
基于改进Canopy-FCM的光伏电站动态特性聚类算法
2022-06-24 10:02郭易鑫倪光捷贺鹏远孙惠娟
计算机应用与软件 2022年4期
郭易鑫 韩 霞 倪光捷 贺鹏远 孙惠娟
1(国网山西省电力公司 山西 太原 030021) 2(国网信通亿力科技有限责任公司 福建 福州 350003) 3(福建网能科技开发有限责任公司 福建 福州 350003) 4(华东交通大学 江西 南昌 330000)
0 引 言
随着全球化石能源的逐渐枯竭,可再生能源已受到人们的广泛关注。大型光伏电站并网建设成为全世界发展的趋势[1]。光伏发电系统通过具有快速响应特性的电力电子器件实现功率输出,其动态特性完全取决于逆变器及其控制系统的性能。随着电网磁导率的增加,电网的动态特性会发生变化[2-4],进而影响电网的安全稳定运行和故障后保护装置的配置。因此,对并网光伏电站进行精确建模和动态性能分析具有重要意义。
详细的设备级模型[5-7]可以精确地模拟光伏电站的动态特性。然而,该电站包含了大量的电力电子设备,详细模型过于复杂且求解效率不高。为此,研究人员对光伏电站等效建模进行了大量的研究。文献[8]在所有光伏电池的工作模式和负荷分布相同的条件下,得到了光伏电站的双机等效模型。文献[9-10]在所有逆变器类型相同的理想情况下,建立了光伏电站等效模型。考虑到光伏电站逆变器种类繁多,负荷分布不均,文献[11]将并网逆变器的控制参数和滤波参数作为聚类指标,计算它们之间的距离,具有相似距离的光伏单元被合并到一个等效体中。文献[12]基于K-means聚类算法的聚类指标考虑了灵敏度问题,有效地提高了聚类精度。此外,光伏电站的动态性能也会受到特殊装置的影响。考虑到逆变器中同步功率控制装置的动态特性,文献[13]提出了一种大型光伏电站等效模型。文献[14]基于有功、无功的自适应控制方法估计了逆变器与电网之间的等效电阻和电抗,可用于光伏电站聚类后等效建模。
大多数光伏电站的动态特性主要由逆变器及其控制回路决定[15]。逆变器的控制参数和滤波参数对光伏电站的动态特性起着重要的作用。对光伏电站进行聚类时,聚类参数欧氏距离较小的光伏机组往往被归为一类,聚类结果不准确。一些学者采用更复杂的K-means和FCM算法进行聚类,以提高聚类的准确性。由于初始聚类中心的随机选择和聚类的数目可能导致算法陷入局部最优,需要对聚类结果进行重复验证,增加了计算复杂度。为了在不损失精度的前提下减小计算规模,迫切需要探索更能准确表征光伏电站动态性能的聚类参数。同时,有必要研究和应用更有效的聚类方法。
本文深入分析了并网光伏电站的建模方法和控制策略原理,通过推导控制系统的传递函数,确定了并网光伏电站的聚类参数。首先,采用Canopy算法处理初始聚类中心的数据和聚类数目。然后,结合传统的FCM聚类算法得到聚类结果。接着,使用等效方法对一个类别中的PV单元进行建模。最后,通过仿真实例,比较了等效模型和详细模型在不同故障条件下的动态特性,验证了本文所提的大型光伏电站等效建模方法的有效性。
1 并网光伏发电的聚类指标
1.1 并网光伏发电的数学模型
大型光伏电站设备众多,元件性能各异,典型的并网光伏电站结构如图1所示。为了实现太阳能的有效利用,并网逆变器经常采用MPPT单元功率因数控制来实现有功功率的最大输出。为了便于分析,将三相静态abc坐标系中的数学模型转换为同步旋转dq轴上的模型[16]。典型的控制策略如图2所示。其中:R和T分别表示照明强度和温度。采用单电感滤波输出[17],Lf为滤波电感,if为流过滤波电感的电流,则ug为电网侧电压,ui为逆变器交流侧电压,r为等效电阻,计及滤波电感内阻和逆变器开关。

图1 并网光伏电站的结构

图2 逆变器控制策略示意图
频域内逆变器的输出电压方程为:
(1)
图3中,系统模型耦合在d、q轴上。为了便于控制系统的设计,采用了前馈解耦策略削弱耦合。在逆变器的交流侧,分别将-Lfωifq和-Lfωifd添加到d轴和q轴中,以抵消耦合项。解耦后的系统模型为两个独立的等效部分,如图4所示。

图3 并网光伏系统模型

图4 解耦后的系统模型
由于逆变器的开关频率远大于电网频率,逆变器的放大特性可以用比例增益kpwm表示[18]。采用电压前馈补偿,消除电网电压对并网电流控制的不利影响。解耦后的电流环d轴控制结构如图5所示。

图5 电流环的控制结构
PI调节器的传递函数为:
(2)
因此,电流环的闭环传递函数如下:
(3)
由于电流环的闭环传递函数在d轴和q轴上是一致的,本文仅对d轴电流的动态特性进行了分析。等效电阻r相对较小,可忽略不计。
1.2 聚类指标的选择方法
完成不同光伏单元的聚类是光伏电站等效建模的前提。并网逆变器的控制参数能在一定程度上反映系统的动态特性,但逆变器的控制参数和滤波参数未知,仅以控制参数作为聚类指标的聚类方法不严格。当给出各参数的灵敏度系数和权重系数以区分不同参数对动态性能的影响程度时,也存在仿真误差和人工判断误差。系统传递函数是对其动态特性最直观的数学表达。通过推导并网光伏系统的传递函数,建立了等效聚类指标,并通过算例比较,验证了等效聚类指标的有效性。由式(3)得到的d轴闭环传递函数的零点和极点如下:
(4)
随机改变kp、ki和Lf值后,零点和极点的分布如表1所示。在表1中,第2、第3和第4组仅在kp、ki和Lf上与第1组不同,其他参数相同,但系统中零点和极点的分布差异很大。第5组kp、ki和Lf值与第1组差异较大,但它们的零点和极点分布几乎相同。根据五组数据表示的传递函数,绘制相应系统的单位阶跃响应曲线,如图6所示。由图6可知,具有相似零点和极点的系统具有相似的动态响应曲线。

表1 系统零极点分布
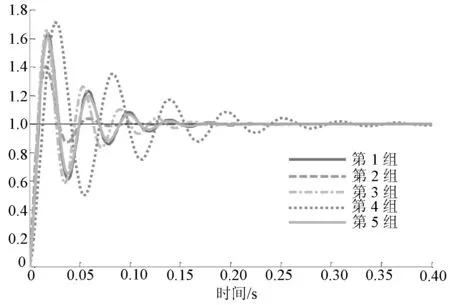
图6 系统动态响应曲线
上述分析表明,系统闭环传递函数的零、极点与其动态特性密切相关。本文采用闭环传递函数的零极点表达式作为聚类指标对并网光伏系统进行聚类,对于上述描述系统,聚类指标是一个三维向量,即X=[x1,x2,x3],其中:
(5)
2 聚类算法与等效模型
2.1 传统FCM算法
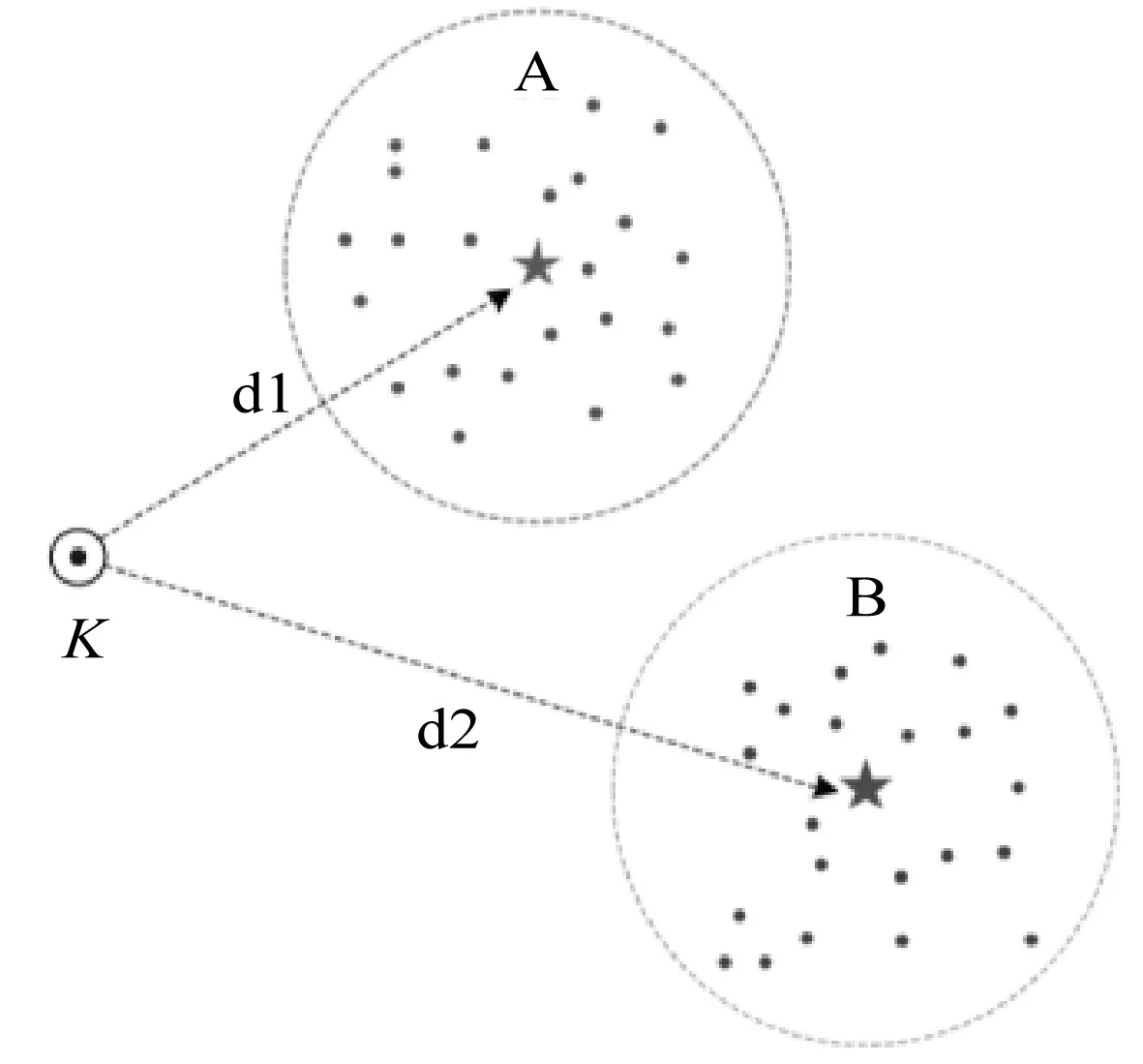
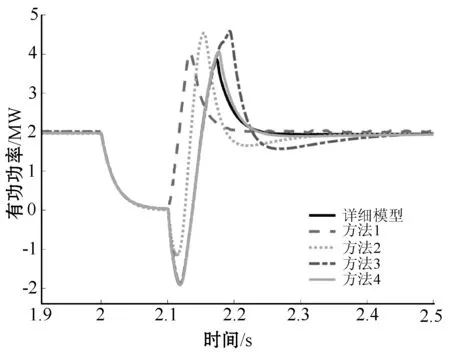
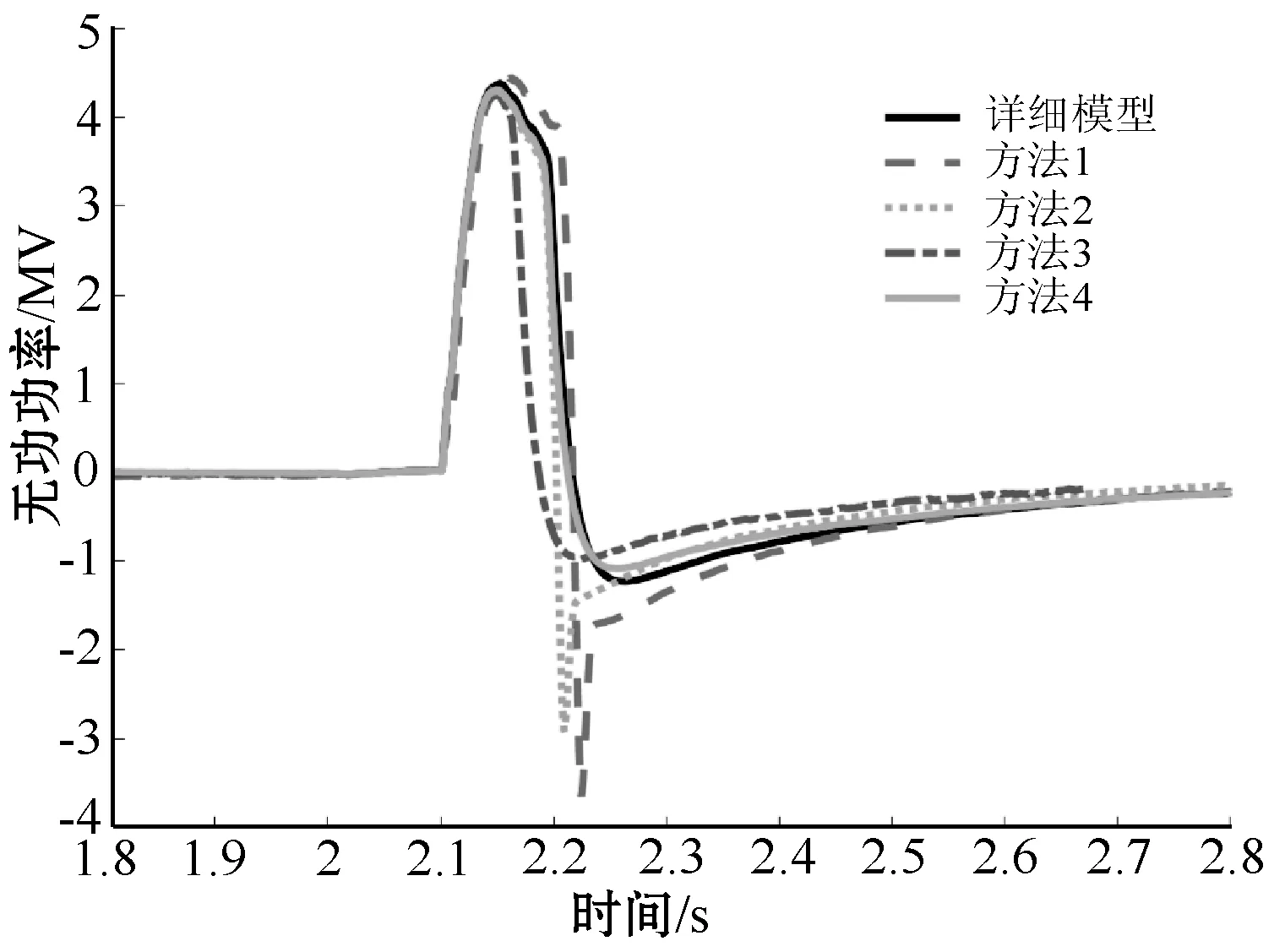
FCM算法以样本点到聚类中心的欧氏距离之和为目标函数,建立满足约束条件的迭代方程,根据隶属度矩阵确定样本属性。假设有n个样本[x1,x2,…,xn],每个样本空间的维数为s,传统FCM算法中,首先确定c个初始聚类中心[v1,v2,…,vn],(c (6) 式中:uij表示第j个样本相对于第i个聚类中心的隶属度值。m是模糊系数,通常取2。dij=‖xj-vi‖表示从第j个样本到第i个聚类中心的欧氏距离。采用拉格朗日乘子法求出式(6)的极值,隶属度和聚类中心的迭代公式分别为: (7) (8) 迭代计算式(7)和式(8),直到迭代误差满足‖v(k+1)-vk‖<ε(k为迭代次数),停止迭代,输出聚类中心和隶属度矩阵,将每个样本的最大隶属度值对应的聚类中心作为样本的归属属性,得到聚类结果。 传统FCM算法的初始聚类中心是随机生成的。如果初始聚类中心选择不合理,算法很容易陷入局部最优解。此外,还对FCM的聚类数目进行了人为确定。在图7中,聚类的数量被设定为2,并且所有数据被分为两类。点K和两个聚类中心之间的距离分别为d1和d2,d1 图7 FCM聚类示例图 图8 初始聚类过程示意图 Canopy算法的具体步骤如下: (1) 获取初始聚类数据集M,确定两个距离阈值T1和T2,使T1>T2。T1和T2通过交叉检验方法确定。 (2) 从M中随机选择一个未分类的数据点P作为聚类中心。计算M中其他数据点到P点的欧氏距离d。 (3) 如果d≤T2,将数据点和P点归为一类,从M中删除数据点;如果T1≤d≤T2,将数据点和P点归为一类,并保留该数据点。 (4) 重复步骤(2)和步骤(3),直到M为空。数据经Canopy算法预处理后,用FCM进行聚类。这避免了盲目选择初始聚类中心和聚类数目,并大大降低了计算复杂度。 完成光伏系统聚类后,需要将光伏单元等效处理。参考文献[19]描述的等效后计算系统参数的方法。聚类和等效过程如图9所示。 图9 聚类和等效流程图 在对光伏电站的等效性进行重新计算后,建立了光伏电站的等效模型。将等效模型的动力响应特性曲线与原模型进行比较。为了量化动态响应曲线的固有误差,建立误差量化指标,其计算式表示为: (9) 为了验证上述聚类和等价方法,本文在PSCAD/EMTDC平台上建立了一个2 MW光伏电站的详细模型。光伏电站共有15个光伏阵列,容量130 kW。光伏阵列通过逆变器、变压器和电缆连接至PCC点,通过单回架空线路送至110 kV变电站,然后通过架空线路连接至电网。并网逆变器采用MPPT单位功率因数控制策略。聚类后建立光伏电站多机等效模型,如图10所示。等效对象的数量随聚类指标和聚类方法的不同而变化。各光伏机组的基本参数及等效聚类指标见表2。 图10 并网光伏电站的仿真模型 表2 光伏机组基本参数 续表2 为了验证本文提出的聚类指标和聚类方法的正确性,本文采用以下四种方法对上述实例系统进行聚类: 方法1:选取逆变器控制参数kp、ki和滤波参数Lf作为聚类指标,采用传统的FCM算法进行聚类,聚类数目被人为设置为2,随机选择初始聚类中心。 方法2:选取逆变器控制参数kp、ki和滤波参数Lf作为聚类指标,采用Canopy-FCM算法进行聚类。 方法3:选择基于系统闭环传递函数的零点和极点获得的等价聚类指标,采用传统的FCM算法进行聚类,聚类数目定为2。 方法4:基于系统闭环传递函数的零极点获得的等价聚类指标,采用Canopy-FCM算法进行聚类。 为了得到比较可靠的结果,在使用FCM算法进行聚类时,本文多次运行程序,直到两次运行的结果相同。聚类结果如表3所示。 表3 聚类结果 无论使用哪种聚类指标,Canopy-FCM算法都将第5组数据判断为离群值,这些离群值聚集成一个组,整个光伏系统聚集成三个组。由表3可知,初始聚类中心的随机选择导致程序运行次数大量增加。 根据聚类结果,在PSCAD中建立了四种聚类方法对应的光伏电站等效模型。此外,建立了详细模型进行比较。 3.3.1三相短路 系统工作正常,在2 s时,PCC点发生三相短路,0.1 s后短路消除。系统有功和无功功率的变化如图11所示。 (a) 有功功率 (b) 无功功率图11 功率曲线 在图11中,基于等效聚类指标和Canopy-FCM聚类算法的等效模型在三相短路情况下的功率变化曲线更接近于原模型。从模拟操作的2 s到3 s,等距采样50个点。通过式(9)计算了等效模型与详细模型之间的有功功率和无功功率误差。为了证明该算法在效率上的优越性,记录的系统运行时间包括聚类时间和仿真时间。对于使用FCM算法的聚类,聚类时间是多次运行时间的总和,结果见表4。 表4 三相短路情况下的误差和运行时间 方法2的等效模型误差小于方法1,说明Canopy-FCM聚类方法具有较好的聚类效果。方法3中等效模型的误差小于方法1,说明等效聚类指标比原聚类指标更有效。方法4将等效聚类指标与Canopy-FCM聚类方法相结合,建立的模型误差相对较小。此外,可以看出,模型经过聚类和等价后,可以大大缩短仿真时间。在总体运行时间上,Canopy-FCM算法优于FCM算法,进一步验证了本文提出的聚类指标和聚类方法在提高仿真效率的同时,在一定程度上减小了聚类误差,提高了等效模型的精度。 3.3.2单相短路 为了验证模型在不对称故障下的有效性,在系统中加入了单相短路故障扰动。系统运行正常至2 s时,PCC点发生单相短路(A相),0.1 s后故障消除。A相的电压和电流如图12所示。与三相故障类似,在单相故障情况下,用方法4建立的等效模型的A相电压、电流曲线与原模型更加一致。仿真误差及运行时间见表5。结果再次表明了本文所提聚类指标和聚类方法在仿真精度和运行时间上的优越性。 (a) A相电压 (b) A相电流图12 电压曲线和电流曲线 表5 单相短路情况下的误差和运行时间 3.3.3电压干扰 为了分析本文提出的聚类指标和聚类方法在小扰动下的有效性,将电压扰动应用于稳定运行系统。系统正常运行至2 s时,PCC点电压从10 kV降至9 kV,0.3 s后恢复正常。光伏系统有功功率输出的变化如图13所示。从模拟操作的1.9 s到2.5 s,等距采样50个点,所得误差和运行时间如表6所示。 图13 有功功率曲线 表6 电压扰动情况下的误差和运行时间 通过对有功功率曲线误差和运行时间的比较,证明了本文提出的聚类指标和聚类方法在小扰动情况下的有效性。 综上所述,与传统的聚类指标和FCM聚类算法相比,本文提出的表征光伏系统动态特性的参数选取方法更加科学。Canopy-FCM算法避免了初始聚类中心和聚类数目的盲目选择。基于等效聚类指标和Canopy-FCM算法的光伏电站等效模型能更准确地描述不同类型扰动下光伏电站的动态特性。 本文详细介绍了光伏并网发电系统的数学建模方法,基于并网逆变器及其控制系统的数学模型,建立了基于闭环传递函数零极点表达式的等效聚类指标。通过仿真验证了所选指标的合理性。为了改善传统的FCM聚类算法,采用低复杂度的Canopy算法生成FCM聚类的初始聚类中心和聚类数目,从而提高聚类精度,减少计算量。 算例结果表明,本文建立的等效聚类指标能够更准确地表征光伏电站的动态性能。与传统的FCM聚类算法相比,本文提出的Canopy-FCM算法避免了聚类中心和聚类数随机选择的缺陷。为了简化分析,本文建立的等效聚类指标是基于MPPT单位功率因数控制策略的光伏并网逆变器。对于其他控制策略,可以使用类似的方法进行分析。本文在研究光伏电站的聚类指标时,进行了部分简化,后续可进行更加详细的分析。2.2 Canopy-FCM算法

2.3 光伏系统的聚类与等效模型


3 实验与结果分析
3.1 算例介绍



3.2 聚类结果

3.3 仿真分析






4 结 语
猜你喜欢
汽车实用技术(2022年4期)2022-03-07中国计算机报(2021年10期)2021-04-27华东师范大学学报(自然科学版)(2019年5期)2019-11-11智富时代(2018年5期)2018-07-18智富时代(2018年5期)2018-07-18电子技术与软件工程(2016年23期)2017-03-06中学生数理化·七年级数学人教版(2016年6期)2016-05-14海峡科学(2013年3期)2013-10-21数学大世界·小学低年级辅导版(2010年4期)2010-03-25
