
叶菜机械化收获技术与装备研究进展*
2022-06-20 03:09邹亮亮刘雪美苑进董小花
中国农机化学报 2022年6期
邹亮亮,刘雪美,苑进,董小花
(1. 山东农业大学机械与电子工程学院,山东泰安,271018; 2. 山东省园艺机械与装备重点实验室,山东泰安,271018; 3. 滨州市引黄灌溉服务中心,山东滨州,256600)
0 引言
我国是世界上最大的蔬菜生产国和消费国,蔬菜播种面积和产量分别约占世界总量的40%和50%以上[1]。蔬菜是城乡居民生活必不可少的重要农产品,保障蔬菜供给是重大的民生问题。叶菜作为典型蔬菜,是指以植物肥嫩的叶片和叶柄作为食用部位的蔬菜,因其营养丰富,深受消费者喜爱,是我国居民不可或缺的营养源。
目前我国叶菜生产过程随着农村老龄化的现象日益凸显,农村劳动力短缺,农业生产成本不断攀升,叶菜生产“用工难”“用工贵”等问题日益突出,迫切需要加快叶菜生产全程机械化[2]。我国叶菜生产机械化起点低、起步晚、发展慢、水平低,已成为制约蔬菜产业发展的瓶颈。为提升我国叶菜生产机械化作业水平,消除装备技术体系薄弱对叶菜产业发展的阻碍,应综合分析我国叶菜生产机械化技术水平现状,基于国内叶菜生产状况,叶菜收获环节基本空白,严重制约了叶菜机械化作业的产业闭环链的形成,应重点解决影响叶菜生产机械化的薄弱环节。
在叶菜生产各环节中,收获环节尤为费时费力,作业量超过叶菜生产全部作业量的40%[3-4]。为确保叶菜的品质,与其他作物相比,叶菜的适时收获更为必要。叶菜类蔬菜主要分为绿叶菜、香辛叶菜和结球叶菜三大类别,不同种类的叶菜形态各不相同,因而收获原理也应有所差别,为了研制可靠性高、通用性强的叶菜收获机械,需要对目前国内外叶菜收获机械研究现状及关键技术进行综合分析。
1 叶菜机械化收获装备研究现状
1.1 绿叶菜机械化收获装备
绿叶菜是以鲜嫩的绿叶、叶柄和嫩茎为食用部位的速生蔬菜,品类丰富,主要包括菠菜、生菜、上海青、茼蒿等叶菜。绿叶菜茎直立,中空,脆弱多汁,在采收过程中极易造成绿叶菜茎叶的机械损伤,由于绿叶菜的物理特性,使得机械采收难度较大。目前我国绿叶菜收获主要靠人工,机械化水平较低,费事费力,是导致蔬菜产业发展中成本剧增、效益下降的重要环节[5],因此需要大力提高绿叶菜机械化收获水平。绿叶菜收获机械可以解放菜农繁重的体力劳动,降低绿叶菜在收获环节的成本。
根据割刀的工作位置,绿叶菜收获机械可以分为割茬收获和铲根收获两种形式。割茬收获是指割刀在土上工作,将植株的茎部切断,切断后植株叶片散落。该种收获模式虽然收获方式容易实现,但是收获后的绿叶菜割茬容易污染,使货架期缩短[6],而且无序收获方式不利于绿叶菜采后的打捆销售。铲根收获是指割刀工作在土下,切断植株的根部,然后将整株绿叶菜进行收集。
根据采收后绿叶菜的状态,可以分为有序收获和无序收获两种收获方式。无序收获在绿叶菜播种时一般采用撒播的形式,收获过程采用铲根收获和割茬收获两种收获形式。其中铲根收获对起垄有要求,一般要求起垄平整,收获时土质松软。有序收获主要采用铲根收获形式,一般要求播种时采用条播的形式,常采用夹持输送的形式。国外在绿叶菜收获机械研制方面,其中意大利某公司推出了多种型号的叶菜收获机械[7],可以满足对菠菜、上海青等多种绿叶菜的割茬无序收获、铲根无序收获、带根有序收获和割茬有序收获等多种收获形式。4种绿叶菜收获机械中,SLIDE ECO型割茬无序收获机收获效率最高,收获速度最高可以达到10 km/h;SLIDE VALERIANA型带根无序收获机由于割刀土下作用,收获效率较低;TRAX SMALL型割茬有序收获机与RAPID型带根有序收获机均采用夹持输送形式,为了避免损伤,收获效率最低。虽然该系列的收获机械可以对不同类型的绿叶菜进行收获,但是对绿叶菜的种植农艺要求严格,需要相应的耕整地、播种以及移栽机械配合。
与国外成熟的绿叶菜收获机械相比,虽然国内学者们提出了一系列绿叶菜机械收获方案,但只是前期的研究开发,鲜有成熟产品投入市场。章永年等[8]设计了一款自走式绿叶菜有序收获机,采用割茬有序收获的形式,经过分禾、夹持、切割、输送、转向、装载几个环节,通过对夹持输送机构进行设计,最终实现对绿叶菜的低损伤有序采收。高龙等应用功能树确定叶菜收获机的总体方案,设计了一种小型智能自动化叶菜收获机。通过智能调节割幅宽度和割茬高度,可以满足对多种叶菜进行无序散收。
国内对绿叶菜收获机械的研究起步晚,目前处于起步阶段,主要采用引进和消化吸收的技术研究策略。但由于国内绿叶菜多为散户种植,种植规模较小,且种植农艺也不适合国外绿叶菜收获机械,使得欧美国家的大型收获机械难以满足国内的需要,所以迫切需要研制高效、适用性强的绿叶菜收获机械。
1.2 香辛叶菜机械化收获装备
香辛叶菜类主要包括大葱、韭菜、香菜等叶菜。香辛叶菜主要有两种收获方式,分别为以大葱为代表的土下收获和以韭菜为代表的土上割茬收获。国外辛香叶菜收获技术及装备相对成熟,可实现对该类叶菜的机械化收获。德国某公司生产了多款大葱联合收获机,配置上拥有开放式主机结构,可以简单而精确地进行深度控制,采用柔性夹拔皮带,液压驱动输送皮带,可以完成对大葱的打稍、挖掘、除土、夹送、堆放等作业。该公司生产的韭菜联合收获机,一次可收割单行或多行韭菜,使用负压风机可以使韭菜切割时保持直立,韭菜被两个旋转的锥形刷辊导向入料皮带。切盘按照设定的切割高度将韭菜切断,切割高度可液压调节。韭菜接着被转向放置在输送带上,随后被切成所设定的小段,然后装入木箱或料斗。
虽然我国对大葱、韭菜等香辛叶菜类收获机械的研究起步较晚,但是发展速度很快,国产化装备水平较高,而且以中小型收获机械为主,代表机型有:HX-SHJ型大葱收获机、JT-200型韭菜收割机、hx-200型韭菜收割机。但是以大葱收获为例,目前的大葱收获机主要以单行收获为主,自动化程度低,功能少,只能实现简单的挖掘作业,去土、收集工作仍需人工完成。针对目前香辛叶菜收获机械存在的问题,国内学者对其进行了深入的研究,并提出了相应的改进措施。王方艳等[9]研制了一种集挖掘、清土、升运、铺放等作业为一体的大葱收获机。整机传动系统分为机械传动部分和液压传动部分,机械传动部分实现收获机行走系统及挖掘收获系统的动力协调,液压传动实现挖掘收获系统的位置调整、夹送装置的转速控制、扭铺装置的转速控制。针对目前韭菜收割机安全性和通用性差等问题,宫元娟等设计了一款低割茬的韭菜收割装置,并提高了收割机的安全性,同时也可以用于收割空心菜、沙葱等多种作物,实现了一机多用。
1.3 结球叶菜机械化收获装备
结球叶菜类主要包括甘蓝、结球生菜、大白菜等土表切根类叶菜。目前,结球叶菜类收获机械较为成熟,其中以甘蓝收获机械为代表,已经应用于世界各地。国外对甘蓝收获机械的研究起步较早,技术研究相对成熟,已实现商品化生产。早在20世纪30年代,前苏联就研制了世界第一台甘蓝收获机,其中设计的拔取装置、切割装置、输送装置仍然是现在甘蓝收获机研究的核心部件,奠定了甘蓝收获机的基本结构[10]。现阶段国外甘蓝收获机械较为成熟,如意大利的RAPID型甘蓝收获机,收获行距小,最小行距为35 cm,采用前齿刀切割头,可以通过传感器调节切割深度,实现自动化调节。比利时的KOROVM DB型甘蓝收获机智能化程度高,单行收获,采用先拔取后切根的收获形式,需要拖拉机配套动力不小于94 kW,最小收获行距为55 cm。丹麦的TK-1000型甘蓝收获机配备网式压紧皮带,确保甘蓝在输送和切根时的稳定性。网式压紧皮带上下轻压夹持输送,稳定性好,可同时适用于球形和扁圆形直径为20~50 cm叶菜,适用范围广。采用圆盘式切刀,能稳定切除作物根部。配套动力不低于104 kW,适宜行距不低于60 cm。3种收获机械较为成熟,可以满足不同行距甘蓝的收获需求。
国内对甘蓝收获机械的研究起步较晚,采用引进和消化吸收的模式,已有北京、成都、苏州等多地引进国外的甘蓝收获机,用于甘蓝生产和技术研究[11-12]。通过对国外甘蓝收获机的推广示范,结合我国种植农艺特点,国内专家学者对甘蓝收获机的关键机构进行了一系列的改进升级,并进行了大量的试验验证,基本实现甘蓝的机械化收获。
综上所述,通过对3种叶菜收获装备的分析比较,发现虽然结球叶菜收获装备体积较大,但是由于结球叶菜最外层叶片的保护作用,且最外层叶片通常不被食用,收获过程结球叶菜食用部位不易损伤,因而结球叶菜收获机械收获效果最好。香辛叶菜直立性较好,收获过程常采用夹持输送的方式,便于收获后的收集打捆,收获效果较好。绿叶菜种类最多,导致绿叶菜收获模式有所差别,使得收获机械的收获原理有所不同。此外,绿叶菜茎叶作为食用部位,收获过程极易损伤,这也增大了绿叶菜收获机械的收获难度,收获效果一般。因而可以看出,绿叶菜收获装备具有较大的提升空间。
2 叶菜收获机械化技术研究现状
考虑到叶菜的形态以及食用部位主要以柔嫩的茎叶为主,收获过程可以总结为由“切—挖—拔(割)—送—装”等多个作业环节组成,不同类型的叶菜收获过程可由不同的作业环节组成。各个环节之间相互联系,相互影响,每一个环节都会对最终的收获质量产生影响,如图1所示。
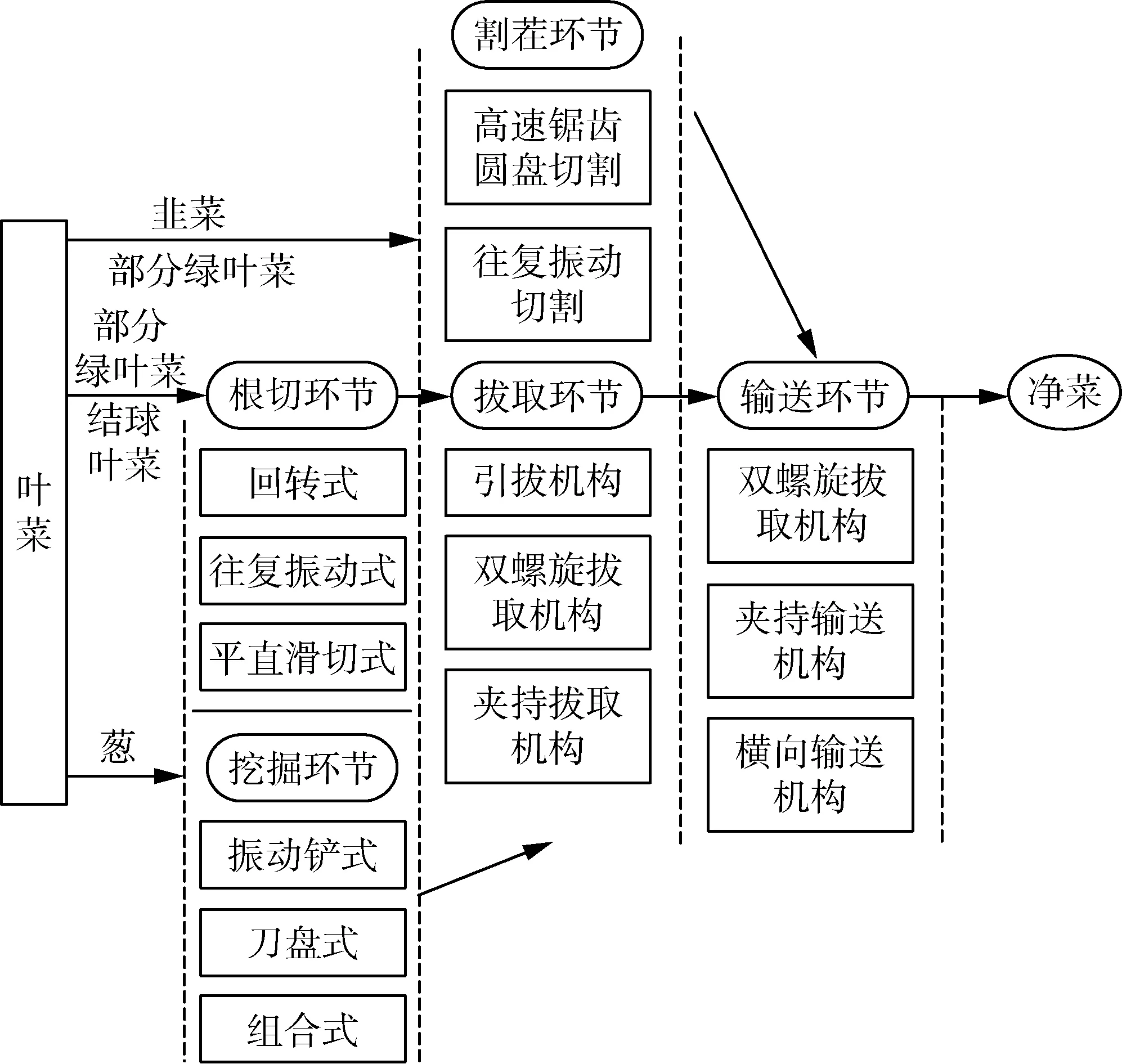
图1 叶菜收获过程图解
2.1 叶菜与部件互作过程研究现状
切根是菠菜等叶菜收获过程的首要环节,对收获质量起决定性作用。根切过程决定了铲切阻力,影响了收获机器的能耗[13-14]。根切过程同时也对土壤的扰动有影响,切根质量好坏直接决定收获过程的后面环节,因而明晰根切过程中根切铲与土壤和根部的互作机理变得尤为重要。绿叶菜的根部较细,茎叶多直立状态,Fujisawa等[15-16]对菠菜收获机的根土铲进行优化,为了减少根土铲工作过程中的壅土量,对铲在土壤中的工作轨迹进行研究,将铲在土壤中的行进轨迹进行数学建模,并借助离散元分析的方法进行仿真验证,通过仿真分析得到了根土铲的最优工作轨迹。刘雪美等[17]设计了一种适用于白芦笋选择性收获机的末端执行器,利用离散元法建立了白芦笋—末端执行器—土壤的互作用模型,对末端执行器入土驱动力、剪切力以及夹持力等控制参数进行了定量描述,为叶菜切根过程的研究提供了理论基础。
在叶菜夹持有序输送过程中,植株极易受到夹持输送装置的挤压产生机械损伤。为了避免采收过程中由于作用部件引起的果蔬损伤,国内外学者为实现柔性夹持而进行了大量的研究。邹亮亮等[18]通过研究菠菜植株的流变特性,基于Burgers粘弹性模型构建了菠菜植株夹持输送作用下的流变本构方程,将菠菜塑性变形量作为衡量菠菜机械损伤程度的评价指标,研究菠菜与夹持机构的互作关系,实现低损伤夹持输送。为了减少采摘机器人末端执行器在夹持过程中对果蔬造成的损伤,苗玉彬等[19-20]设计了一种恒力柔顺夹持机构,通过在末端执行器的驱动机构和夹钳之间设置柔顺屈曲梁,采用打靶法和遗传算法计算求解柔顺机构的数学模型,设计优化柔顺机构的相关参数,使末端执行器在一定位移输入范围内具有恒力输出特性,并可根据夹持力大小调整,从而实现对果蔬的恒力夹持。
综上所述,通过建立叶菜力学模型,分析叶菜与收获作用机构的互作关系,采用主动控制、柔性夹持等技术,可以实现对叶菜的低损伤收获。
2.2 收获过程关键机构设计
2.2.1 根切机构设计
不同种类的叶菜根的尺寸和力学特性不同,因而根切方式和根切机构也不同。针对甘蓝等叶菜根部粗壮,根菜分离过程需要消耗大量的能量,了解甘蓝根部的物理和力学特性,对指导甘蓝铲切机构的设计和铲切参数的优化具有指导意义[21-22]。李小强等[22]通过对甘蓝根茎部的切割试验,分析了不同夹持、切割方式、切割方向和速度对切割力的影响,为甘蓝收获机切割器的设计与改进提供了理论依据。
目前绿叶菜收获主要采用的是割茬无序收获的形式,为了解决收获过程中机械损伤以及采后收集处理等问题,迫切需要解决绿叶菜低损伤、有序收获等关键技术。破土铲根是菠菜等绿叶菜有序收获的首要环节,铲根过程关联收获的后续环节,影响绿叶菜的机械损伤,因而需要对铲根过程进行研究。
目前叶菜铲根机构主要可以分为回转式、往复振动式和平直滑切式铲切机构。三种铲根机构,平直滑切式铲切机构结构最简单,采用滑切原理,适用于土质松散种植环境下的叶菜收获;回转式铲根机构可以提供较大的切割力,主要用于结球叶菜等较粗根系的切割;往复振动式通过振动的方式,可以轻松实现根土分离。
甘蓝根茎较其他叶菜根粗壮,因而需要较大的剪切力才能切断,为了顺利切断甘蓝的根,目前普遍采用回转式铲切机构。该机构可提高切刀受力的平衡性,有利于提升切根质量、切根效率,便于后续夹持输送。李天华等[23]采用并排布置的回转式圆盘切刀,通过调节切刀转速、切割位置、行走速度、切刀重叠量和俯仰角度等参数,使得切根反作用最小,此时切根效率高、切根效果好。
往复振动式铲切机构是通过铲刀左右或前后振动,铲刀跟随收获机械前进而切断叶菜根部。该形式一般适用于起垄的种植模式,通过动力源带动刀片左右摆动,刀片在土下作业,收获机械由于前进方向的动力牵引将叶菜根切断。意大利的SLIDE VALERIANA型带根无序收获机和日本的KOYO健人型叶菜根切机采用的是该种切割方式。该种切割方式切割效率高,但是在叶菜种植时需要起垄种植。
平直滑切式是模拟人工采收过程,利用滑切原理,当铲刀跟随机器一起前进时,将叶菜根部切断,一般用于切割根部较细长的绿叶菜。采用合理的滑切角可以降低切割阻力,降低机具作业功耗,因而需要对铲刀的刃口进行优化设计。苑进等[24-25]设计的菠菜收获机根切机构采用平直滑切式,将菱形曲面铲、三角直铲、矩形直铲3种铲进行对比,通过仿真分析,证明了在3种铲的规格基本尺寸参数一致的前提下,采用滑切形式的三角直铲在铲切过程中受到的铲切阻力最小,对土壤的扰动较小,因而铲切效果较好。权龙哲等[26]通过建立玉米根茬切割过程的动力学模型及能耗模型,揭示了最优滑切角与物料摩擦角之间的函数关系,以根土复合体为研究对象,设计了具有多级滑切角的刃口,大大降低了铲切功耗,为叶菜根部铲切提供了理论指导。
2.2.2 挖掘机构设计
挖掘过程是大葱收获的首要环节,大葱挖掘铲的工作深度较深,在设计的时候不仅需要考虑入土性能和功耗,而且要避免切断大葱。挖掘过程要配合抖土机构,作业时,挖掘铲和抖土筛联合作业,完成大葱挖掘和一次去土清杂。挖掘装置作为大葱收获的核心部件,影响大葱的挖掘效果及收获质量。常用的挖掘装置有振动铲式、刀盘式及组合式等。振动铲式、刀盘式挖掘装置入土效果与土壤松碎效果好,但易伤葱且功耗大。王方艳采用组合挖掘装置,该装置由位于大葱垄两侧的旋松刀组与垄底的V型挖掘铲组成,采用分步挖掘方式,可有效减少挖掘阻力,适度增加挖掘深度,对土壤的适用性较强,可提高大葱的挖掘深度,有效降低挖掘铲的挖掘阻力及工作适应性。工作时葱垄两侧的土壤被旋松刀组旋松侧抛,底部土壤被V型挖掘铲切割和抬升。侯加林等[27]对挖掘铲的铲刃斜角、铲宽和挖掘铲的水平倾角进行优化,提高了挖掘铲的入土性能,减低了能耗,避免在挖掘过程出现雍土和挖断大葱的现象。
2.2.3 拔取机构设计
铲完根后为了实现根菜以及根土彻底分离,需要对叶菜进行拔取。拔取机构主要分为夹持拔取机构、引拔机构和双螺旋拔取机构,如表1所示。

表1 典型的拔取机构Tab. 1 Typical structure of detaching mechanism
杜冬冬[28]采用引拔铲作为拔取装置,收获时引拔铲配合拨轮的方式,利用机具的前进速度,将甘蓝连根拔起并沿引拔铲导向杆向后引导至输送装置,拨轮起到辅助喂入的作用。
双螺旋拔取机构将结球甘蓝导正喂入后,将甘蓝拔起并输送到切根机构。工作时,由于螺旋轴与地面呈一定的角度,随着作业机车的前进,甘蓝根茎与螺旋轴接触,当螺旋轴与甘蓝根部及结球外包叶充分接触后,螺旋轴对甘蓝产生向上的拔取力,此后随着作业机车继续前进,甘蓝相对于地面的高度不断增加,甘蓝逐渐被拔离土壤,同时,压顶网带接触包裹甘蓝,在螺旋轴夹持及压顶网带的共同带动下,向切根机构输送[29-30]。
绿叶菜根部较细而且短,在被切断后极易被拔取,拔取力较小,采用夹持拔取机构容易拔取而且可以保持叶菜的直立状态,便于后面的有序输送。
2.2.4 割茬机构设计
割茬收获是指土表切割,主要用于收获韭菜、绿叶菜等叶菜,收获效率高。割茬收获过程中,切割质量对收获效果至关重要。施印炎等[31]采用虚拟样机设计方法,建立了切割部件的三维实体模型和茎秆的柔性简化模型,并进行刚柔耦合动力学仿真分析,选取切割器对茎秆切割力和重割率为评价指标,对自走式芦蒿有序收获机中往复式切割器的结构参数进行优化设计。
韭菜种植时采用条播的形式,收获时可以采用单行收获,割刀的形式采用圆盘锯齿刀,通过电动马达驱动刀具高速转动,对收割韭菜的根不会造成伤害,最大程度保护韭菜的下一次产量。针对绿叶菜的割茬收获,要求地表平整,为了提高收获效率,采用宽幅收获,割刀形式主要采用往复振动切割。与根切机构相比,虽然两种机构的结构形式相近,但是由于割茬是在土表完成,工作时工作阻力小,所以割茬过程更易实现。
2.2.5 输送机构设计
输送环节按照收集的效果可以分为有序输送和无序输送。无序输送主要采用输送带的形式,将叶菜由地面输送至收集箱,结构简单,输送效率高,是目前绿叶菜收获过程中主要采用的输送形式,但是由于无序输送,需要后续人工分拣,为了彻底实现“机器换人”作业,需要采用有序输送形式。
有序输送主要采用夹持输送的方式,夹持力的大小决定了输送的成功率和损伤率。夹持拔取力的控制要合理,夹持力过大会造成叶菜的损伤,夹持力太小会导致拔取失败,因而需要对夹持机构进行优化设计,控制夹持力,实现柔性夹持[32-33]。杜冬冬等[11]采用横向输送带式的夹持输送方式用于甘蓝收获机的设计,并通过试验证明了该种输送方式有利于减少挤压破损,提高收获质量。
除了夹持输送方式,周成等[29]对双螺旋输送装置进行设计研究,探索甘蓝收获机拔取输送机构的最佳结构参数和各因素对拔取输送率和切根合格率的影响规律,但该种输送方式只能应用于结球类叶菜。
2.3 叶菜机械收获智能化技术
叶菜收获一直是叶菜生产智能化管理的难点环节,在技术上对精准识别、智能定位、柔性夹持等均有很高的要求,同时农机、农具、农艺、作业等的匹配度也是决定智能化收获的关键因素。随着定位与导航、传感与检测、自动控制和信息处理等技术的发展,收获过程的自动化和智能化已成为叶菜收获的必然趋势[34-35],是解决叶菜收获损伤,提高叶菜收获效率的有效途径。
2.3.1 自动对行技术
由于叶菜收获作业时间较长,收获过程需要驾驶员集中精力来人工对行,驾驶员易产生驾驶疲劳。在收获过程中,收获机对行质量差,易造成漏割、重割、推倒及碾压叶菜植株等现象,造成收获损失大幅增加[36]。自动对行技术在大田作物收获过程中已得到大量应用[37-38],但在叶菜的田间收获应用较少,目前已成为国内学者研究的热点。
目前在农业生产中自动对行技术普遍采用基于机器视觉和全球导航卫星系统两种方法,前者利用图像处理技术识别作物行的方法,进而确定导航基准线,实现农机与作物的相对位置与航向信息的测量;后者利用卫星定位技术实现农机位置的高精度测量,在农业生产中应用最为广泛。而面对复杂的田间环境变化,在位置测量中应用多传感器数据融合技术通常也可以得到更好的测量结果。伍渊远等[39]利用机器视觉技术获取智能叶菜收获机作业过程中所需的导航参数。首先对自主获取导航参数进行研究,将采集的叶菜田图像进行预处理、获取导航离散点,利用稳健回归法对离散点进行线性拟合进而获得导航控制参数,以便收获机调整作业方向。吴华瑞等通过集成农机自主导航、轨迹监测、机器视觉、柔性感应等先进技术,以起垄、移栽轨迹数据为作业底数,利用自主导航和轨迹实时监测实现甘蓝采收的精准对行,通过柔性感应技术实现甘蓝球体大小自动识别和采收履带宽度的动态调整,防止由于甘蓝大小不一造成的采收障碍,利用机器视觉技术实现漏采甘蓝的快速识别,为作业过程中农机具性能调优提供支撑。收获过程由无人驾驶拖拉机带动甘蓝自动收获机实现精准对行,一排排甘蓝依次准确进入自动收获机的采集器中,由高速旋转的割刀将甘蓝的根部切断,割下的甘蓝由升运装置、传送带直接采收入筐。
2.3.2 割台仿形技术
叶菜收获过程对切割的位置要求比大田作物更为严格,无论是土下切根形式还是地表割茬形式,常常会因为切割位置调整不当造成叶菜大量的损耗。因而叶菜割台仿形控制是叶菜机械收获过程中亟待解决的一个问题。为了解决拔取过程中由于地表不平导致的漏切、漏拔,Kanamitsu等引入了一套带有位置伺服控制的高度自动调节器,能根据地面高低起伏自动调整收获机的升降,大大提高了拔取成功率[40]。日本信州大学研制了一款菠菜自动收获装置,该收获装置的根部切割装置具有2个自由度,通过激光测距,在铲根过程中调节切根装置的角度和深度,避免了菠菜的漏切,并采用PID对铲切调节过程进行控制。杨术明等设计了基于超声波传感器的割台高度控制系统,利用PID控制算法解决收割机割台高度调整实时性较差等问题。胡焉为等[41]设计了一种双输入双输出系统,使割台能跟踪地面起伏进行俯仰、摆转调控,实现割台高度自动控制,达到割茬高度一致的目的。
3 存在问题
我国叶菜机械化收获已经成为叶菜生产全程机械化的短板,解决叶菜机械化收获已经成为实现叶菜全程机械化的主攻方向。虽然国内相关企业以及科研机构一直致力于对叶菜机械化收获的研究,但是叶菜机械化收获没有取得实质性的突破,结合我国叶菜生产实际情况,具体问题如下。
1) 叶菜品种丰富,使得收获机械的通用性差。叶菜是品种最多的一类蔬菜,不同类型的叶菜形态各不相同,因而收获原理也有所不同,收获机械的通用性差,导致不同类型的叶菜需要专门的收获机器,增加了机器收获成本。
2) 整个收获过程机械化程度低。目前在国内推广示范的叶菜收获机,往往只解决了收获过程的某些环节,整个收获过程仍需要人工参与完成。以绿叶菜收获为例,目前的机型仅解决了收获过程的切根环节,后续收集、包装仍需要人工完成。为了实现“机器换人”作业,需要整个收获过程实现机械化。
3) 叶菜在收获过程中与机具之间存在互作关系,易产生损伤。叶菜茎叶作为食用部位,柔嫩多汁,极易损伤。在收获过程中,收获机具的相应部件会与叶菜产生相互作用,特别是在夹持拔取输送环节,叶菜受到挤压作用极易产生损伤,加速叶菜的腐烂变质,最终影响叶菜的经济效益。
4) 缺少适宜机械化作业的叶菜种植农艺标准,增加了机械收获的难度。叶菜生产全程机械化离不开各环节作业机具的协调配套,任何一个环节不配套都会影响后面的收获环节。在种植以及后续生产管理过程中,通常依照菜农经验进行种植和管理,现缺少与农机作业相匹配的农艺标准,增加了机械收获的难度,影响了收获机械的工作效率和收获效果。
4 发展趋势
结合我国叶菜机械化收获存在的诸多问题,根据我国叶菜生产具体特点,现总结叶菜机械化发展趋势如下。
1) 实现叶菜收获机械通用化和智能化。加强叶菜收获机械的通用化研究,实现机具的多环节、多品种作业,真正实现“一机多用”,可以提高作业效率,降低作业成本。加强收获机械智能化研究,引入无人驾驶、图像识别、柔性夹持等技术,可以降低劳动强度,减少作业损失。
2) 坚持自主研发国产机具和消化吸收国外先进技术相结合。主动引进国外先进的叶菜机械收获技术,建立适用于我国叶菜生产需求的叶菜收获机械化技术工艺模式,填补关键技术空白、提升薄弱环节,从而推动叶菜生产标准化体系建设,保障叶菜产业健康发展。
3) 实现叶菜的低损伤、高效率机械化收获。研究叶菜与收获机械作用部件之间的互作关系,对叶菜收获机械进行优化设计,采用柔性夹持、喂入量检测等技术,实现叶菜的低损伤收获。对叶菜收获机械进行工作参数优化设计,提高收获效率。
4) 构建完整的叶菜生产全程机械化技术体系。叶菜收获机械化离不开生产机械的标准化和农艺的规范化。虽然近年来国内有些省份和地区针对蔬菜生产相继出台了相应的规范和标准,但是由于叶菜种类繁多、生产环节复杂,使得这些规范和标准存在着生产环节间不配套、区域间不统一、各类标准间不衔接等问题,因而迫切需要建立健全完善的叶菜生产全程机械化技术体系。叶菜生产全程机械化技术体系可以解决叶菜机械化生产的薄弱环节,建立高效的专用叶菜机械化生产技术体系,加快机械化生产进度,发展适合我国国情的叶菜生产全程机械化技术体系。
猜你喜欢
农机使用与维修(2022年7期)2022-07-14
农机使用与维修(2022年2期)2022-02-21
农民致富之友(2019年33期)2019-12-20
北京广播电视报(2019年17期)2019-07-11
婚姻与家庭·性情读本(2018年6期)2018-07-18
现代农业科技(2017年14期)2017-09-06
百姓生活(2017年4期)2017-04-20
江苏农业科学(2016年12期)2017-04-05
饮食科学(2016年11期)2016-12-21
农家顾问(2014年11期)2014-12-01
