪声滤波,这些噪声点包括有高于或低于地面的、孤立的、不成群的噪声点和与真实地表高差较小的、与地面点混合在一起的噪声点。
2.4 点云分类提取建筑物
将预处理后的点云数据导入专业的点云数据处理软件进行点云分类操作,如Terrasolid软件。
点云分类是基于点和点之间的相对关系来进行的,将点云分类到不同的点云集,同一个点云集具有相似或相同的属性。空间中所有的点都是有三维坐标的。算法的基础是构面(也就是某一个点和附近的点进行构面,再进行分析),建筑算法对建筑物屋顶上形成平面的点进行分类。算法要求地面点已经提前分类好。建议将地面以上的点分类为单独的类,以便该类包含建筑屋顶的地面以上高程范围内的点。算法从地面类中的空白区域开始,并尝试在这些区域上方的平面上查找点。
通过面积来控制建筑物的选取,可有效的避免地面上的树误入建筑物类中。如图5所示,从大类地面类中,提取面积大于40m2的点云存放在建筑物类层中,实现建筑物点云的批量提取。点云分类参数需多次反复试验,确定最终合理参数,以防止错层数据产生。

图5 建筑物点云分类
2.5 批量构建白模,赋纹理,建精模
通过点云构建模型主要是将点云网格化,点云拟合成海量的不规则三角网(TIN),而不规则三角网能很好的表现建筑物的细部变化,从而将建筑物的结构精准呈现,但单体化的建筑物模型为了结构简单,需要对一些装饰物进行删减,如空调、窗台,装饰柱可融于墙体,使用纹理的方式表达。由于纹理信息是经过空中三角测量后,有正确的位置信息,因此纹理化影像会与建筑物结构很好的贴合,但部分底商模型因树遮挡,纹理失真,此时则需要补真实场景照片,或从相邻相似地物上替代纹理。
当模型单体化所要表达的精细程度,可根据《城市信息模型(CIM)基础平台技术导则》(修订版)中的定级,其中分7级,III级(标准模型)、IV级(精细模型)是激光雷达、倾斜摄影方式建模后的单体化标准,其规定了表面凹凸结构边长分别大于等于0.2m(IV级)和0.5m(IV级)。
3 关键技术分析
使用该项技术路线实现建筑物的快速批量有几个关键技术需要把握:
影像数据采集的完整性。受自然条件的影响,使用无人机航拍对建筑物的上层结构能很好的获取,但是对于底商、或受高大的树木、广告牌遮挡的区域的信息采集,往往生成的点云是一片大的空洞,本文采用大疆精灵无人机进行地面容易遮挡的区域进行信息补充采集,是一种可行的方案,但也存在问题,在数据处理时,不同航摄仪采集的数据进行空中三角测量时计算时间消耗过大。加大航测重叠度,或后期使用修模软件进行局部修改,也可进行尝试。
点云分类的准确性。点云分类是使用算法完成,需要多次参数设置,达到最佳的提取方案,需要技术员对点云分类有较强的算法理解。 否则点云分类产生的成果容易建筑物丢失或,有树木、田坎等多余数据。
点云构建模型的面简单化。建筑物的快速批量单体化,就是实现mesh模型三角格网的简单化,实现单一建筑物的快速提取、快速表达。在建筑物表面,往往会附着各种电线、外挂设备,或者墙面上用于装饰的凸起,需要将墙面与凸起的距离作为变量,一定距离以内,不作为结构变化节点,这个变量需要。同时,利用纹理的表达去替代非主要建筑结构,用极少面表达建筑物,是点云构面时,需要重点解决的问题。
单体化的最终价值是为实现实体的语义化服务的。合理建立单体化模型拓扑关系,是为后续建立满足社会基础应用所需要的结构化通用建筑物模型编码提供重要的保障,这些拓扑关系的搭建除了平面结构的搭建,还包括垂直方向的结构搭建,还要考虑部件分割,部件融合带来的拓扑关系的改变。因此单体化不仅需要美观,其拓扑关系应梳理清楚,本文不做讨论。
4 结语
基于无人机倾斜摄影三维模型的建筑物快速批量单体化是近年来比较热门的技术课题,但实现起来具有相当的难度,随着全国各城市耗巨资投入实景三维城市项目的运作,必将会使该项技术得到攻克以及长足的发展。
猜你喜欢
储能科学与技术(2022年2期)2022-02-19
煤(2022年2期)2022-02-17
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
保健与生活(2019年7期)2019-07-31
小资CHIC!ELEGANCE(2018年33期)2018-11-08
三联生活周刊(2017年48期)2017-11-25
Coco薇(2017年8期)2017-08-03
课堂内外·教师版(2017年3期)2017-04-13
汽车之友(2016年15期)2016-08-23
