
污染水质监测处理一体化无人船的设计与研究
2022-06-21 01:14宋代雨,袁睿麟,周琴,习力洋,赵卫东
计算机时代 2022年6期
宋代雨,袁睿麟,周琴,习力洋,赵卫东



摘 要: 为填补现有水质污染源监测的空缺点,研制了一种一体化污水监测处理无人船。针对设备与控制中心间传输的数据实时性差的问题,采用NB-IoT技术作为二者之间的传输网络。将嵌入式系统、路径计算、窄带物联网等技术紧密结合,通过对多端数据处理与分析,实现了无人船实时数据传输与智能巡航功能。
关键词: 无人船; 水质处理; 环境维护; NB-IoT
中图分类号:TP399 文献标识码:A 文章编号:1006-8228(2022)06-19-04
Design and research of integrated unmanned ship for monitoring
and treatment of polluted water quality
Song Daiyu, Yuan Ruilin, Zhou Qin, Xi Liyang, Zhao Weidong
(Chengdu University, Chengdu, Sichuan 610106, China)
Abstract: In order to fill the gap of existed water quality and pollution source monitoring, an integrated sewage monitoring and treatment unmanned ship is developed. To solve the problem of poor real-time data transmission between unmanned ship and ground control center, NB-IoT technology is used as the transmission network. The embedded system, path calculation, narrow-band Internet of Things and other technologies are closely combined to realize the real-time data transmission and intelligent cruise of unmanned ships through multi terminal data processing and analysis.
Key words: unmanned ship; water treatment; environmental maintenance; NB-IoT
0 引言
生态危机不断为人类生存敲响警钟[1]。我国社会经济不断发展,而随之城镇工业污水和居民生活用水排量逐年升高,致使河流、湖泊等淡水资源污染加剧,流经城镇的一些河段污染普遍严重,部分水体甚至产生了黑臭现象[2]。这不仅损害了周围生态和居民的生活环境,而且成为制约我国社会发展进步和经济发展速度的主要影响因素之一。目前对于水域监测常依赖人工划船进入水域采集水样再到岸上分析检测,这一工程如此进行效率低下[3]。同时,受污染的水域往往存在很多淺水湖,其风险尚且不明,而人工监测水体又具有较大的技术难度,因此,人力难以驾驶船只来对水体进行取样和检测。与传统的人工监测技术相比较,智能化物联的无人船监测系统,大幅度地节约了人工费用,提高监测效率,并能够及时地抵达浅水区域和污染地带等具有潜在危险的水域。
无人船具备小型化、操作简单、效率高、使用便捷、成本低、对监控环境要求低等特性。目前,市面上,大多数的无人船并非真正的“无人船”[4]。由于无线通信技术方案简陋、通信范围近,难以达到2km及以上距离;目前,水质监测方面多数仍采取人工采样与分析,实时性差、耗时长;与污染水体相关应急处理功能缺失,不能自动处理各种突发情况,如对污染水体进行原位修复等。
针对现有问题,本文设计了一款以NB-IoT作为通讯网的一体化污水监测处理无人船,NB-IoT无线通信技术相较于传统GPRS、4G技术具有成本低、低功耗、覆盖范围广的特点,极大地拓展无人船的工作距离。结合物联网技术、嵌入式技术和传感器技术并借助北斗/GPS双模定位等方法,在精确标注无人船位置的基础上,还可以更加快捷、活泛、动态的更改船舶的坐标定位;通过设定投放无人船并结合BP神经网络算法实现对整个监控水域大范围、连续化的监测[5]。
1 设备硬件与软件设计方案
污水监测处理设备是利用NB-IoT物联网技术,实现了集航路规划、自主航行、水质实时监视和检测、图像采集和检测、材料投入、污水处理、远程监视和操作等多功能于一体的,一体化船舶结构。
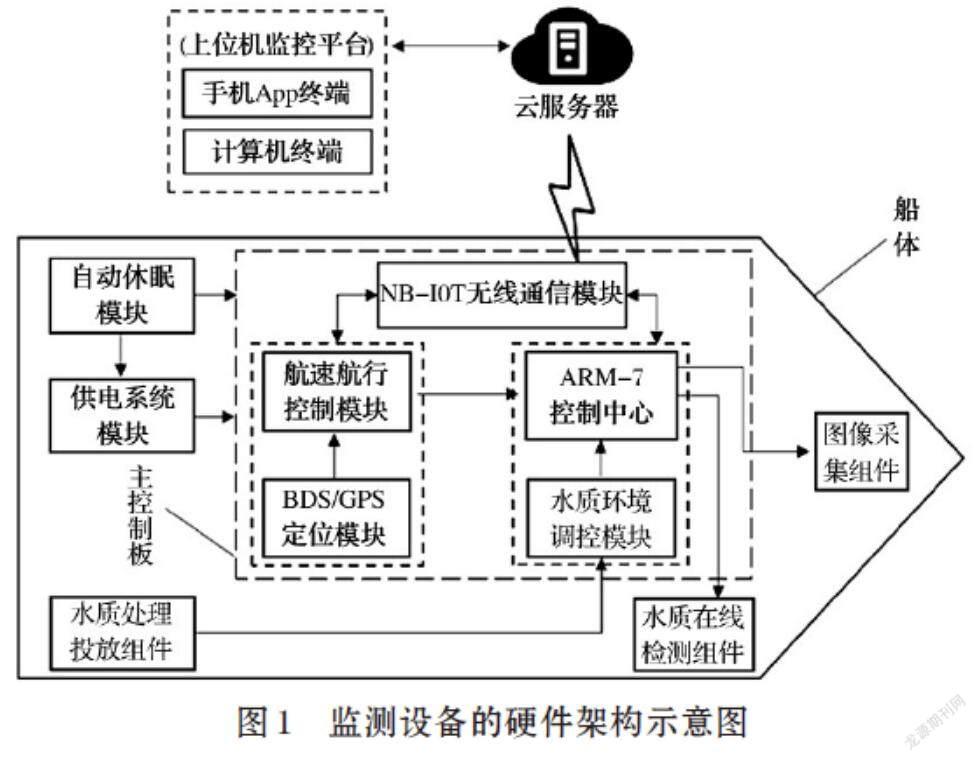
设备按照其功能可划分为三个部分:负责自动巡航、定位和无线通信服务的无人船端;负责对水质、生态环境等各种综合数据的采集与获取分析,以及对水质处理剂投入、进行远程监测和调控的地上终端;负责网络通信服务、数据储存、信息管理等业务的云服务器平台。如图1所示,设备的软硬件组成和分布特性主要有四种类型:主控板与水质检测传感器组件、图像采集组件、水质处理投放组件、移动应用终端与计算机终端。如图2所示,控制设备的软件包括下位机监控系统(嵌入主板)和上位机监控平台(安装在移动应用终端和计算机终端上)两个部分。
2 设备模块设计与实际操作
2.1 无人船主控制板
无人船主控制板是监控设备的核心部件,系统采用ARM系列STM32微处理器作为设备的核心控制器。采用NB-IoT模组BC95作为设备的通信模块,支持串口AT命令;数据传输方式支持CoAP,TCP/UDP和MQTT[6],并且兼具高性能、低能耗等特点;适用于低能耗、广域间距的水质检测和控制系统。根据核心硬件模块设计,将核心控制器的外围区域划分为6个独立的组件功能模块。如图2所示,其功能分别是:远程控制水质和生态监视设备、无线通信、信息的采集和分析、自动化管理、环境调节装置及污水原位处理的控制。核心控制器通过串行外围接口线进行数据通信,实时监测水质数据,每测一组数据,立即传输给核心控制器。核心控制器接收数据后,通过NB-IoT网络与云服务进行交互,使得监控平台可以对无人船数据进行处理,并对控制指令进行传输。
主控板基本上实现了对硬件系统的一种高度整合,能够大幅度地提高系统的抗冲击、防水、防雷等抗干扰的性能,有效地保证了系统运行的稳定性,使得设备更好地适应监控水域的各种任务。
2.2 水质生态监测装置
环境生态监控装置,采用一套集成式控制器与多个检测传感器和图像采集器相连接。主机板内嵌入集成控制器,包括:水质检测传感器控制模块、图像采集器模块、数据采集与分析模块。前两者分别是通过串行接线与探入水中的水质检测传感器和水图像采集器相连,能够实时获取水体的各项指标(T、TDS、DO、COD、pH值和ORP);后者具备对检测到的数据和图像进行储存、预处理、标准化数字输入等功能。
集成式的监测控制器分别采用32GB存储器和RS485、RS232等多种通信终端口,通过NB-IoT通信模块对所收集到的信息数据实时地上传到云服务器,再用Android等技术传输到客户端,方便企业和个体用户随时准确地了解各个区域的水质环境,并为其提供了水质监测保障,为控制模块的运行提供了基础。
2.3 水质处理及投放设备控制
环境控制模块采用多通道与数控技术,当主控制器对外部水环境进行检测后得到的检测值数据进行分析时,微纳米水处理装置和水处理剂投放装置通过传感器连接线连接开关控制单元。根据监测分析结果,通过无线通信模块向设备控制单元中的可编程控制器发送指令,对现场设备的开关进行控制或改变其相关设置,完成处理剂投放,继而实现水质和环境的生态维护,以便更好地保护水资源。
2.4 无人船自动控制
无人船自动化控制系统主要构成的软硬件包括:推进装置(内容包含无人船航行与航向控制模块)、GPS/BDS定位、转速传感器,主要负责实现无人船的航向控制、航速驱动力、即时定位等功能。
用户可通过上位机监控平台系统,根据所有相应参数来自动设置任务目标的启用、航运时间、航速等各项指令,并每6S自动向下位主控制板终端上传数据。主控板在接收到监控管理平台直接发送的视图指令后,首先对所处的特殊地理位置信息进行帧数据包装并传递给云服务平台,其中信息包括无人船当前的平均航速、移动方式、位置等状态。接着对船舶当前的导航信息进行综合分析评估,向规定船舶航速的控制导航模块发布导航指令,控制该船在预定航线上往返。在船舶抵达到指定的巡航位置后,就会自动开启监测和巡航的功能,当完成自动监测和巡航的任务后,将继续向下一指定地点巡航。
通过将无人船远程监控平台安装在计算机或移动应用终端上,建立了计算机、移动终端与监控无人船之间的通信。实时访问/查看水质生态监测情况、动态管理控制数据和无人船巡航状态,实现了对任务目标的远程集中定点监测与处理控制。
2.5 远程监控平台
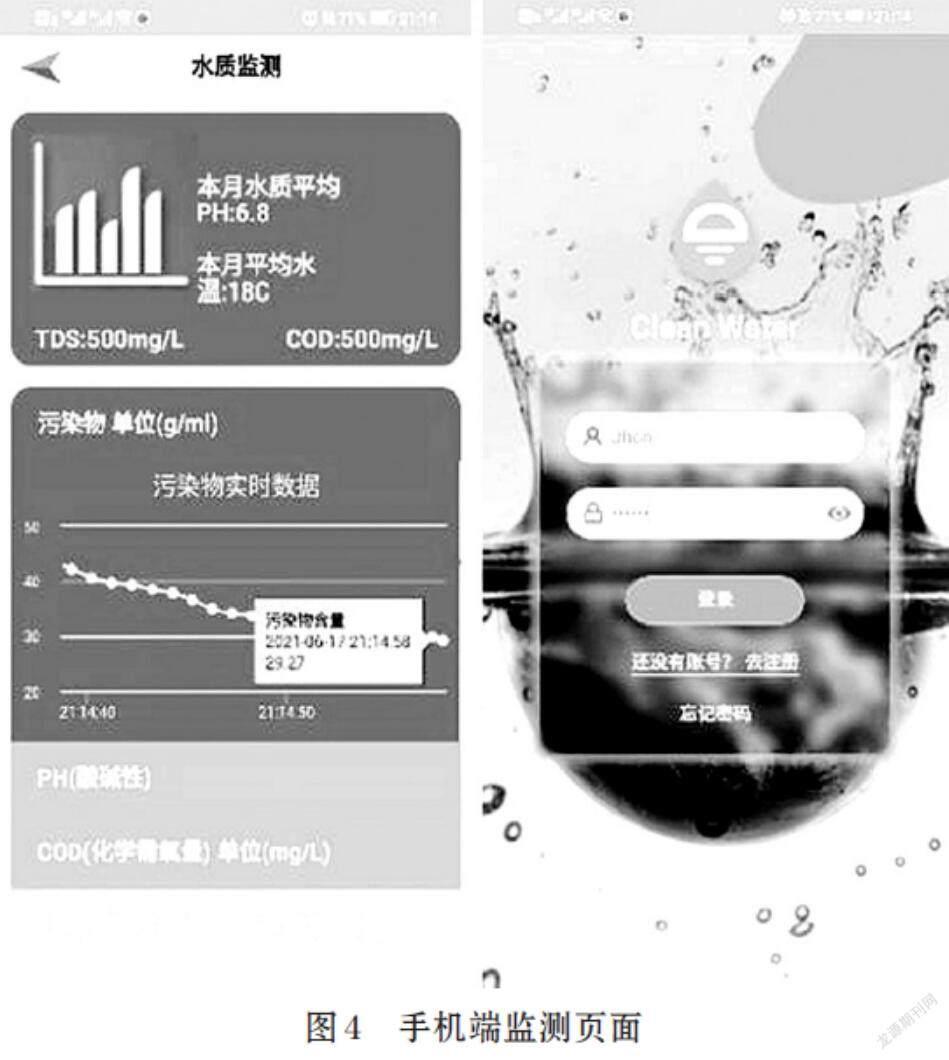
监控平台采用一种分层B/S系统架构设计,运用信息融合技术、组态技术、图像数据压縮及图层优化等新技术,实现了数据存储、设备管理、远程互联、用户管理等多项功能。该系统中嵌入了动态域名的分析和管理功能,便于使用者通过NB-IoT无线通信方式部署各种分布式的应用系统,并且可以通过Android来实现对感知终端的低成本远程管理和监测功能,如图4所示。
3 实物试验与数据对比分析
项目已经制作出实体模型,主控制板和整个船体都采用高强度密封材料,所有外部端接口以及缆线均采用高级防水防护套件材料进行防水加固处理,在充分保障船舶防水性能的基本前提下,可以较大幅度地提高在野外时船舶有效抵御水流干扰的能力,从而达到专业化的野外防护性等级。
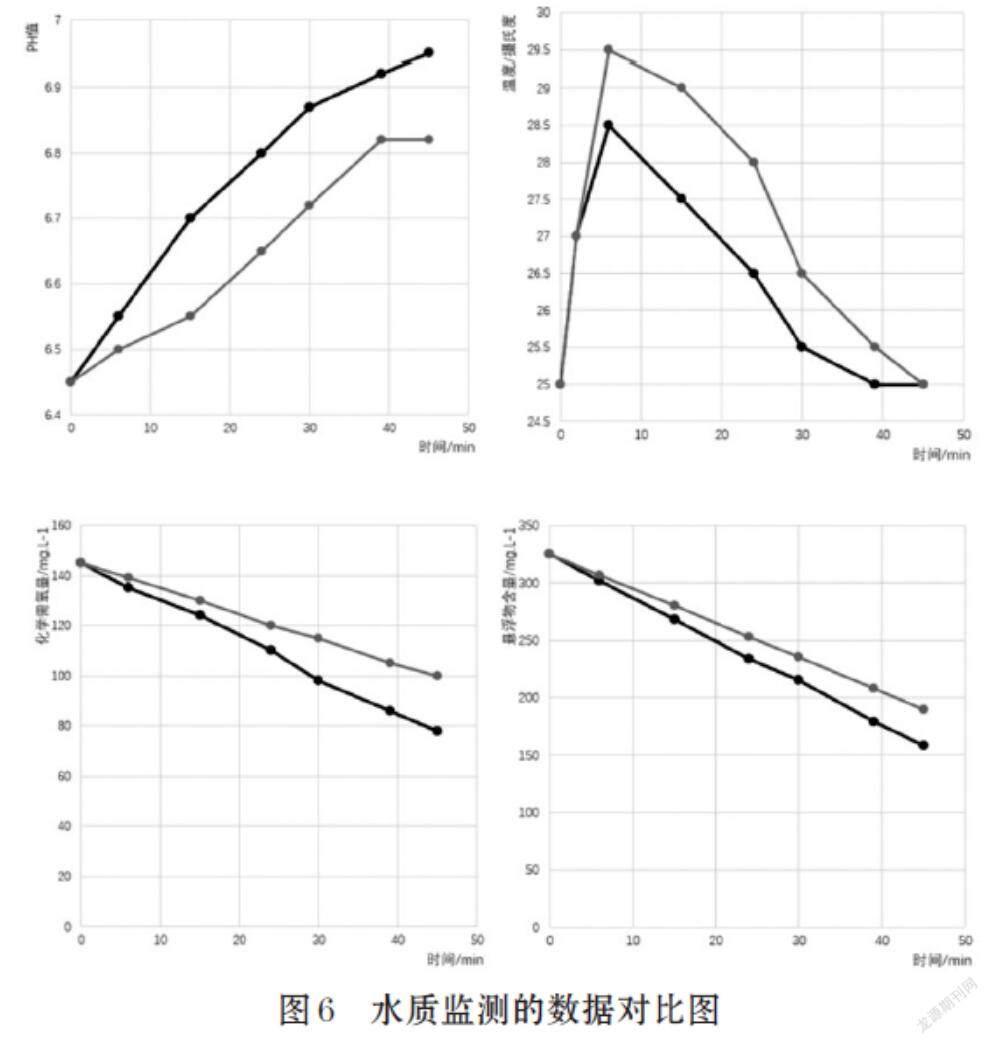
项目团队对成都某废弃小型河道进行了水质的监测及处理,并与传统处理方式进行对比。如图6所示,为我们在监测中数据的对比图,深色曲线为我们实验的数据,浅色曲线为传统处理的数据,实验结果表明:由于搭载新型纳米催化材料,pH值上升速度、化学需氧量、悬浮物含量下降速度比传统处理方式处理速度更快,污染物处理的剩余量更小,可操作性更强。
4 结束语
本项目依托科研立项,打造一款应用于小型河道、湖泊等污染水水域的无人船。硬件技术采用NB-IoT技术,软件采用安卓通信,利用硬件传输器传输的信息来达到信息可视化,通过对多端数据处理以及分析,实现了对无人船控制的精确管理。由于船体的小型化、低成本、高可靠的优点,使得小型化船舶具有较高的实用价值。
实践表明,该无人船运载新型催化材料处理污水效果非常好,各项性能更加突出,处理效果十分明显,处理速度快、剩余污染物少,具有很好的市场前景和研究价值。
参考文献(References):
[1] 罗建军.水质自动监测技术在水环境保护中的应用[J].资源节约与环保,2021(8):9-10
[2] 罗刚,张然.无人监测船在城市内河水质监测中的应用[J].环境监控与预警,2017(1):18-31
[3] 钟全春,韩桂明,杨竣皓,等.水域监测船系统设计[J].电子世界,2017(12):118-122
[4] 赖俊委,岑佳潼.基于物联网通信技术的水质检测无人船[J].通信电源技术,2018,35(2):188-189
[5] 姜沣珊,岳中杨,程俊颖,等.利用BDS与无人船进行污染源分析及处理[J].测绘通报,2020(2):155-159
[6] 葛新越,王宜怀,周欣.GA-BP神经网络在NB-IoT水质监测系统中的应用研究[J].现代电子技术,2020(24):30-37
