基于SSD算法的光伏板表面异物的识别研究
2022-05-30 10:48刘瑞凤杨雅君张文慧王潇璇宋美
电脑知识与技术 2022年29期
刘瑞凤 杨雅君 张文慧 王潇璇 宋美

摘要:针对现存的对光伏板进行人工运维时效率低、成本高的问题,提出了一种结合无人机与目标检测算法对光伏板表面异物进行智能检测的方法。以太阳能光伏板表面异物为检测目标,输入无人机对光伏电站的巡航图片数据,利用目标检测SSD算法进行训练检测。结果表明,此算法对异物识别的交并比在75%以上,准确性较高,具有很好的实用性。最后借助无人机巡航和智能算法,构建光伏板的智能运维系统,从而提高光伏板的实际使用效率。
关键词:光伏板表面异物;无人机;目标检测;SSD算法;交并比
中图分类号:TP183 文献标识码:A
文章编号:1009-3044(2022)29-0024-03
1 引言
近几年,随着光伏产业的不断发展,光伏板的检查与维修工作给光伏电厂的运营维护带来了较大压力。目前,人员值守及特定设备巡检是光伏电站的主要运维方式,這样的巡检方式存在故障排查时间长,准确率较低等问题。近年来,目标检测方法发展迅速,产生了快速和高度准确的方法,如R-CNN、Faster R-CNN、YOLO系列算法和SSD算法。由于传统的运维模式对光伏板的检测和维护是十分困难、烦琐的,因此将目标检测的智能诊断方法应用在光伏板表面异物识别中具有重大意义。
在光伏板的故障研究中,国外对光伏组件与发电效率之间关系的理论研究较为系统,在清洁方面也主要注重对材料的探究[1-2],对表面异物的智能检测研究较少。国内研究中,王雪[3]提出了一种改进的概率故障树分析方法,结合太阳能系统专家经验和IF-THEN推理规则,提出一类面向光伏故障诊断和监控的系统理论,效果显著。李红涛[4]等人提出使用最小二乘支持向量回归(Ls-SVR)方法对光伏组件进行故障检测,采用现有实验数据对上述方法进行验证,效果良好。解连港[5]等人提出能够自动进行光伏板故障检测, 输出故障图像、故障类别和故障位置的方法,便于光伏发电站的工作人员及时确定故障信息,进行光伏板维修。
总体来看,光伏板故障的识别技术正在逐步发展,但基于 SSD 算法进行光伏板检修应用较少,普及不够。此课题主要研究应用于可见光下的光伏板表面异物的检测,根据无人机巡航拍摄后的照片进行图像采集形成数据集,利用目标检测SSD算法进行学习与检测,进而对图像进行故障识别,识别完成后,对故障类型与位置信息进行自动标记,以便启动机器人对光伏板表面异物所在区域进行清扫,从而达到高效解决光伏板异物影响光伏板运行的问题。
2 数据来源
项目以某地厂房屋顶平铺式光伏板为研究对象,借助无人机,在该光伏发电阵地上方按固定航线进行巡航,无人机在可见光下拍摄视频和图片,记录可见光下光伏板表面情况。
3 模型方法
3.1 SSD算法网络结构
SSD网络架构主要由Vgg16网络和大小不同的卷积层组成,一张图片上可能有多个目标需要检测,用卷积层替代全连接层,相应地,最后做预测时也需要使用卷积层。
SSD算法最初的输入数据为无人机拍摄的可见光原始图像,经过Vgg16基础特征提取层后,依次使用不同的卷积层进行处理。
此次模型基于Tensorflow Object Detection API的Single Shot MultiBox Detector算法,简称 SSD 算法,最初由刘伟[6]等人提出。在SSD算法中,不同尺度的先验框应用在不同的卷积层中,基于此进行分类和回归。SSD 算法将Faster R-CNN 算法的锚点机制和 YOLO 算法的回归思想相结合,一次即可完成网络训练,并且定位精度和分类精度相比YOLO都有大幅度提高。SSD的损失函数包含两项:(1)预测类别损失;(2)预测位置偏移量损失值。即类别损失和位置偏移量损失的加权和:
[L(x,c,l,g)=1N(Lconf(x,c)+αLloc(x,l,g))] (1)
上式中:N是匹配默认框的个数(包括正样本和负样本,利用IoU计算样本为正负样本,当IoU大于阈值时为正样本,反之为负样本),[α]表示位置偏移量损失与类别损失的比例,默认为1;位置偏移量损失是[smoothL1]损失(是预测框[l]和真实标签值框[g]参数之间的损失):
[smoothL1]损失定义为:
[smoothL1(x)=0.5x2x-0.5,,ifx<1otherwise] (2)
故[Lloc]损失函数定义为:
[Lloc(x,l,g)=i∈PosNm∈cx,cy,w,hxkijsmoothL1(lim-gmj∧)] (3)
其中,
[g∧cxj=(gcxj-dcxi)dwi] [g∧cyj=(gcyj-dcyi)dhi]
[g∧wj=log(gwjdwj)] [g∧hj=log(ghjdhj)]
类别损失是softmax对多类别的损失:
[Lconf(x,c)=i∈PosNxpijlog(c∧pi)-i∈Neglog(c∧0i)] (4)
其中,[c∧pi=exp(cpi)pexp(cpi)],[xpij=1],则第[i]个默认框与类别[p]的第[j]个真实框进行匹配,可以得到[ixpij≥1],即至少有一个可以匹配上第[j]个真实标签框。
目前SSD 算法在交通领域应用广泛,主要为车辆与行人检测方面[7-9],在光伏板清洁和检修方面,SSD 智能检测算法应用较少。
3.2 交并比(Intersection-over-Union,IoU)
交并比是目标检测中使用的一个指标,是产生的候选框与原标记框的交集与并集的比值。最理想情况是完全重叠,即比值为1。
SSD算法的匹配策略:SSD算法基于最大IoU匹配的原则,首先给每个anchor分配一个真实标签,通过anchor与Groundtruth box比较计算最佳重叠。当IoU大于0.5时,就认为是一个正样本,当IoU小于0.5时认为是负样本,对应计算公式为:
[IoU=Gt?DrGt?Dr] (5)
其中,[Gt](Ground Truth)为目标位置,[Dr](Detection Result)为检测结果。由于IoU算法判断后会产生大量重叠检验,故需运用非极大值抑制(NMS)选出交并比最大的候选框作为最终的检测结果。实现对多余结果进行选择。
4 实验过程
实验基于如下流程图,对数据集进行处理、训练,从而将新的拍摄图片导入检测系统中进行验证并得出实验结果。
4.1 实验数据准备
(1)将无人机采集的数据视频导入Adobe Premiere Pro CC 软件,进行初步剪辑处理,将视频中有异物片段和无异物片段进行分割,将有异物片段的视频序列按照6帧的步长导出为图片,最终共获得1363张有异物的图片数据。
(2)異物标记:使用Labellmg软件对样本表面的异物进行框选标记,生成对应的.xml文件,便于后续算法学习处理。
(3)数据划分:经过Labellmg软件标记后,生成对应的1363条xml文件,将1363条图片数据和1363条xml数据进行对应划分,其中2060条为训练数据,626条为测试数据。
4.2 实验过程
对无人机获取的数据进行学习训练,使用TensorFlow API中的SSD算法,正负样本比例大概为1:3。
将xml文件转为csv格式文件,将csv文件存储为record格式。将处理好的数据使用SSD算法进行学习训练,训练步数为30000步。基础网络、辅助卷积层、预测卷积层三部分是SSD算法的主体架构。
Vgg16网络是该算法训练时的基础网络,主要提取低级特征图,基础网络最后的特征映射图输入辅助卷积层,用来提取高尺度的特征映射图,最后通过预测卷积层,输出特征映射图的位置和分类信息。
在训练过程中,SSD算法将图像和每个目标的gt(原标记框)作为输入,根据长宽比和尺度在特征图单元上设置默认框,然后使用默认框预测检测到目标的4个偏移和类别概率。在进行预测时,首先用gt匹配所有的默认框。匹配的原则有两个:第一,对于图像中的每一个gt,找到比其相交处IoU最大的先验框,然后与之匹配;第二,如果一个gt的IoU大于某个阈值(一般是0.5),其余的默认框就与该gt匹配,匹配到的就是正样本,反之就是负样本。设置正样本,使正负样本的占比约为3:1,最后用正样本进行训练。在测试算法时,直接预测每个默认框的偏移量和每个类别的概率,然后用非最大抑制算法计算最终结果。
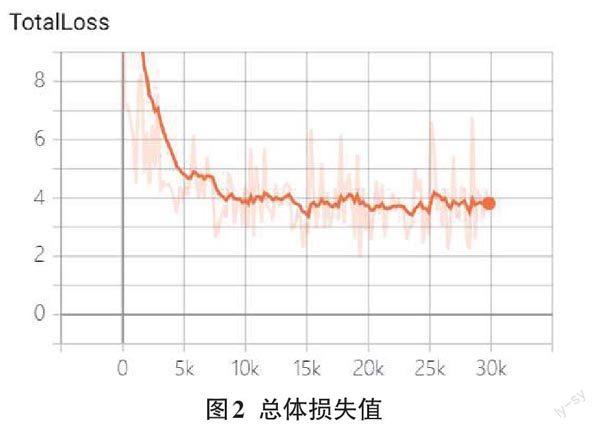
训练结束后,会保留近五次的训练模型,通过Tensorboard查看训练结果,将损失最小的模型作为最终的使用模型,保存为pbfile格式,进行实际应用。
5 结果分析与评价
通过Tensorflow自带的Tensorboard可视化界面,选取总体损失值较小的30000步下模型作为最终使用模型,用于实际检验。
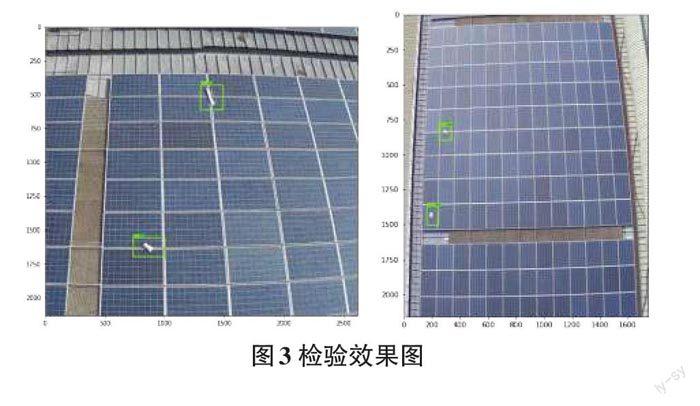
将新的拍摄图片导入检测系统中进行验证,得出实验结果。结果如图3所示。若新的拍摄图片出现异物,将会对异物进行框选,并标记交并比IOU,由测试结果反映,总体交并比在75%以上,具有很好的应用性。
6 结论
此项研究通过目标检测SSD算法借助无人机巡航得到可见光下光伏板的数据,共获得1363张有异物的图片数据,并对其进行标记转化为xml数据。不仅获得了充分的样本量,而且保证了数据的质量,提高了模型的学习效率。构建的模型能够在实际中进行检验和推广,增加了模型的可靠性。在模型建立后使用新的样本验证,通过表2得出模型准确率达到75%,说明模型的准确率比较高。因此借助可见光下光伏板智能运维诊断系统,可以减轻光伏板人工修理的困难,从而提高光伏板的使用效率,节省人力物力财力。
参考文献:
[1] Gassar A A A,Cha S H.Review of geographic information systems-based rooftop solar photovoltaic potential estimation approaches at urban scales[J].Applied Energy,2021,291:116817.
[2] Al Bakri H,Abu Elhaija W,Al Zyoud A.Solar photovoltaic panels performance improvement using active self-cleaning nanotechnology of SurfaShield G[J].Energy,2021,223:119908.
[3] 王雪.光伏监控中的故障诊断方法及应用[D].杭州:杭州电子科技大学,2017.
[4] 李红涛,李春来,杨立滨,等.最小二乘支持向量回归的光伏组件故障检测[J].电力电子技术,2018,52(9):97-100.
[5] 解连港,秦尉博,赵宁,等.一种光伏板故障检测识别方法、装置和无人机:CN111740699A[P].2020-10-02.
[6] Liu W,Anguelov D,Erhan D,et al.SSD:single shot MultiBox detector[EB/OL].2015:arXiv:1512.02325.https://arxiv.org/abs/1512.02325
[7] 陈冰曲,邓涛.基于改进型SSD算法的目标车辆检测研究[J].重庆理工大学学报(自然科学),2019,33(1):58-63,129.
[8] 李海翔.基于SSD的行人检测与跟踪方法研究[D].合肥:中国科学技术大学,2018.
[9] 杨帆,吴韶波.基于SSD的目标车辆检测算法研究[J].物联网技术,2021,11(6):19-22.
【通联编辑:唐一东】
猜你喜欢
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
科学与财富(2016年28期)2016-10-14
企业导报(2016年9期)2016-05-26
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22
现代电子技术(2015年14期)2015-07-22