高加速精密运动平台前馈控制研究*
2022-06-24 03:10胡永珊罗志良刘志军谢求泉柳志林
机械工程与自动化 2022年3期
胡永珊,罗志良,刘志军,文 虹,谢求泉,柳志林
(江西工业工程职业技术学院 机械工程学院,江西 萍乡 337000)
0 引言
在微电子制造装备的高加速精密运动平台上,每个轴的加速度均达到10g,此时系统需要输出一个非常大的响应来提供加速度。通常我们为了实现高速高精度,常采用增大控制系统刚性的方法,但这样容易导致控制系统因刚性过大而产生振动,影响精密运动平台的快速定位动态响应和稳态整定性能,也会给系统带来时滞效应[1-3]。为了使控制系统在动态跟随过程中和进入稳态整定后有较高的位置跟随精度,有学者提出采用前馈控制来解决该问题。
1 前馈控制
前馈控制算法是一种开环控制,可以补偿指定的扰动量,也被称为扰动补偿控制。在实际应用中通常会根据扰动信号作用的大小和方向的变化提前采取一些适当的措施来对扰动偏差进行补偿;当系统出现扰动时,控制器就能根据测量所得的扰动信号给出相应调节,及时补偿被控对象因扰动所造成的波动。在提高系统响应和解决时滞问题时,前馈控制比反馈控制较为及时和有效,特别适用于控制系统需要迅速产生一个大加速度运动指令的情况,常用于工业上点到点运动的过程控制。
2 五阶S曲线速度规划
在满足动力学约束、轨迹几何特性和误差约束的情况下,运动规划可以确保运动平台在整个过程中快速、准确、平稳地到达目标位置。在控制学中常用的运动规划有T曲线速度规划和S曲线速度规划,如图1和图2所示。
对比图1和图2可知,在加速过程中,与T曲线速度规划相比,S曲线速度规划可以有效地避免加速度产生突变,从而大大地减小了运动过程中的冲击和震荡。所以在高速高精度系统中的加减速控制算法通常选用S 曲线速度规划。
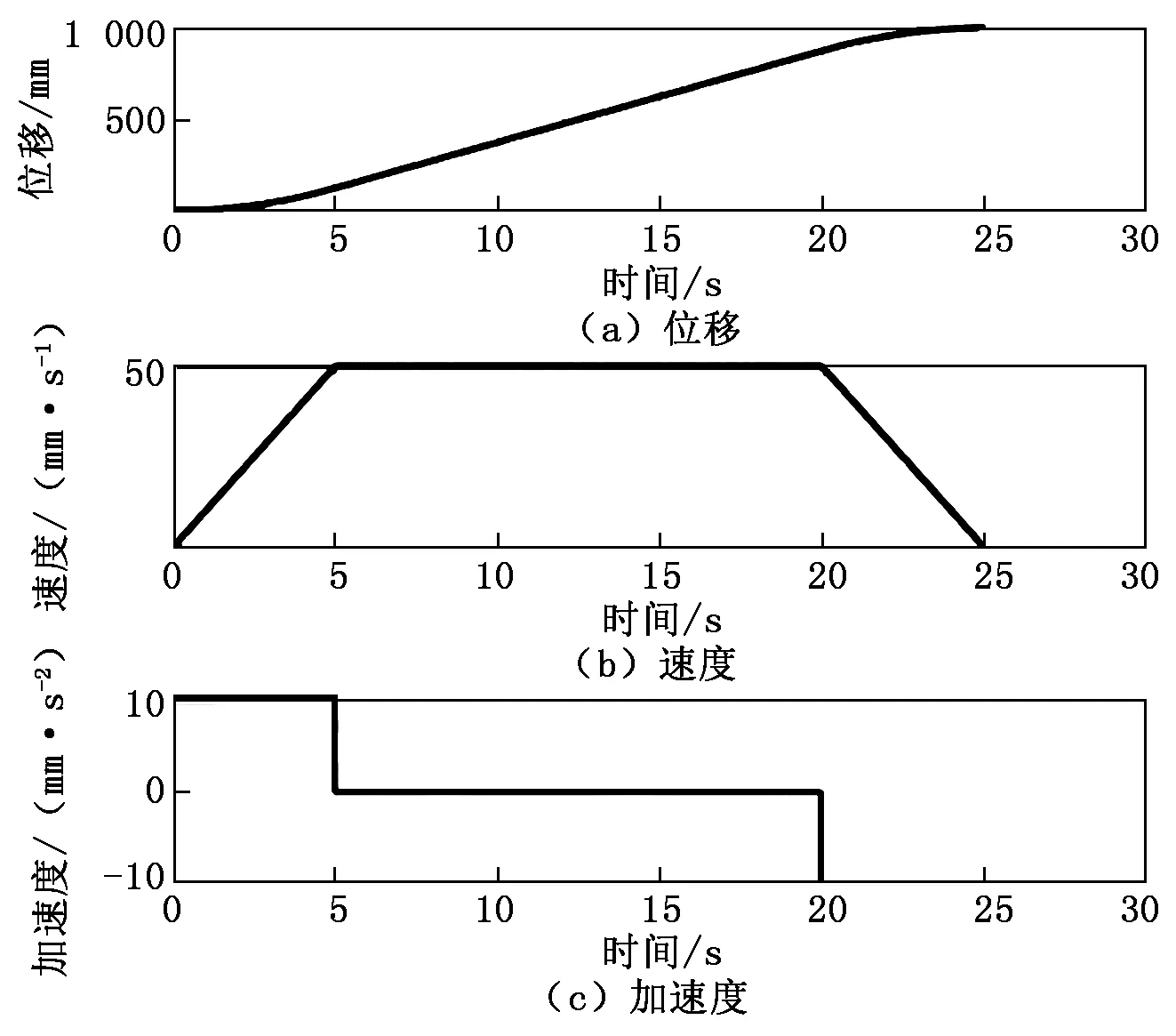
图1 T曲线速度规划
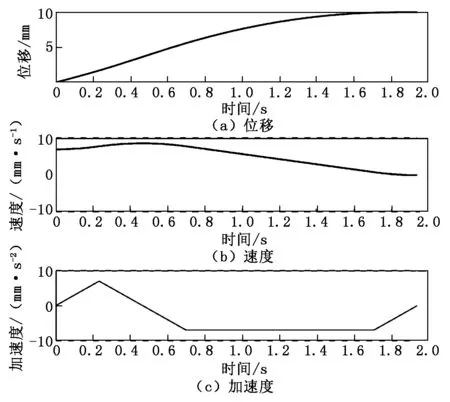
图2 S曲线速度规划
研究表明,S曲线速度规划的阶次越高,对系统产生的冲击和震荡会越小,但是其控制算法的运算规则会更加复杂。目前在高加速高精密运动系统中常采用五阶S曲线速度规划轨迹。五阶S曲线位移y(t)及其各阶导数的表达式如式(1)所示:
(1)

五阶S曲线速度规划如图3所示。
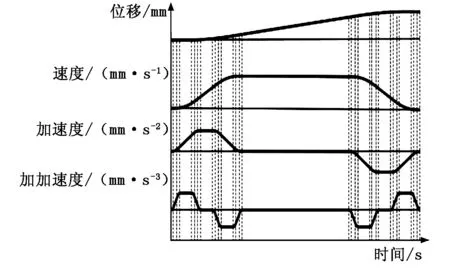
图3 五阶S曲线速度规划
由式(1)和图3可知,五阶S曲线速度规划在加速度突变时是光滑过渡的,意味着对系统产生的冲击和震荡将会更小。
3 前馈控制器设计
在闭环控制中,系统的动态跟随误差和稳态整定时间主要是由输入信号和系统响应造成的。而前馈控制可以加快系统的响应,有效地减小动态跟随误差和稳态整定时间。
前馈控制一般采用速度前馈和加速度前馈两种形式,由于高加速高精密运动系统要求瞬间提供一个高速高加速高精密的运动,传统的前馈控制方法难以满足要求,所以本文提出基于五阶S曲线速度规划的控制算法,引入加加速度前馈、加速度前馈和速度前馈,从而改善系统的运动性能,其控制器框架结构如图4所示。
图4中,Kvff为速度前馈增益,Kaff为加速度前馈增益,Kjff为加加速度前馈增益。
在高加速高精密运动平台上,使用图4所示的控制框架,并完成一个位移为2 mm、速度为850 mm/s、加速度为80 m/s2的点到点运动,对三个前馈增益进行调试,其数据如表1所示,运动过程中的动态跟随误差和稳态整定时间如图5所示。
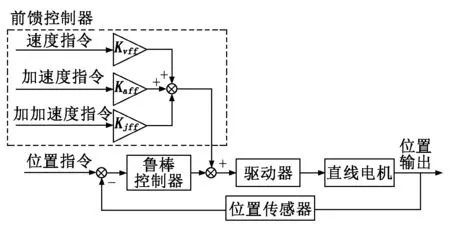
图4 前馈控制器框架结构

表1 运动过程中动态跟随性能和稳态整定性能
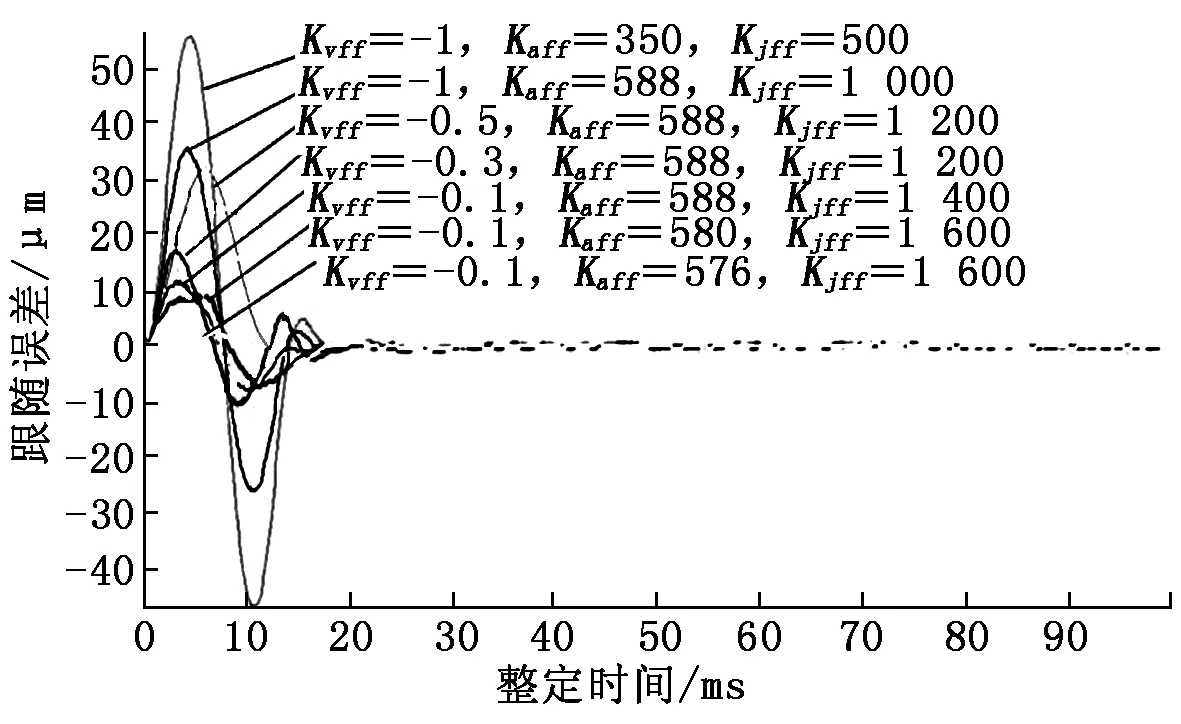
图5 运动过程中动态跟随性能和稳态整定性能
图6为速度前馈增益为-0.1、加速度前馈增益为576、加加速度前馈增益为1 600时,高加速高精密运动平台运动过程中的动态跟随误差和稳态整定时间。
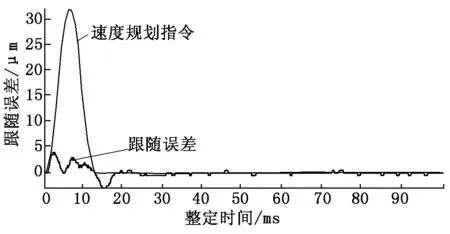
图6 Kvff=-0.1、Kaff=576、Kjff=1 600时高加速高精密运动平台的动态跟随误差
4 结论
本文通过对控制器输出指令进行五阶S曲线速度规划,并引入加加速度前馈增益,在其他条件不变的情况下对运动系统的运动参数进行微调,有效地解决了高加速精密运动平台快速定位的动态响应和稳态整定性能问题,提高了高加速精密运动平台的运动性能和质量。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年6期)2021-07-20
煤气与热力(2021年4期)2021-06-09
空间科学学报(2020年6期)2020-07-21
中华戏曲(2020年1期)2020-02-12
电子制作(2019年19期)2019-11-23
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年6期)2019-03-04