
基于共址MIMO雷达组网系统的机会协同目标跟踪方法
2022-05-24 06:11何子述
空天防御 2022年1期
何子述,苏 洋,程 婷
(成都电子科技大学信息与通信工程学院,四川成都, 611731)
0 引言
与传统单基地雷达相比,组网雷达系统可以使用不同视角的雷达节点来对目标进行检测,从而得到关于目标更充分的信息。组网雷达同时还具有波形分集、抗截获、抗干扰等优点,因此,组网雷达系统引起了广泛的关注并成为当前的研究热点。作为传统相控阵雷达,共址MIMO雷达在慢速目标和弱目标检测、定位精度和低截获概率等方面均具有明显优势。共址MIMO雷达中,各个子阵之间发射相互正交的波形,每个子阵中的阵元个数可随着子阵个数变化,从而改变发射波束宽度。因此,共址MIMO雷达在多目标跟踪中具有极大的灵活性,多目标可以同时被一个足够宽的发射波束探测或者被窄波束分时探测。对于共址MIMO 雷达组网系统,多目标跟踪中的自由度进一步提升,为机会协同目标跟踪提供了可能。基于共址MIMO 雷达组网系统,如何有效地在多目标跟踪任务上分配系统资源,成为资源管理领域的新问题。
雷达资源管理问题起源于相控阵雷达系统。对于相控阵雷达的时间和能量资源管理,文献[8]提出了一种基于交互多模型概率数据关联的自适应采样周期和发射能量方法。此外,发射波形也可以自适应改变。文献[9]给出了在跟踪系统中波形优化选择问题的闭合解。文献[10]中考虑杂波环境,提出机动目标跟踪过程中自适应发射波形的方法。针对共址MIMO 雷达系统,文献[4]中提出了一种能量分配策略用于优化最差目标的跟踪精度,本文的工作进一步拓展到考虑杂波环境的情况。考虑到每个被跟踪目标可能存在不同的跟踪精度要求,文献[12]提出一种基于多精度的功率分配方法。文献[13]提出一种联合波束波形参数优化的策略,该方法通过自适应调整发射波形的参数和能量,最优化最差目标的跟踪精度。
与单基地雷达相比,在组网雷达系统中激活节点可以自适应选择实现机会协同工作,从而增加了资源管理的自由度。文献[14]提出一种用于多目标跟踪的自适应雷达节点分配策略,其中雷达节点以及雷达和目标之间的分配关系均可自适应调整。文献[15]提出一种联合节点选择和功率分配的策略,用于提升最差目标的跟踪精度。文献[16]则提出一种协同的目标分配和驻留时间管理方法。对于共址MIMO 雷达组网系统,文献[17]提出一种联合波束选择和功率分配的策略,其目的仍然是改善最差目标的跟踪精度。文献[18]则提出一种鲁棒的资源分配策略,其目的是在保证预期的跟踪精度性能的条件下,极小化系统资源消耗量。文献[19]提出一种新的基于多跟踪精度的联合波束和功率调度的算法,该算法优化了多目标的总体跟踪精度。
尽管现有工作对组网雷达系统的资源管理做出了重要贡献,但在多目标跟踪背景下的机会协同跟踪方面仍然存在需要进一步解决的问题。首先,发射波形的种类及参数会影响到目标的量测精度,进而影响到目标跟踪性能,因此在自适应协同目标跟踪中需要考虑发射波形种类及参数。其次,组网雷达系统的时间资源管理即工作周期的选择,对于决定系统资源消耗的频率以及跟踪性能均有重要作用,也需要纳入自适应协同目标跟踪过程中。
本文建立了联合发射波形种类、波形参数和空时资源分配的优化问题模型。通过求解该优化问题,提出了一种基于共址MIMO雷达系统的机会协同目标跟踪算法,实现了机会协同目标跟踪过程中系统工作周期、激活节点、节点和目标分配关系以及被激活节点工作参数的配置,并通过仿真验证了本文所提算法的有效性。
1 系统模型
考虑一个拥有个共址MIMO 雷达节点的组网雷达系统,其中第个节点的位置为(x,y),并且将雷达节点集合记作={1,2,…,}。假设空域中存在个目标,目标集合表示为={1,2,…,}。将共址MIMO 雷达节点的子阵划分个数记为K,那么,时刻第个子阵的发射波形可表示为

图1给出了组网雷达系统机会协同目标跟踪的系统框架示意图。各个工作时刻,融合中心将获得来自多个雷达节点的量测信息,进行当前时刻的目标状态估计和更新;随后,基于滤波和融合结果,对下一时刻采取不同协同探测模式和工作参数将获得的多目标跟踪性能及系统资源消耗量进行预测;根据预测结果,机会协同控制策略模块将决定下一时刻采纳的协同探测模式及协同节点的工作参数,并将其送入系统前端,控制整个系统按照决定的方式进行实际探测。在反馈的信息中,包括整个系统下一次的探测时刻、机会协同目标跟踪的雷达节点、协同节点的子阵划分个数、协同节点的发射能量、协同节点的发射波形以及波形参数。需要指出的是,在各个探测时刻并非所有雷达节点参与探测,而是按照一定的准则选择最优节点探测。因此,多雷达节点是按照一定的机会实施协同探测,这就是机会协同的含义。

图1 组网雷达系统机会协同目标跟踪示意图Fig.1 Schematic diagram of opportunistic cooperative target tracking by radar networking system
2 MIMO 雷达组网系统机会协同目标跟踪算法

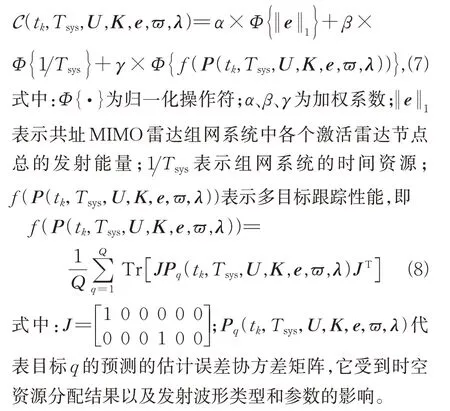
这里考虑共址MIMO 雷达组网系统的机会协同多目标跟踪,目的是为了最小化雷达组网系统的整体资源消耗,同时最大化目标跟踪性能。因此,优化问题的目标函数需要同时包含组网雷达系统的资源消耗和多目标跟踪性能。其中,组网雷达系统资源消耗包含能量资源和时间资源。因此,可建立如下综合代价函数,并将其作为目标函数:
在机会协同目标跟踪过程中必须满足一定的约束条件,包括成功照射和成功检测条件,即每个被分配去跟踪某个目标的雷达节点,其发射波束必须能照射到该目标,同时,为了获得该目标的有效量测,对其检测概率必须超过给定的门限值。基于此,可建立如下优化问题模型:

式中:约束条件1 表示传感器需要照射到目标;约束条件2 表示传感器需要检测到目标;约束条件3表示传感器可以选择跟踪或者不跟踪目标。
基于上述优化问题模型,需要设计一种高效的求解算法,以得到最优的可控参数。由于和等离散变量的存在,优化问题OP 属于混合整数的非凸优化问题。针对这类优化问题,理论上穷举法可以得到全局最优解,但是其时间复杂度随目标个数和传感器个数呈现指数增长。此外,传统的凸优化算法也无法应用于混合整数非凸问题的求解。因此,这里提出一种基于粒子群算法的求解方法,以实现优化问题OP的高效求解,从而获得MIMO 雷达组网系统机会协同目标跟踪算法,图2 给出了该算法的具体流程。

图2 共址MIMO雷达组网系统机会协同目标跟踪算法流程Fig.2 Flow chart of opportunistic cooperative target tracking algorithm for the co-located MIMO radar networking system
3 仿真分析
假设场景中存在3 个目标,2 个共址MIMO 雷达构建组网雷达系统,目标的运动航迹以及子雷达的位置如图3 所示。目标1 从0 时刻出现,目标2 和3 在25 s 时出现,整个跟踪时间为100 s。假设系统工作周期选取集合为∈{0.5,1,1.5,2,2.5,3}(单位为s),子阵划分个数可以在1、8、16、32和64中选择,波形库中存在3 种不同的波形可选,激活雷达的发射能量可以在0.1~10 J 的范围中选择。采用本文提出的共址MIMO 雷达组网机会协同目标跟踪算法进行目标跟踪。子阵划分个数如图4 所示,其中红色叉号表示此时该传感器节点没有被激活。从图中可以看出,所提算法可以自适应地选择传感器进行激活。为了进一步展示多传感器在多目标跟踪时的机会协同探测,图5 给出了各个目标的传感器选择和功率分配结果。从中可以看出,所提算法可以自适应地选择激活节点的发射能量,并且可以根据多目标相对于多节点的相对位置关系,自适应地决策是否需要选择多个节点来对目标进行协同探测。

图3 目标航迹及雷达节点位置Fig.3 Target tracks and radar node positions

图4 传感器节点的子阵划分个数Fig.4 Subarray division number of sensor nodes

图5 目标-传感器选择及功率分配Fig.5 Target-sensor selection and power distribution
为了进一步说明本文所提机会协同目标跟踪算法的优势,将其综合代价与其余四种基准算法的综合代价进行对比,包括固定发射波形的算法、固定发射能量的算法、固定节点选择的算法和固定采样周期的算法。图6给出了对比结果,可以看到,本文所提算法能获得最低的综合代价。

图6 不同算法综合代价对比Fig.6 Comparison of comprehensive costs of different algorithms
4 结论
针对共址MIMO 雷达机会协同目标跟踪,本文提出了一种联合波形、波形参数选择和时空资源管理的优化问题模型。在该模型中,目标函数不仅考虑了多目标总体跟踪精度,还考虑了系统的时空资源消耗量,其中波形种类和参数对跟踪精度的影响也考虑入内。为了求解上述优化问题,提出一种基于粒子群优化算法的机会协同目标跟踪算法,实现系统工作周期、机会协同工作节点、激活雷达节点子阵划分个数、发射能量、发射波形和波形参数的自适应选择。仿真结果表明了所提算法的有效性,与其余基准算法相比综合代价最小。
猜你喜欢
航空学报(2022年7期)2022-09-05
汽车零部件(2022年7期)2022-08-03
科普童话·百科探秘(2020年5期)2020-09-14
卫星电视与宽带多媒体(2020年7期)2020-06-19
汽车与驾驶维修(维修版)(2020年2期)2020-01-07
计算机辅助工程(2019年3期)2019-10-21
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
小学生导刊(高年级)(2016年11期)2016-11-14
少年科学(2015年7期)2015-08-13
现代电子技术(2009年8期)2009-06-25
