基于Hough变换与SVM的高速公路车牌识别系统
2022-06-06 08:42曾夏明
西部交通科技 2022年3期
关键词:车牌识别




摘要:针对ETC车道车牌识别难的问题,文章介绍了一套适用于人工车道与ETC车道的车牌自动识别系统。该系统采用HSV色彩分割与连通域分析相结合的方式来检测车牌区域,通过一种基于Hough变换与像素点投影的方法来实现车牌字符的倾斜校正与分割,并采用SVM分类器对车牌字符进行识别。测试结果表明,该车牌识别系统正确识别率高、识别速度快,且能够有效地校正车牌的倾斜,具有在实际场景中应用的可行性。
关键词:HSV;Hough变换;SVM;车牌识别
中图分类号:U491.5+12
0 引言
电子收费系统(Electronic Toll Collection,ETC)是一种快速且高度自动化的道路收费系统,其能够自动化地识别车辆信息,并计算往来车辆所需支付的道路使用费用。而随着ETC在全国的推广,如何提高通行车辆的识别效率成了有待进一步研究的问题。车牌识别技术是ETC的核心技术,也是智能交通系统中的关键技术[1]。车牌识别技术主要使用机器视觉技术来识别车牌和提取车牌上的信息,因其具有提高交通管理效率和行车速度以及降低成本等优势,被广泛运用于交通道路疏通、停车场收费管理、机场出入口车辆管理及高速公路违章车辆信息采集等领域。
车牌识别技术主要由三个内容组成:画面中车牌的定位、车牌字符的倾斜校正及字符识别[2]。其中车牌定位有基于边缘检测[3]、基于颜色分割[4]等方法。基于边缘检测的定位方法具有较好的降噪效果与实时性,但该方法易受光照的影响,误检率较高;基于颜色分割的车牌定位方法主要是利用车牌的底色与背景颜色进行区分进而在画面中定位车牌区域。因为车牌的颜色具有标准规定,在通常情况下该方法具有快速且准确的定位效果,但当车辆与车牌底色颜色相似时则识别率较低。在车牌字符的倾斜校正方面,常用的方法有基于Radon变换与Hough变换的方法[5],两者原理基本相同,车牌的校正效果都较佳。而对于车牌识别方面,常用的有模板匹配、神经网络[6]及基于机器学习[7]等方法。基于模板匹配的识别方法具有快速且方便的优势,但对于噪声敏感及相似字符识别效果则不太令人满意,需要与其他方法搭配使用以达到一个较好的识别效果;基于神经网络的识别方法具有较好的鲁棒性与识别准确度,但前提是需要建立大量的训练样本;而基于SVM分类机的识别方法则不需要制作大量的训练样本集同样也可以实现快速、准确的字符识别。
车牌识别技术使用图像作为获取[JP+1]信息的手段,而因为相机的安装位置、工作环境等因素会对图像造成影响,车牌识别技术依旧面临着各种挑战。本文结合已有的研究成果及车牌自身特点,针对车牌识别系统中的重点问题提出解决方案。首先通过HSV色彩空间与连通区域分析的方法来定位车牌区域,然后利用Hough变换与像素点投影的方法来完成车牌的倾斜校正与分割,最后采用SVM分类机来分类汉字字符与数字字母字符。
1 车牌识别系统流程
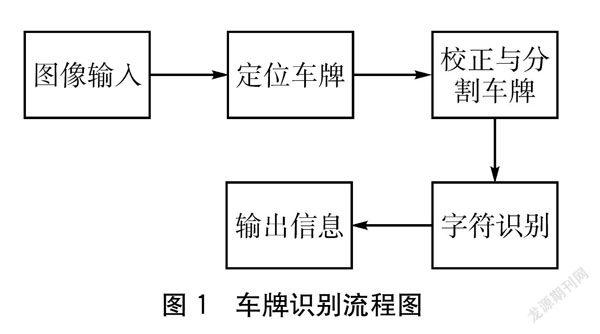
车牌识别系统为从图像中检测车牌目标,并提取字符信息的一系列图像算法,其主要流程如图1所示:(1)车牌的定位,这是指从摄像机拍摄的画面中寻找车牌区域;(2)车牌校正与分割,由于车牌与摄像机常呈一定角度,图像中的车牌画面在绝大多数情况下都存在一定的透视变形,因此在识别字符之前需要先对车牌部分进行倾斜校正,并裁剪出标准化的单个字符图像,以方便最后的识别;(3)车牌字符的识别,其作用为根据形态学特征,准确识别图像中存在的特定字符。
2 定位车牌
2.1 基于MSR与HSV的图像预处理
因车牌采集环境较为复杂,得到的图像质量不佳,应通过增强图像的色彩信息来改善图像质量。为此,先通过MSR(Multi Scale Retinex)[8]图像增强算法来增强图像中的暗部信息。MSR常用于提升拍摄于低光照水平画面的亮度,可以很好地解决光线昏暗导致的图像细节信息缺失的问题。
然后将RGB色域图像转换为HSV色域。HSV色域將RGB空间的三原色信息转化为色调(H)、饱和度(S)、亮度(V)三种信息,由于这一颜色空间将颜色信息与亮度信息独立,有利于排除光照影响,在图像中保留目标本身的颜色信息。
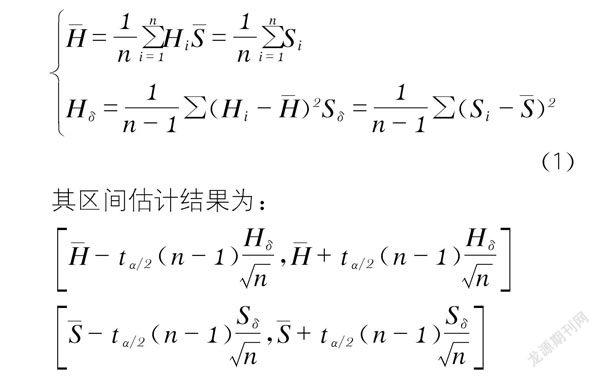
根据《中华人民共和国机动车号牌》(GA36-2007)的规定,我国机动车辆的牌照共有蓝底白字、黄底黑字、黑底白字和白底黑字4种样式。为确定各个颜色在H、S、V通道的值域,拍摄同一背景色的车牌处在不同光照环境及背景下的照片,统计图片中车牌部分在HSV空间中的三个分量值信息,再对算法中三个分量的取值进行区间估算。当车牌为黄底或蓝底时,由于两者间明度差别不大,不用考虑V分量;若为车牌白色或黑色,由于两者间明度差别较大,则只考虑V分量。具体公式如下:
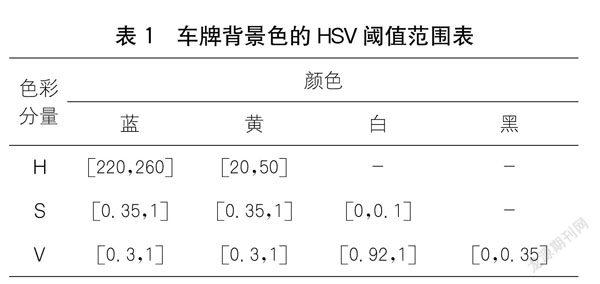
通过如上方法统计的车牌图像信息,确定了车牌颜色在HSV颜色空间的阈值范围(如表1所示)。在此基础上可利用H、S通道分量阈值范围与二值化方法相结合,在图片中提取出车牌区域。
2.2 形态学处理
在前文中得到的车牌区域图像为二值化图像,其中包含了大量的干扰信息,形态学处理的目的就是去除这些干扰信息。车牌的尺寸一般规定为(440×140)mm,根据这一信息,采用长宽比为3:1的矩形结构元素对HSV二值化后的图像进行闭运算来获得连通区域,再使用开运算去除图像噪声,并对连通区域进行彩色标记,以便更准确地检测车牌区域的位置。
2.3 投影定位
经由上述形态学处理后的图像并不完全为车牌区域,其为包含车牌区域及车牌周围一定范围的伪车牌区域。为此,本文根据连通区域的宽度、高度、宽高比、面积及像素密度等参数去除伪车牌区域,保留感兴趣的车牌区域,从而实现车牌的定位。具体车牌定位过程如图2所示。
3 车牌校正与分割
3.1 基于Hough变换车牌校正
由于二维成像原理的限制,当相机的拍摄角度不正对着车牌时,拍摄出的车牌图像相对于车牌原本的外观会有一定的透视变形。为校正这一倾斜,采用基于Hough变换方法对车牌进行倾斜校正。对于图像上的点(a,b),通过ρ=a cosβ+b sinβ转换到参数空间的点(ρ,β),在ρ-β上的一条正弦曲线对应着原始图像中的任意一点。然后,对车牌图像中的每个像素点进行Hough变换,计算出β值,也就是车牌倾斜角度,进而实现校正。具体效果如图3所示。
3.2 车牌字符分割
在分割单个字符之前,需采用水平投影法对校正后的车牌图像进行边框裁剪,得到最终的车牌字符数据。在分割字符时,本文根据以下三种情况,采用不同的分割策略。
3.2.1字符粘连
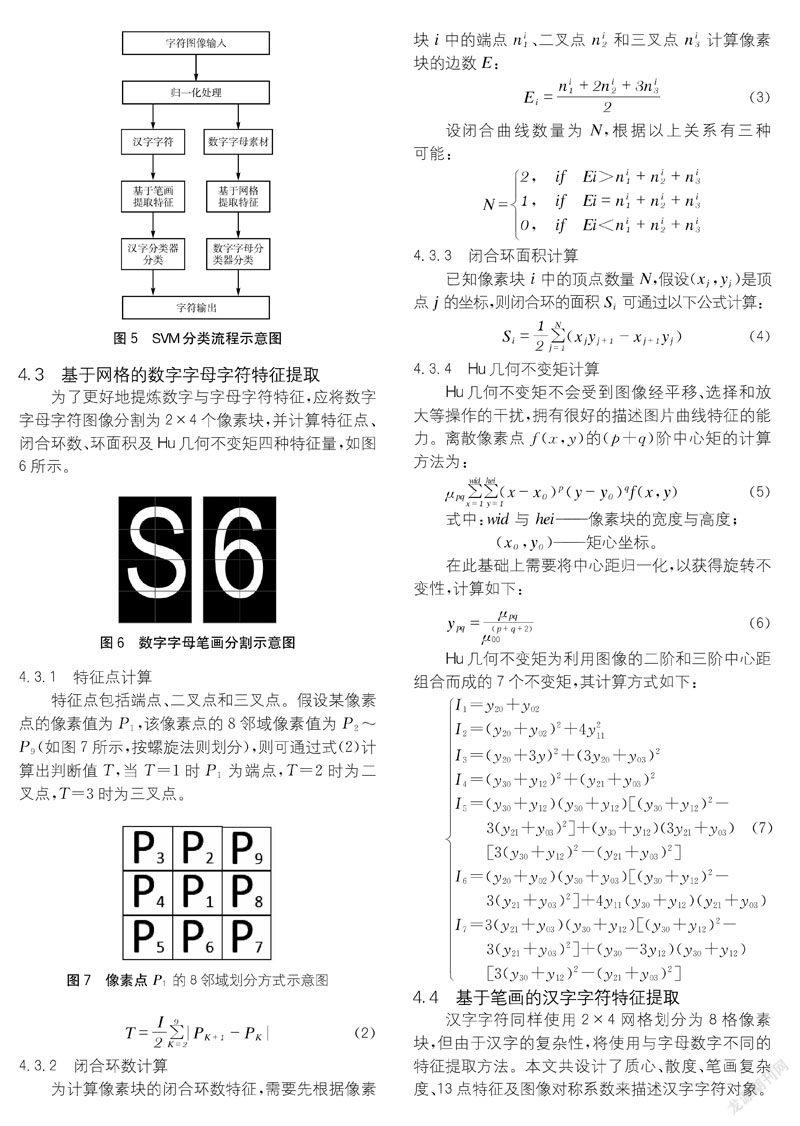
当W 3.2.2 字符断裂 若char widthj<0.5×width,且0.5×width>char widthj+1(char widthj为当前字符宽度,char widthj+1为下一个字符宽度),则判断为字符断裂,可将当前字符与下一个字符合并。 3.2.3 字符为数字“1” 当char width<0.5×wid且th 4 基于SVM的车牌字符识别 4.1 支持向量机SVM 支持向量机(Support Vector Machine,SVM)用于两类目标和多类目标之间的区分计算。SVM基于统计学习理论,主要针对小样本问题,能够在较少的样本信息中求出最优解,可以有效地解决非线性问题和高维数据分类等问题。基于以上原因,本文使用SVM来进行单个字符的识别工作。 SVM识别车牌的流程如下页图5所示,首先,对素材进行归一化处理,以制作适合分类的样本素材。由于原始特征的数据量庞大,为了提高识别效率,通过选择提取字符的特征来压缩特征信息量,构建出多维特征信息。最后,使用训练好的多类别SVM分类机来识别对应的字符。 4.2 字符图像归一化 根据《中华人民共和国机动车号牌》(GA36-2007)的规定,我国机动车牌照由一位代表牌照所在地区的汉字和多位数字、英文字母组成的编码构成。考虑到三者之间的区别,本文将识别对象分为汉字字符对象与数字字母字符对象两类。 由于原始图像之间的拍摄距离和拍摄角度不尽相同,提取后的字符图像之间也不一致。在这样的情况下,直接进行字符特征提取并分类的效果往往不佳。为了消除因字符素材的形状、尺寸等参数不同而造成的特征提取效果不佳的问题,应对分割后的字符使用双线性插值法归一化为42×84像素的图像。 4.3 基于网格的数字字母字符特征提取 为了更好地提炼数字与字母字符特征,应将数字字母字符图像分割为2×4个像素块,并计算特征点、闭合环数、环面积及Hu几何不变矩四种特征量,如图6所示。 4.3.1 特征点计算 特征点包括端点、二叉点和三叉点。假设某像素点的像素值为P1,该像素点的8邻域像素值为P2~P9(如图7所示,按螺旋法则划分),则可通过式(2)计算出判断值T,当T=1时P1为端点,T=2时为二叉点,T=3时为三叉点。 4.3.2 闭合环数计算 为计算像素块的闭合环数特征,需要先根据像素块i中的端点ni1、二叉点ni2和三叉点ni3计算像素块的边数E: 4.3.3 闭合环面积计算 已知像素塊i中的顶点数量N,假设(xj,yj)是顶点j的坐标,则闭合环的面积Si可通过以下公式计算: 4.3.4 Hu几何不变矩计算 Hu几何不变矩不会受到图像经平移、选择和放大等操作的干扰,拥有很好的描述图片曲线特征的能力。离散像素点f(x,y)的(p+q)阶中心矩的计算方法为: 式中:wid与hei——像素块的宽度与高度; (x0,y0)——矩心坐标。 在此基础上需要将中心距归一化,以获得旋转不变性,计算如下: Hu几何不变矩为利用图像的二阶和三阶中心距组合而成的7个不变矩,其计算方式如下: 4.4 基于笔画的汉字字符特征提取 汉字字符同样使用2×4网格划分为8格像素块,但由于汉字的复杂性,将使用与字母数字不同的特征提取方法。本文共设计了质心、散度、笔画复杂度、13点特征及图像对称系数来描述汉字字符对象。 4.4.1 质心的计算 二值图像的质心可体现图案轮廓的集中位置。设像素块i在x轴方向上的质心与在y轴方向上的质心分别为Centerx与Centery,其计算方法如式(8)~(9)所示,其中(x1,y1)为图像的左上角坐标,(x2,y2)为图像的右下角坐标。 4.4.2 散度的计算 与质心相反,散度体现的是区域内笔画相对于图案轮廓中心的发散程度。散度同样分水平方向的散度Divx和垂直方向上的散度Divy,其计算公式如式(10)~(11)所示,其中(cx,cy)为像素块的中心坐标。 4.4.3 笔画复杂度的计算 笔画的复杂程度设计为代表着字符的笔画在x方向和y方向上的复杂度px、py,计算方式如式(12)~(13)所示,其中σx和σy是像素块内的像素值在水平方向和垂直方向的标准差。 4.4.4 13点特征的计算 13点特征法体现的是二值图像的像素值在各个区域、方向上的分布情况。其中前8点特征为各像素块内的白色像素(像素值为1)的数量Nm,其计算方式如下: 式中:m——像素块编号; wid和hei——像素块的宽和高; aij——像素块内坐标第i行j列的像素点的像素值(在二值图像中为0或255,所以在计算前需要先将像素值除以255)。 第9点特征为图像中所有白色像素点的总数,计算方式如下: 第10点、11点特征为对角线上白色像素点的总个数。设像素块左上角点编号为1,对剩下三个角点以逆时针顺序进行编号。考虑到像素块长宽比为4:1,第10点、11点特征的计算方式如下: 第12点、13点特征为字符图像的纵轴中线与横轴中线上白色像素点的总数,计算方式如下: 4.4.5 图像对称系数的计算 图像对称系数包含了字符的结构信息,应选用基于水平中心轴和垂直中心轴的对称系数来提取字符图像的对称结构信息,计算方式如下: 4.5 基于SVM的车牌字符识别 由于所需识别的对象较多,可根据纠错编码输出法来构造多分类SVM分类器,如图8所示。根据规定,国内机动车牌共使用31个汉字字符、34个数字与英文字符。本文构造五位编码的分类器来识别汉字,使用六位编码的分类器来识别数字与字母。 多编码SVM分类器结构的分类流程如图8所示,其中每一个分类器会输出为0或1两种结果,将这些结果组合成多位编码即可用于识别对应的字符。 4.6 测试试验 本文基于C++ MFC平台实现了算法构成,并搭建了试验系统。接下来使用了大量的字符样本训练了分类器,并使用500张包含不同车牌的图片进行测试。 试验的测试结果为:数字字母字符的识别率为97.2%,平均识别时间为31 ms;汉字字符的识别率为96.6%,平均识别时间59 ms;合计识别率为96.6%,合计平均识别时间为45 ms。 5 结语 本文基于SVM分类器技术开发了一套可适用于人工车道与ETC车道的自动化车牌识别系统。试验表明,该系统车牌字符的识别率达到96.6%,平均识别时间为45 ms。由此可见,该系统的识别率足以应用于较为复杂的检测场景,且识别速度符合ETC系统对检测即时性的要求。 参考文献 [1]张明军,俞文静,李伟滨,等.一种基于机器学习的车牌识别系统的设计[J].计算机技术与发展,2020,30(5):216-220. [2]马志远,余 粟.基于改进K近邻算法的小型汽车号牌识别系统[J].软件导刊,2020,19(6):231-234. [3]李学顺, 魏宗寿. 基于彩色边缘检测和Edge Boxes的车牌定位方法[J]. 电脑知识与技术, 2019, 15(7): 187-188. [4]YANG Y,GAO X,YANG G.Study the method of vehicle license locating based on color segmentation[J].Procedia Engi neering,2011(15): 1 324-1 329. [5]芮 挺,沈春林,张金林.车牌识别中倾斜牌照的快速矫正算法[J].计算机工程,2004,30(13):122-124. [6]盛兆亮, 高军伟. 基于区域统计和BP神经网络的车牌识别[J]. 信息技术及图像处理, 2019, 42(8): 78-82. [7]陳 政,李良荣,李 震,等.基于机器学习的车牌识别技术研究[J].计算机技术与发展,2020,30(6):13-18. [8]Zhuang Peixian,Li Chongyi,Wu Jiamin. Bayesian retinex underwater image enhancement[J].Engineering Applications of Artificial Intelligence,2021,101(1):104 171. 作者简介: 曾夏明(1990—),工程师,主要从事高速公路智能交通机电工作。
猜你喜欢
数字技术与应用(2016年9期)2016-11-09
科教导刊·电子版(2016年22期)2016-11-02
科技视界(2016年16期)2016-06-29
电脑知识与技术(2016年9期)2016-05-18
物联网技术(2015年5期)2015-07-18