半实物仿真多艘无人船编队控制系统的研究与分析
2022-06-09 04:57杨晓昆
海风 2022年6期

本文设想并试验了一个实时设备电路的模拟系统,以模拟对多艘无人船舶的编队控制过程。该控制器可以通过对电压信号的数模转换模拟电机控制信号的传输和获取,以及可以通过对串行接口模拟计量仪表的传输和数据获取。将无人驾驶的船舶控制器建立在PC104平台上,并采用了基于VxWorks的实时控制软件;又利用了工业计算器和VC++在6.0环境建立了无人值守的船舶仿真中心,并实现了对无人值守船舶仿真过程数据的图形化显示。最后,通过模拟实验证明,该软件能够良好地模拟多艘无人驾驶飞行器的编组状况,在验证编队算法和测试无人船嵌入式控制软件等方面,都具有重要的实用性。
目前,无人船编队体系的大致发展阶段为控制系统方案设计、控制器设计、控制算法实现和实验验证阶段。在实验出现问题之后,就有必要返回控制器设计链接并进行重新设计。但是,由于无人驾驶的船舶编队测试成本高昂,而且受各种原因影响,在研发初期,编队控制系统的设计无法用实际编队测试进行分析和测试。所以,为了对在研制的早期阶段系统进行检验和校准,就有必要设计更便于在实验室进行的设备在环仿真控制系统,通过设备在环境模拟的物理实验。同时,在MATLAB中对编队算法进行模拟后,可以忽略模型间数据的延迟和精度损失,这种问题很可能会使得实际系统中的编队计算存在差异。而环路模拟硬件则能够取代这种问题,从而更加高效地进行计算实验。所以,无人船编队回路模拟装置对于验证控制系统设计和编队计算有关键意义。
一、无人船系统总体方案设计
(一)系统操作
目标要求,无人驾驶技术船舶与水质检测等方面的技术联合可以大大提高水质检测工作的有效性。目前,由于中国对无人驾驶船编队技术的研制投资较少,面临着编队制导算法难以实现、定位精度降低、不利于编队稳定性等问题[1]。在此基础上,可以设想一个无人编队系统,该系统应当符合下列条件。为了满足低吨位、装卸方便的要求,必须设计小型、轻型无人驾驶船舶。实时执行任务。在飞行与编队的控制阶段,无人值守舰船须同时负责传感器数据读取、位置统计、位置管理、命令分析等任务[2]。对它们系统的即时性能也有高度的要求,还必须负责任务之间的统一调度工作,以中断因任务冲突而产生的任务。该系统利用无线模块与地上站点连接,利用地上站点显示航行数据并提供无人船编队指示,从而完成航迹设计功能。
(二)控制系统的基本构成
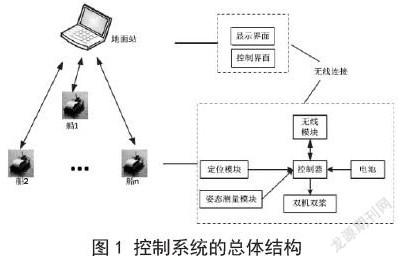
该控制系统主要由无人驾驶航空器编队、互联网通信系统和地上站点三个部分构成,以地上站点为主要的监控单位。数艘无人值守船舶可以下载收集的数据,并在船站收到指令。余艘无人值守船舶之间的消息则经由无线网络传递。控制系统的总体结构如图1所示。
1.无人驾驶的船舶主要由船体、船舶控制系统和供电构成。船舶还设有控制系统和供电。而无人船编队平台的船舶控制系统则包括定位、位置检测、电源和无线通信等模块,能即时接收无人驾驶的定位、航向、转速和功率。船舶控制系统还能够将数据到地上站点或在地面站显示,接收并分析地上站点所发出的数据和命令,从而有效监控无人值守舰船的运动[3]。
2.网络通信是连接多艘无人驾驶船舶和地面站的关键。
3.一些地上站点甚至是沿海站,主要通过联系无人值守舰船实现人机交互、全通信和数据传输。
(三)关键技术的选择
在对多艘无人船编队的监控研究中,需要先明确其结构,以及无人船之间的监控与通信模型,充分发挥其优越性[4]。该结构确定了无人值守舰艇实施任务的逻辑关系,确定了任务分配与问题解决的方法,还与系统实现的软件与硬件选择相关。集中性通常意味着每个无人值守舰艇都会听到特定核机器人的指令,以及由核机器人负责接受到的信号。核机器人主要采集编队中每个无人值守舰船的数据,利用高度算法得出各个无人值守舰船的预期方位和运动,以获得编队效果[5]。目前,它是一个比较成熟而容易实施的编队展示方式,主要适用于无人驾驶船舶的编队展示活动。在分布式系统中,每艘无人驾驶船都拥有相同的能力,可相互交换信息,并拥有决策与评价的能力。而分散结构的信息交换范围较小,对每个人来说都是一个单独的信息系统,因此一只无人值守舰艇的损坏并不能影响整个运行。顾名思义,杂交技术就是对上述二个结构的综合,以及对这二个结构结合的共同特征。他将整个系统分为若干小组,再汇集为一个小组。
(四)总体技术路线
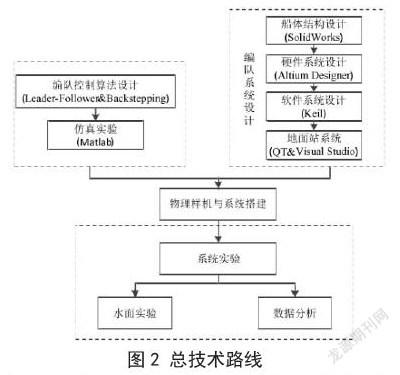
通过对无人装配系统结构和关键技术的选择,确定了图2所述的一般技术路线,并提供了主要系统算法组成部分。
二、无人船硬件设计
(一)仿真模拟
仿真应满足执行船体状态、串行端口数据传递和模拟电压读数等三种功能。为此,设计的仿真系统由一套装有三个标准RS-232串行端口和PCI扩展A/D和D/D扩展板的工业计算机系统实现[6]。这里选用的9112扩展板,共包含16个A/D通道,能够满足用户的需要。控制节点根据需要进行电子传感器数据接受、无线通信数据接受与传送、电机电压传输等功能。其中,数据的接受与传送均以串行端口方式执行,电压则以模拟电流信号的形式传递。所以,控制器节点的设计均采用了内置PC一百零四控制平台,并设有二个RS-232串口和二个A/D出口通道。
(二)远程控制中心
远程控制中心应执行接受和传送无线通信数据的功能,其数据的接受与传送均采用串联型接口实现。为此,远程控制中心的设备设计使用了标准笔记本电脑,并选择了USB-RS-232串行型接口[7]。模拟中心与测控节点之间有二种连接,它们为标准串口和二个D/A和A/D通道。其中,标准串口完成了对传感器数据的模拟,而二个D/A和A/D通道则完成了对二台电机控制电压传输的模拟。而测控船与远程中心之间有一种无线通信网络,该网络由一种无线模块组成,以进行信号交流,该通信接口也可简化,并从逻辑上可以理解为串行通信。
Simulation Center软件是VC++6.0编制的MFC编程,包含了串口控制器、Pci9112扩展卡控制器,以及曲线绘制组件[8]。闭环仿真系统的硬件设计要求仿真控制系统实时接受控制节点的输入信息并形成实时动态输出,高实时性能够提高零点五实物模拟系统的稳定性与精确度。该软件通过多媒体定时器技术来实现模型迭代的实际性能,定时精确度约为一毫秒。而基于经验,对无人驾驶船舶模型的仿真阶段约为10毫秒。使用Visualc++WM对传感器进行了调度,以及定时器消息映射的实现。并通过基于对象的软件设计方法来仿真无人值守的船舶,设计类别cautausv补充了对无人值守船舶的内部运动学模拟,提供了与无人值守的船舶内部运行空间密切相关的所有参数,并将其封装到该类别中用作私有输出。通过采用这种方法,将无人值守船舶的内部运动空间完全利用这种内部动作完成。同时通过对无人值守船舶特性的解析,需要一个功能来实现无人驾驶船舶状态的实时重复,以解决下一时刻船舶的状况,并规划一个功能cautausv::onestepo来实现船舶状态的重复,它不仅能及时模拟船舶的运动。还需要设计函数cautausv::getstateso来实现无人驾驶船舶状态的输出,与使用传感器测量船舶状态相对应。还必须设计cautausv功能:一个用于外部控制设备的控制功能,对应于影响船舶状况的螺旋桨运动。无人造船系统的软件设计主要包括以下几点。
1.UC/OS-II操作系统的传输和任务分配
执行编队任务时,处理STM32任务和计算数据的要求很高。UC/OS-II操作系统能够实现任务共享和调度,如读取数据、计算姿态和接收无人驾驶船只的命令,以确保任务的实时完成。
2.无人造船控制系统软件的实现
包括位置数据融合、导航控制和编队控制软件的设计与实现。
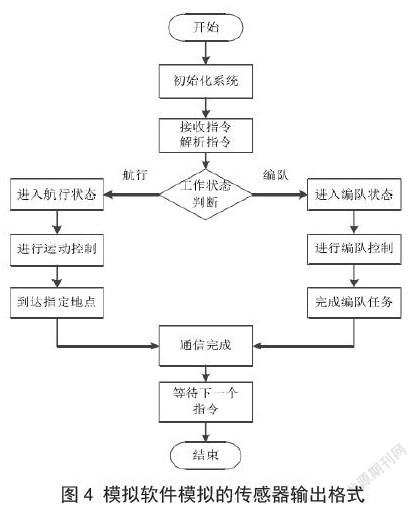
3.通信编程
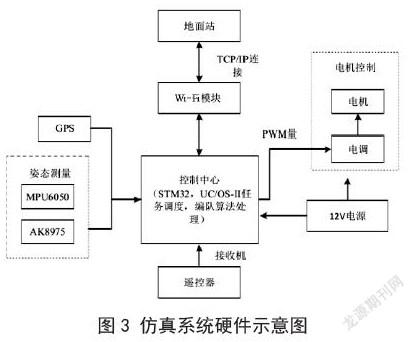
无人驾驶船舶通过Wi-Fi连接到地面站进行数据传输。模拟软件模拟的传感器输出格式如图4所示。
(一)构建系统
根据上述章节所述无人造船系统的设计,本章将对三艘小船进行测试,并通过表面物理测试验证监控系统形成的可行性。验证监测多艘无人船编队的有效性和稳定性。从编队算法、船体结构、软硬件系统的设计到地面站系统的实施,图5所示无人编队控制系统的原型开发已经完成。图(a)是内部硬件连接图,图(b)实际上是完成的三艘无人驾驶船只。原型平台搭建完成后,首先测试内部控制面板,确保其正常运行。然后用遥控器检查无人驾驶船舶的叶片是否正常旋转。与地面站系统一起,三艘无人驾驶船舶通过TCP/IP协议连接到地面站,以测试连接是否成功。试验在实验室进行,电机通过远程控制和地面站可以正常运行;GPS内部信号弱,难以在地图上显示,地面站连接正常。
(二)实验分析
控制平台完成后,发射测试将测试一艘无人驾驶船舶的导航功能和多艘无人驾驶船舶的编队功能。试验场地位于实验室后面的河流,相对平静,没有障碍物。测试的第一步是确定地面站每艘无人船的目标点,并观察无人船是否到达指定位置。其次,将数据作为编队的导航路线发送给飞行中的无人船,并观察多艘无人船的编队。最后,应测试无人驾驶船舶信号的接收能力和耐久性。无人驾驶船舶接收信号的最大距离为100米,连续航行15分钟后可返回初始位置,满足试验要求。
随着水资源保护的重要性越来越显著,与多艘无人驾驶船舶合作的水质监测技术也将受到更多关注。作为水质协同监测的关键技术,多艘无人船编队技术越来越受到人们的关注。本文根据国内外无人船编队的研究现状,定义了无人船编队系统的具体要求和系统体系,开发了无人船编队监控系统。通过编队控制器进行编队控制,并通过EKF过滤技术提高无人驾驶船舶的定位精度,以确保编队过程中的编队稳定性。
参考文献:
[1]万占鸿,王艳,宋天予,等.基于协同云控制的多无人船编队协同控制系统及方法.CN108200175A[P],2018.
[2]刘畅.基于定向天线的多无人船编队自组网络拓扑控制算法研究[D].海南大学,2017.
[3]陶瑞.无人船控制系统设计与研究[J].电子技术与软件工程,2020(21):2.
[4]龚波.无人船航向控制器设计与仿真研究[D].广西大学,2019.
[5]张桂军,冯凯,吕锦钊,等.对无人船控制系统的初步研究及应用[J].广东造船,2021,40(1):4.
[6]关海滨,艾矫燕.全局快速终端滑模控制在欠驱动无人船镇定中的应用研究[J].广西大学学报:自然科学版,2018,43(6):12.
[7]张舵,刘满国,章校,等.基于半实物仿真环境的系统误差分析研究[J].系统仿真学报,2019,31(1):7.
[8]段素文.关于船舶综合控制系统研究与设计分析[J].中国水运(下半月),2014,14(11):113-117.
作者簡介:杨晓昆,男,辽宁葫芦岛人,汉,1983.12,大学本科,研究方向:从事无人船舶、编队控制。
猜你喜欢
中国自行车(2022年3期)2022-06-30
当代化工(2020年4期)2020-08-24
人民交通(2020年5期)2020-05-03
网络空间安全(2019年8期)2019-03-18
科学大众(中学)(2017年3期)2017-07-06
海外英语(2013年11期)2014-02-11
科技传播(2012年10期)2012-06-06
航空知识(2001年5期)2001-06-12