一种基于改进DeepID2 网络的转子碰摩声发射信号识别方法*
2022-06-02 14:41杨伟博夏昌炜徐虹飞
电子器件 2022年1期
杨伟博 ,李 晶 ,赵 杰 ,夏昌炜 ,徐虹飞
(1.南京工程学院信息与通信工程学院,江苏 南京 211167;2.南京审计大学信息工程学院,江苏 南京 211815)
声发射(Acoustic Emission,AE)信号处理是声发射技术的重点研究内容,也是无损检测评估中的关键环节。声发射信号对结构内部损伤程度、类型和位置的识别是AE 检测技术研究的核心。声发射信号按照其产生的物理本质分为典型和二次型,传统的信号处理方法对此并没有区分。分别探讨这两种类型声发射信号在产生机理、传播特性和波形特征等方面的共性和特性,研究相应的AE 信号处理和分析方法,也是急需解决的问题。
声发射技术也是旋转机械碰摩故障的诊断方法之一。声发射技术拥有灵敏度高、频率响应范围宽、仪器适应强等特点。由于这些优良的特点,声发射技术为旋转机械碰摩故障检测开辟了新道路,也逐渐成为现在旋转机械碰摩故障诊断研究领域的研究热点[1]。
近些年来,卷积神经网络(Convolutional Neural Networks,CNN)被应用到了各种各样类型的声学特征识别模型里。但深度卷积神经网络在用于机械碰摩故障识别时存在一些弊端,由于是小数据集上的识别问题,所以常常出现梯度消失等问题[2]。在转子碰摩的声发射信号识别系统中,针对实验数据较少的特点,本文提出了一种能够使局部模型表达能力增强的卷积神经网络改进架构DeepID2 网络。首先,针对传统CNN 经常出现的梯度消失问题,把网络层的各层特征信息连接到一起,可有效避免边缘信息的损失,保留各层的信息特征;然后,提取转子碰摩故障信号的声谱图以及差分特征等多通道图像的输入特征与优化后的CNN 网络模型相适应;再利用包含各层信息的融合特征输入网络的全连接层,对转子碰摩故障信号进行分类识别。实验结果表明,提出的基于改进DeepID2 网络的转子碰摩故障信号识别算法识别性能有较大改善。
1 传统CNN 模型在小数据集上的识别问题
卷积神经网络主要由输入层,多个不同尺寸的按照一定顺序级联的卷积层+池化层、全连接层,最后的输出层[3]三大部分组成。CNN 网络的优点主要就在于其中卷积层的引入,相对于全连接层减少了所需权重参数个数,并且每一卷积层通过采用局部连接的权重矩阵(即卷积核,Convolutional Kernel)与输入数据进行卷积操作可以有效地提取保留输入数据的局部特征,因此通过卷积层所得到的输出数据也称为特征图。
一般来说,CNN 神经网络的低层卷积层需要尽可能保留原始输入数据的特征,所以它所提取的特征与原始输入数据更为接近。对于较顶层的高层卷积层而言,它的输入数据是低层卷积层的输出特征,CNN 正是通过这样逐层提取完成了全局特征的输出。但针对小数据集上的识别问题,传统CNN 经常会出现梯度消失问题。
DeepID2 网络[4]首先主要是应用于人脸验证等领域,它在人脸验证领域突破了99%的识别率。其结构与CNN 神经网络的结构相似,但DeepID2 网络采用一种隐含层的连接各个卷积层的输出,这样既考虑了局部特征,同时综合了全局特征,这可为改进CNN 架构提供思路。此外,DeepID2 在DeepID 的基础上,对目标函数增加了验证信号,将二者的加权和作为目标结果,考虑了类间差距,提升了识别的稳定性和准确性。
级联交叉通道参数化汇聚层(Cascaded Cross Channel Parametric Pooling Layer,CCCP)是卷积核尺寸为1×1 的卷积层。这样的卷积层可以实现跨通道信息交互和融合,可以抽象出更好的局部特征,并进一步提升网络的非线性能力。目前许多CNN 结构中都采用了CCCP 层,用来减少或增加特征图通道的维数,减小参数量[5]。所以,可引入了CCCP 层以减小特征图通道的数量,可以压缩特征信息并减少神经网络的参数数量。
2 基于改进CNN 的声发射信号识别
相比于图像信号,声音片段只有单通道,所以只能从声音片段中获得偏少的像素级信息,而且它们之间的局部相关性较强。由于传统的CNN 网络在对于输入数据的处理在每一层卷积后保留局部特征会丢失部分数据特征,因此CNN 网络最终的输出特征会缺失低层次特征。与此同时,传统CNN 的各卷积核及输出特征尺寸一般也会逐级减小,因此传统CNN 网络对于原本像素信息就少的声谱图经过网络输出后的特征信息维度会变得更低。
对于这个问题,在经过改进后的卷积神经网络里,把每个卷积层的输出特征进行连接成为一层使得最后输出特征结果既有局部特征又包含了全局特征,这样降低了传统CNN 网络中因池化降维而导致的一些边缘信息的损失[6],并保留了较多的特征信息。
本文将网络里各层卷积层的输出与网络的最后一层隐层进行直接连接,构建了最终的多尺寸特征,以及有监督的特征提取[7],它可以更好地保留不同维度的信息,这种特征在无监督的特征学习里[8]被广泛使用。同时对于每一层卷积层,都会接入一个CCCP 层作为最终卷积层的输出,用来压缩特征图的尺寸,通过添加此类分支连接并减少每层特征通道数量,最后一层隐层的特征包括了每个图层的特征且减小了与顶层尺寸的差异,因此在保留更多信息的同时减小了参数量。
对于碰摩信号分类问题,参照DeepID2 的网络连接方法,本文构造出了应用在碰摩识别问题的卷积神经网络结构。Kl为该网络第l层卷积层的卷积核,Xl为第l层的输入,那么可以得到第l层的特征图Fl的表达式:
式中:“*”表示卷积操作。(i,j)为l层像素索引。第l层卷积的输入特征图Yl是层内每个子特征图映射组成:

然后,通过将该层后连接的CCCP 层对特征图Yl进行压缩,计算公式为:
式中:C为该卷积核的数量,t′为CCCP 层的卷积核索引。Fl与Fl,cccp的特征图尺寸相同,却有着更少的通道数,从而压缩了信息和降低了维度。
新的特征图是由前三层的卷积层通过CCCP 层后进行提取得到的。然而由于顶层卷积特征图与前三层特征图在维度上的差异,所以需要按照式(4)来把特征图平展开成一维特征:

式(5)为顶层卷积图的一维特征函数:

式中:m,n表示第l层输入以及顶层卷积层的卷积核的尺寸。最后,可以把每个卷积层最后计算得到的一维特征和顶层卷积图的特征图进行拼接,即可计算出最后的融合特征Ffinal。输出特征图和顶层卷积图的特征图拼接,采用将展平的各层特征图累加的方式,最后可以计算出融合特征图Ffinal如式(6)所示:

由式(5)可知,Ffinal包含卷积层提取所得的全部特征图,然后这些通过计算得到的特征图作为融合特征输入图的全连接层进行分类和识别。改进的神经网络结构图包含有第1 卷积层、第1 池化层、第2 卷积层、第2 池化层、第3 卷积层、第3 池化层、全连接层和分类器。第1 卷积层采用卷积核64*2*2,第1池化层64*2*2,第2 卷积层采用卷积核96*2*2,2池化层96*2*20,第3 卷积层采用卷积核128*3*3,第3 池化层128*3*3。网络训练参数设定如下:batch=16,epoch=100,学习率λ=0.000 01,使用随机梯度下降算法进行优化。采用DeepID2 中的特征处理方式,将碰摩声发射信号的识别问题转成最小化交互熵损失函数:

式中:pl代表目标概率分布,代表预测概率分布。样本间距最大化的目标函数采用约束来正则化,本文采用以下基于L2 范数的损失函数:
式中:Yij=1 代表同类的碰摩声发射信号,Yij=-1 代表不同类的碰摩声发射信号,m为距离阈值,代表两种信号距离应当大于d。
在经过改进的网络结构中,因为使用的数据较少,同时网络拥有较多层数,致使在训练当中产生了较为严重的过拟合现象。为了避免这种情况出现,本文对所有卷积层以及全连接层都施加了Dropout,这种方法是由Hinton 所提出的,被称为Dropout[9]方法。此外,由于网络中各层的过拟合程度不一样,卷积层采用0.2 比例的Dropout,全连接层采用的比例为0.5。
3 碰摩声发射实验
3.1 数据采集实验过程
如图1(a)和图1(c)所示,本文实验系统由转子碰摩试验台,盖状导波板,调速器,声发射采集系统组成。如图3(d)所示,转子碰摩试验台是由三个具有滑动轴承的轴承座用于支撑转子,两个碰摩圆盘,碰摩螺钉组成。碰摩螺钉可以通过盖状导波板上螺孔指向转轴中心,并与圆盘侧面相接触。当转子以一定的转速旋转时,碰摩螺钉就会与碰摩圆盘发生碰摩,产生的碰摩声发射信号经由导波板被声发射传感器所接收,用于声源定位。可以通过调节碰摩螺钉旋入深度来模拟不同强度的碰摩。调速器实现电机0~10 000 rpm 范围的无极调速;为了降低由于介质不连续而引起的声发射波形畸变,在接触面之间填充耦合剂。导波板上有多个螺孔,可以模拟多个位置产生碰摩,孔间距离严格保持与碰摩圆盘之间距离一致。
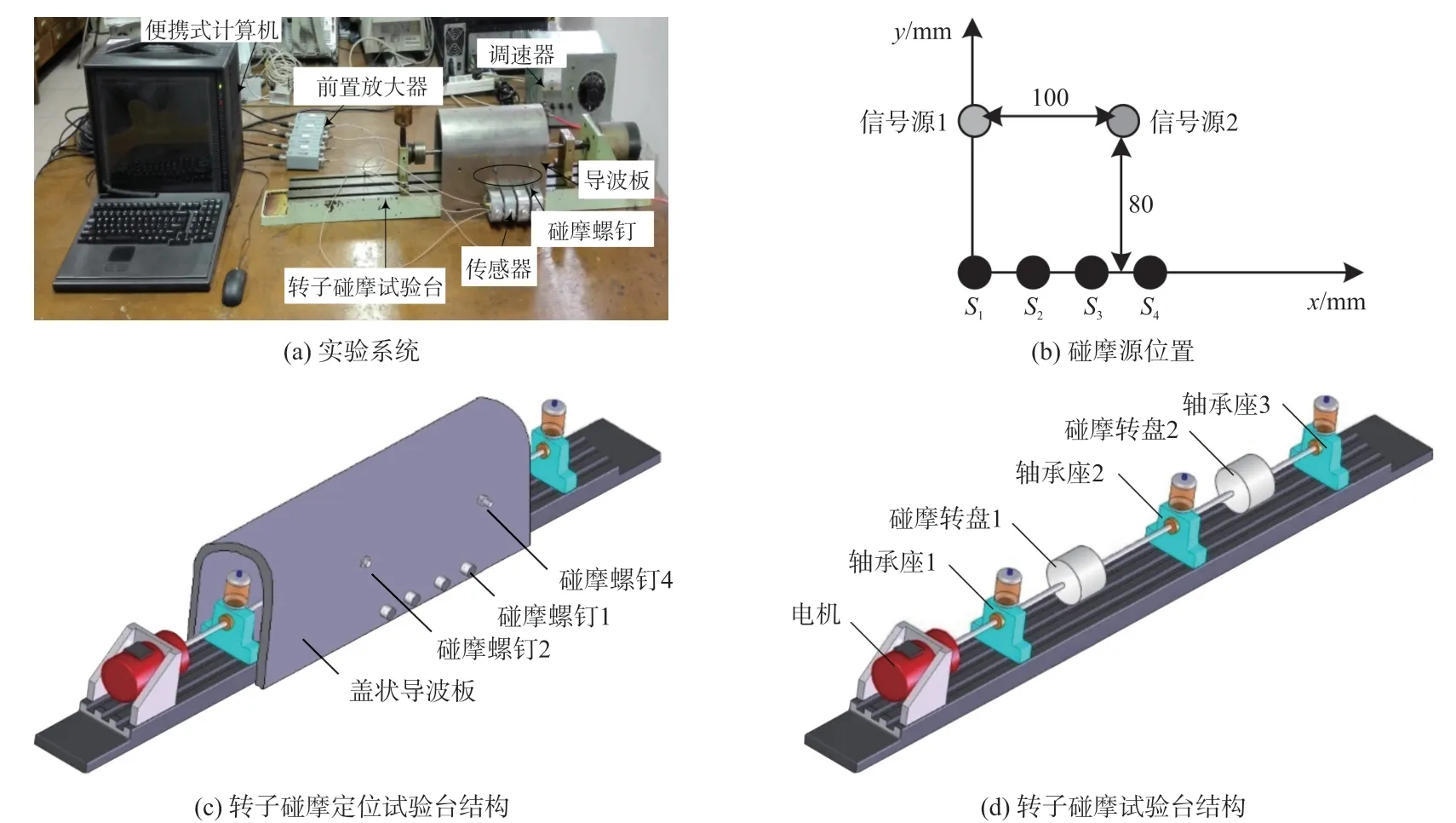
图1 碰摩声发射实验系统
声发射信号采集系统是由美国PAC 公司生产的内置两块PCI-2 声发射采集卡的Polar9300e 便携式计算机,频率范围60 kHz~1 000 kHz 的UT-1000 宽频AE 传感器和20 dB/40 dB/60 dB 三档可调前置放大器组成。声发射采集卡具有18 位A/D 分辨率,设置声发射信号采样频率为2 Mbyte/s,滤波器频带为0~200 kHz,AE 放大器增益为40 dB。
盖状导波板的材料为45 号钢,单侧面尺寸为500 mm×200 mm×10 mm。四个传感器由磁力夹固定在导波板单侧的底部,设置最左面的传感器位置为定位原点,转子的转速设定为350 r/min,弯曲波在导波板中传播速度为3 000 m/s。如图1(b)所示,在单侧导波板上定义(90°,40 mm)和(38°,120 mm)同时产生碰摩声源。相对阵列原点,远处碰摩的强度强于近处。为降低Lamb 波和边界反射波的混叠,实验采集碰摩初期信号。
3.2 实验结果与分析
实验中采取了700 条AE 信号作为实验数据,分别采样于转子运转在正常情况、局部碰摩和整周碰摩。每一条信号数据里包含512 000 个点,时间跨度为0.512 s,采用5 折交叉验证方式,其中560 条声发射信号选为训练样本,其余140 条信号作为测试样本。通过计算时序AE 信号采用帧长为512、帧移为50%、512 点FFT 频谱,可以得到其声谱图特征,在此基础上,使用Librosa[10]公式取得AE 信号的1 阶至5 阶差分特征,最后再将得到的声谱图与原声谱图图像对比,最终构成5 通道的图像输入特征。
本文实验采用Google 的Tensorflow 深度学习框架来搭建和训练神经网络。神经网络的训练和最终的收敛状态与超参数选择有着很大的影响,为了保证神经网络的泛化能力,在多次实验对比后,选择Dropout 比为0.2、动量为0.92、学习率为0.002 4,批大小为64,代数为50 作为网络超参数。
为使模型评估拥有较高的对比度,基于相同的五通道声谱图,将所提出的CNN 网络与其他6 种不同的分类器在转子碰摩AE 信号数据上进行比较。图2 为7 种分类器在理想无噪声环境下,对转子碰摩AE 信号识别的实验结果。
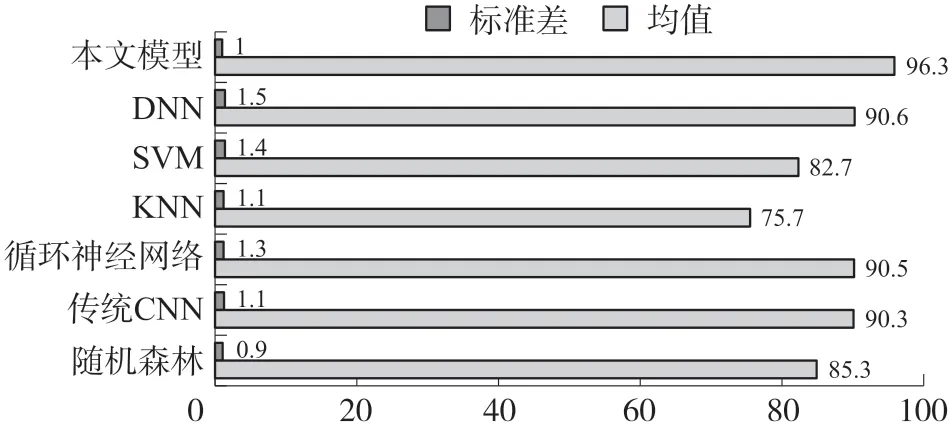
图2 不同分类器对转子碰摩AE 信号的识别率
与DNN[11]相比,改进的CNN 模型识别率均值提升了5.7%。两者都同为深层神经网络,但本文模型结构包含卷积层,严格意义上属于CNN 结构,但CNN 在针对处理二维图像数据时,以其特有的细粒度特征提取方式,可以提取出更为有效的特征,拥有更高的识别率,也能让数据在空间上整体与局部之间的关系更加适应,同时还继承了卷积神经网络的强鲁棒性。
和传统卷积神经网络[12]相比而言,通过连接各个卷积层的输出,融合多个层次的特征从而能在更大程度上保留特征信息是DeepID 网络[13]独有的结构。本文所采用的模型对DeepID 网络添加两层全连接层,使得网络在高维空间更好地刻画样本分布,通过贝叶斯分布器后可以很好地进行分化,区分融合特征,并添加Softmax 层[14-15],本文所采用的模型弥补了DeepID 只提取特征而不进行分类的缺点,它可以直接对转子碰摩AE 信号进行分类。因此,通过对比可知所提出的改进网络相比较传统CNN 提高了6.0%的识别率。
4 结语
本文对声发射信号的基于卷积神经网络的转子碰摩故障识别方法进行了研究,提出了一种改进的适用于转子碰摩故障识别的CNN 网络,利用DeepID 网络其特殊的网络连接方式,对CNN 网络结构进行了改进。实验结果显示,经过优化后的CNN 识别算法,相对于传统的CNN、DNN 等神经网络模型,识别率都有较好改善。
猜你喜欢
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
陶瓷学报(2021年3期)2021-07-22
化工装备技术(2021年1期)2021-03-09
电子制作(2019年13期)2020-01-14
科技创新导报(2019年20期)2019-12-10
电子制作(2019年19期)2019-11-23
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2019年24期)2019-02-23