基于PWM控制技术的电液比例阀的研究
2022-06-24 18:03黄圆志
科技资讯 2022年11期
黄圆志
摘 要:该研究针对采用放大器驱动板和控制器的传统掘进机电液比例控制系统在实际使用中存在着稳定性差、控制精度低、故障率高等缺陷,提出了基于PWM技术的电液比例控制方法,即采用CANopen通信协议,组建通信系统和PWM信号直接驱动控制比例阀,它通过对控制器的输出电流进行反馈保证了控制精度,通过对特性曲线和响应参数的设计以耦合不同场景应用。实际运行结果表明,该电液控制系统性能稳定,运行可靠,有良好的应用前景。
关键词:PWM控制技术 电液比例阀控制单元控制精度
中图分类号:F205 文献标识码:A 文章编号:1672-3791(2022)06(a)-0000-00
Research on Electro-hydraulic Proportional Valve Based on Pulse Width ModulationControl Technology
HUANGYuanzhi
(Lanzhou Resources &Environment Voc-Tech University,Lanzhou,GansuProvince,730021 China)
Abstract:In view of the defects of poor stability,low control accuracy and high failure rate in the actual use of the traditional tunneling electro-hydraulic proportional control system with amplifier driving board and controller,an electro-hydraulic proportional control method based on pulse width modulation technology is proposed,thatis,the communication system and pulse width modulation signal are established by using CANopen communication protocol to directly drive the control proportional valve,By feedback the output current of the controller,it ensures the control accuracy of the electro-hydraulic proportional valve,makes parametric programming for the characteristic curve and time response of the valve,improves the system performance, and can better adapt to different load applications.The actual operation results show that the electro-hydraulic control system has stable performance,reliable operation and good application prospect.
Key Words: PWM control technology;Electro-hydraulic proportional valve;Controlunit;Control accuracy
当前进入新的科学技术发展时期,电子技术以及与其相关的信号检测、处理、传输等技术得以提升。一般而言,在传统掘进机通过电液比例技术结合放大器驱动器以及控制方式,通过通信协议予以完成。然而在现实中,程序运行和信息校验过程较为复杂,占用大量运行时间,导致比例阀稳定性差,由此引发故障。为了提升系统运行效果,PWM(脉冲宽度调制)电液比例控制技术被引入。该技术将输入的信号进行编码,获得对外驱动的控制信令信号,通过数字控制来提升整体稳定性。为了实现优化控制,依托编码程序控制来对输入的信令来进行跟踪补偿,结合PID控制器来进行调节,对其电磁阀的响应速度、控制精度和开口大小进行优化控制,从而实现系统稳态性能、动态性能等进行很高程度的加强[1]。
1电液比例阀及驱动及其发展现状
1.1 电液比例阀及驱动概念
作为当前最为先进的控制技术,比例控制电液控制的主要组成为比例电液阀,其实现电子和液压之间的连接,从而能够对复杂指令的处理,以实现稳态可攻至信号的输出,实现优化控制[2]。
比例电液阀从硬件结构看,是一个液压元件,产生与控制阀芯位置成比例的磁力,并通过类似于比例阀芯电磁阀的信令信号来控制载量和压力的响应。通常,普通液压阀只能控制预定义液体流量的压力和流量。在这一类控制设备的运行中,采用普通液压阀是难以对控制载量和压力的响应进行自适应调节的[3]。
1.2 电液比例阀及驱动发展现状
PWM驱动器广泛应用于自动控制、电气工程等领域。安装可靠的驱动器对控制系统非常重要[4]。目前,大多数电动比例阀制造商都配备了一种特殊的驱动装置——比例放大器。该机械部件会在断电的过程中出现比例设置放大器驱动阀负载,这导致两端的应力尖头释放非常高。由开关组成的PWM驱动器的优缺点不仅关系到设备本身,也关系到负载性质等因素,电源电路稳定性等。
在该电路中,负载驱动器的比例PWM阀是一个感应负载,穿过电路的线路包含感应散射。我们知道,如果负载包含感应,则切换传输电路的过程将非常不同。由于诱导轮固有的内部储能特性,瞬时链的折断会导致高频和高振幅振荡,从而对系统本身造成严重的电磁干扰,影响系统的正常运行,严重影响系统的安全和各方的使用寿命。为确保电路可靠运行,传感器负载可防止电路在停机期间对系统产生电磁干扰(EMI、电磁干扰)。为此减弱传输通道上方的这些高频电压干扰则显得极为关键,例如:通过创建过滤器来抑制模拟器和差分模式中的电磁干扰,但这种方法只能过滤特定频率范围内的噪声[5]。增加缓冲吸收电路和电压限制方法,改变过程中产生的过电压由缓冲吸收电路维持,吸收电路将变化损失从装置内部转移到阻尼电路,以避免装置上的过度热损失。然而,这种方法不仅增加了系统的额外成本,而且增加了一些RCD吸收电路所吸收的功率;另一方面,使用的阻尼電路很容易与其他设备传递。如果吸收电路参数不合理,将导致更大的振荡,并由于二极管的固有特性而增加电流和电路过电压[6]。因此,有必要找到一种更有效的方法来解决由PWM驱动器引起的IME负载消除问题。250460BF-818D-4010-ABDD-39EB0C58E054
2硬件与软件
2.1硬件结构设计
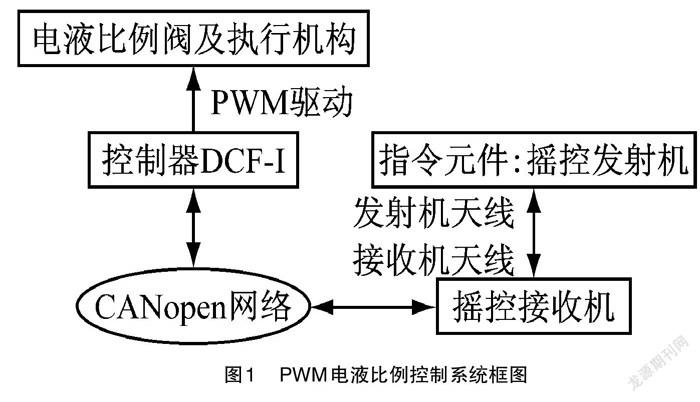
PWM电液比例控制系统由HAWE防爆液切换阀和执行机构、InterControl控制器组成,远程接收器和指挥单元(HETRONIC遥控系统)。指令单元(遥控发射机)发出指令后,遥控接收器通过CANOPEN通信网络接收和传输DCF-I控制器,在内部操作后,它使用其PWM输出接口来控制比例阀和执行机构,这减少了其他硬件控制和电动液压比例阀的数量,显然实现了设备的安全性能的极大提升,并进一步地提升了产品生产装备效率,实现了产品成本的深度削减。该结构对应的整体系统框图如图1所示。
2.2软件设计
Rampancurve控制模块采用PWM12P研究控制器的PWM工作原理和控制策略,因素分析,影响电液比例阀的动态响应、稳态精度和孔尺寸,用于参数化编程的电比例阀的特性和响应时间,并设计了控制方案,为行走机械和悬臂机构的实际掘进选择最佳控制参数阀门电气比例的动作模式实时可靠控制。
3影响电液比例阀性能参数
3.1比例阀启动控制
电液阀的启动时间主要与通信系统的传输速度和PWM输出信号的频率有关。PWM输出频率的大小决定了比例阀的动作速度,与阀的大小和比例速度成正比PWM频率的增加降低了比例阀线圈的频率,以保持电流波动,但如果PWM频率过高,电路扰会增加,需采取优化PWM频率的相关措施,减少比例阀绕组中的电流波动和电路中的电磁干扰。在保证比例阀可靠吸收的情况下,应用低频PWM可以降低比例阀线圈的功率,提高比例阀关闭时的反应速度。端口PWM频率控制器设置50~1200 Hz范围,每个通道可单独设置.综合考虑提高阀门效率和可靠性的因素,将8个PWM端口的输出频率设置为400Hz,瞬时循环时间为2.5ms。
3.2比例阀控制精度
比例阀的控制精度与输入信号的精度和比例阀线圈的位移有关。目前,无“煤矿安全证书”来移动与电液成反比的阀门,主要通过优化管理过程。PWM的控制输出信号由PID调节.通过实时补偿调节器的流出电流,避免了电液阀开路时电磁电阻变化的影响,在保证输出信号精度的同时,比例阀在达到设定值时工作,延长了比例阀的使用寿命。具体实现方法:在确定程序总变量时,根据理论分析和经验确定PWM控制单元中的PID参数。
运动控制输出的比例大小与误差大小成正比,误差百分比达到P值,则动作结果为100%。控制器的PWM输出范围为0~1800mA。当P定义为0.05%,PS范围乘以0.9mA时,比例作用输出为100%。对于每一个变化为1mA的错误,比例动作输出变化为111%。KP值越高(P值越低),尺度效应越强,动态响应越快,纠错能力越强。由于实际系统的惯性,在改变可控输出后,实际值会慢慢改变。在定量计算的基础上,并根据系统响应,对KP值从小到大进行调整,最终为100。
完整动作的引入将消除静态错误,将实际PV值实现为指定的SP值,并确保其匹配。消除静态误差的动作积分原理是,在有误差的情况下进行误差积分,使输出连续增减,直至误差为0,积分不停止,输出不变,系统光伏值保持稳定,而光伏值等于SP值,达到无误差效果.将融合时间由大变小,也就是从童年变大。观测系统的响应可以快速消除误差,达到设定值而不产生任何波动。最后,TI值的定义是10。
然后调整比例动作和全动作。对于由负载变化或值变化引起的干扰,只有在产生误差后才能消除调整。差动动作是预先的预防性控制,即一旦确定PV有变大或变小的趋势,它将立即发出控制信号以避免改变,以避免重叠或重叠。针对当前的控制技术而言,通常TD对应数值越大,其对应的微分作用越强,而反之对应的TD越小,则表现为微分作用越弱。根据这一特性,我们将TD差分时间从小到大进行调整,最终确定TD值为100。
4试验结果与分析
为了验证软硬件理论设计在整个设计在技术上的可行性和有效性,该文根据上述组成结构进行了多次重复实验。从而不断提升整体效果。具体而言,该文对指挥单元手柄的动作大小进行详细统计,电磁阀输入电流和启动时间等进给参数时,指挥单元发出指令,悬臂动作时间,履带行程比例响应阀小于0.8 s。在此基础上,依托预设的PC控制器PWM端口电流值结合实测装置,来对比两个结果之间的差异,从而来确定控制精度。
5结语
通過研究分析,可以了解电子磁通阀在装置运行过程中的动作效率和精度对整个系统的性能影响情况。对此该文在此基础上提出了采用PWM液压控制技术来进行调节,其可通过对输入的模拟信号编码为稳态的数字信令从而为稳态控制提供了鲁棒的控制信号,这对整个系统的稳定控制提供了优化控制效果。同时也对该文设计的方法提供了有效的技术支持。
参考文献
[1] 康永玲.基于PWM技术的电液比例控制系统的研究及应用[J].煤矿机电,2017(2):28-32.
[2] 吴建华.电液比例阀闭环控制技术的应用与维护[J].设备管理与维修,2020(11):72-74.
[3] 汤澍.并联旋压机随动压边装置电液比例协同控制系统研究[D].上海:上海交通大学,2020.
[4] 王永超.基于电液比例控制的装载机工作装置系统研究[D].长春:吉林大学,2018.
[5] 罗艳蕾,杜黎,周山旭,等.基于模糊PID的冲裁机电液比例位置控制系统仿真研究[J].机床与液压,2021,49(22):160-163.
[6] 陈立娟,彭泽钦,孙家庆,等.先导式电液比例阀非线性位置自适应补偿控制[J].液压与气动,2021,45(8):64-71.250460BF-818D-4010-ABDD-39EB0C58E054
猜你喜欢
中国自行车(2022年3期)2022-06-30
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
读写算·高年级(2017年4期)2017-04-15
爆笑show(2016年5期)2016-06-23
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21
科技传播(2012年10期)2012-06-06