船舶导航网络通信技术分析
2022-06-26 12:51王孜倬
通信电源技术 2022年2期
王孜倬
(中海电信有限公司,上海 200090)
0 引 言
对于船舶而言,导航系统十分重要,不仅能够帮助船舶进一步明确行使方向,而且在海军舰船的研究中也有着一定的实际价值。随着海军舰船技术的不断发展,各舰船装备进行着大规模的改进和创新,以提高战斗力。舰船导航系统不仅要求提供准确的船位信息,而且要求与武器装备、测量系统相结合,提供武器发射的精确位置和落点测量等各种数据,是舰船航行和作战的重要保证。因此,当前船舶导航网络的研究重点已经成为了如何通过现代通信技术对多种信息进行综合处理和分析,旨在促进船舶导航系统的不断发展。
1 传统船舶导航系统网络通信技术分析
在传统的舰船导航系统中,各导航设备间普遍采用EIARS-422A接口通信标准,使用NMEA-0183码或二进制补码的形式进行通信。但是由于串行通信是逐位进行传送的,故传输速度较慢,在对该问题进行探讨的过程中,必须要做到明确传统船舶导航系统的实际功能与其应用价值,从而以此为基础,对传统的船舶导航系统进行优化和调整,使其功能更加完善,更能够满足人们对船舶的需求。首先,传统的船舶导航系统一般都是采取全双工的通信方式,通过平衡输出的发送器与差分输入的接收器实现船舶中的通信,这也是当前船舶通信的主要途径之一,同时船舶导航通信系统所采取的接口也有一定的标准。而针对通信架构,船舶系统中的信号线也有一定的要求,一般都是由两根信号输出线与两根信号输入线构成,这4根信号线也是保证船舶正常通信的前提,如果信号线出现损毁,则会影响船舶的通信状态。此外,为了进一步保障船舶的通信状态,使得船舶具有一定的通信能力,一般情况下,RS-422A线路不使用公共地线,这使得通信双方由于地电位不同而对通信线路产生的干扰减至最小。采用普通双绞线时,RS-422A可在1 200 m范围内以38.4 kb/s的波特率进行通信,在短距离(200 m)范围内可以轻易达到200 kb/s以上的波特率,因此这种接口电路被广泛地应用在舰船导航系统中。
使用传统的串行口进行通信不仅能够保证通信安全,对于船舶通信设备的要求也较低,同时能够实现较远距离中的通信要求,但是由于串行通信逐位进行传送,故传输速度较慢,并且它采用的是点对点的连接方式,当各导航设备间的连接关系复杂时,设备间的走线也就变得更为复杂。目前,随着舰船信息化程度的提高,各设备、各系统间的信息通信越来越频繁,信息量越来越大,使用传统单一的串行口进行通信已经不能满足导航系统发展的要求。
2 现代船舶导航系统网络通信技术分析
2.1 通信网络方案的确定
在船舶的通信网络上,使用RS-422A线路端口有一定的优势,能够进行较远距离的稳定通信,适合位置、信息相对独立的设备;而CAN总线通信则能够实现多端口的通信,使得船舶的通信方式更加多元化,不仅能够实现一对一通信、一对多通信,也能够进行全局通信。它所提供的非破坏性总线仲裁方式有效地解决了多节点同时发送报文时各报文相互冲突的问题,保障了CAN总线网络上信息传递的可靠性[1]。由于上通信技术己经相当成熟,因此组建的自由度很大,可以根据不同的船舶、不同的设备类型以及不同的协议要求对网络进行适当的组建。
2.2 通信网络的体系结构设计
通过上述分析,由于传统单一的通信方式存在着缺陷,又因为串口、CAN总线和以太网相结合的方式能方便有效地弥补上述的不足,因此确定了这种多元化的通信方案[2]。现代船舶导航系统通信网络体系结构如图1所示。
在这种新型的船舶通信网络架构中,不仅能够通过串口卡实现单口通信对接,还增加了CAN通信卡来实现CAN总线的通信。为了保证在局部故障或受损时全系统不至于瘫痪失效,CAN总线导航信息通信网络采用双环形冗余结构设计,但不能完全废除串行口通信,对于某些信息相对独立的设备,也可以保留原有的RS-422A通信。
2.3 系统组成
首先,应当明确船舶的导航系统是一个整体,通信网络是船舶导航系统中的一个较为重要的分支,这也就要求在进行导航系统的优化时,需要从整体的角度进行考虑,保证导航系统能够正常使用。即在对通信网络技术的架构进行改进的同时,也应当对导航系统的相关设备进行改进,使船舶导航系统的功能性得到保障[3]。例如,在将船舶的通信系统由串口改为CAN通信网络时,相应的导航设备与端口都需要进行更换,使其能够适应CAN通信网络的需求,这也是进行船舶导航系统优化时需要考虑的重要问题。在早些时间提出的方案中,提出在导航系统中增设一个转换器,将实现串口与CAN的相互转换,使得导航设备能够与通信网络相匹配,从而保障导航系统能够发挥其功能。但从系统的功能优化而言,这种优化方案并不应当作为首选,其在系统的改进上不够彻底,从而导致船舶的导航系统不能正常使用,影响导航系统的安全性能,具体原因如下。第一,转换器虽然能够使得船舶以串口端口接收CAN通信网络的信号,但并没有完全实现CAN通信网络的功能,造成船舶之间的通信网络依旧较为复杂,容易出现问题。而同时,这种方式也没有改变当前船舶通信网络单向连接的现状,没有实现船舶导航系统的信息共享,不利于船舶导航系统的进一步发展。第二,没有改变各导航系统之间信息不能互享的局面[2]。故本文也提出了具有一定可行性的船舶导航通信网络系统的构建方式,以此来保证船舶导航系统的实际应用性,具体如图2所示。

图2 船舶道行通信网络系统的构建
3 现代船舶导航系统网络通信技术研究要点
3.1 CAN总线接口电路设计
电路设计是CAN总线在现代船舶导航系统中得以应用的重要前提之一,也是进行船舶导航系统优化的前提。科学且完善的电路设计能够保障CAN总线接口在船舶导航网络中正常应用,而这同时也是船舶通信网络系统发展的重点与难点。由于CAN总线接口的复杂性,使得在应用了这一通信技术后,船舶的电路设计需要进行一定的调整。而在进行其电路设计时,首先需要明确其具体的组成。在CAN总线接口的电路设计中,必须要注重CAN控制器的功能与位置。
CAN控制器是以一块可编程芯片上逻辑电路的组合来完成实现这些功能,对外提供了与微处理器物理线路的接口,如图3所示,主要由总线控制器、微处理器、接口驱动器、高速光耦4部分构成,通过控制SJA1000实现数据的接收和发送等任务。例如,为了使得CAN总线接口中的各个节点都能够正常应用,增强其实用性,一般都是由高速光耦器对相关信息进行处理和分析,从而保证节点的抗干扰能力[3]。CAN总线接口的电路设计对于导航系统有着较为重要的意义,在其架构建设中,也需要相关人员根据船舶的实际情况进行调整和分析[4]。

图3 CAN总线接口电路设计
3.2 以太网通信接口电路设计
为了实现采用以太网卡通信的导航设备将数据信息接入通信网络并传输到综导台,需要为以太网卡设计通信接口电路。出于简化电路设计和降低成本考虑,这里选用RTL8019AS以太网通信接口芯片,电路设计如图4所示。在进行电路设计时,采用10BASE-T布线标准通过双绞线进行以太网通信,而RTL8019AS内置10BASE-T收发器,所以网络接口电路比较简单,外接一个隔离滤波器,TPIN为接收线,TPOUT为发送线,经隔离后分别与RJ-45接口的RX、TX、RJ-45端相连。时钟电路通过T1、T2接一个20 MHz晶振以及两个电容,实现全双工通信。
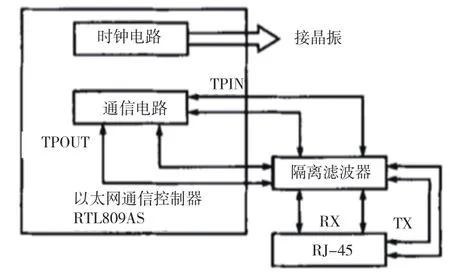
图4 以太网接口电路示意图
3.3 通信网络的可靠性设计
在分析船舶导航系统的通信网络技术中,同样不能忽略通信网络的可靠性。具有一定可靠性设计的通信网络,在船舶的实际应用中出现问题的可能性较小,可以较好地满足船舶导航系统的需求,实现船舶的安全行驶。而在本文中,也通过了一定的设计来增强通信网络系统的可靠性,从而保证船舶的安全性能。首先,采取了两套完全相同的总线拓扑结构,使用两台计算机(监控计算机A和监控计算机B)来监控两个网络(A路和B路)。它们的配置方式完全相同,都通过CAN接口与CAN网络A和CAN网络B相连,实时监测各导航设备和两条网络的工作状态,大大降低了出现问题的可能性。其次,在船舶CAN总线通信系统的架构中也进行了一定的调整,为了充分保障CAN总线中的各个节点能够正常进行工作,在各个节点中都进行了一定的冗余设计,防止节点出现问题,影响CAN总线通信系统的正常运转。同时,在CAN总线通信系统进行工作时,相关人员也能够对其进行调整,以此来保障导航系统的可靠性[5]。
4 结 论
在对船舶导航系统通信网络进行分析时,首先需要考虑到当前的技术发展问题,使得所提出的通信网络技术具有可行性,这也是进行船舶通信网络架构的重要前提。而在综合考虑了技术层面上的问题后,则也需要考虑到船舶通信的实际需求,分析传统的船舶通信方式中存在的不足,并据此进行通信系统的优化,使得所提出的新型船舶通信方式具有实际价值与可行性。而传统的船舶通信中,所存在的最大问题即为单口通信带来的不便,故本文中着重分析了CAN总线网络与以太网技术在船舶网络通信中应用的可行性,并提出了综合性的通信网络构建方式,对于船舶导航系统的发展与完善具有一定的实用性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
电子制作(2019年22期)2020-01-14
电子制作(2019年13期)2020-01-14
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
电子制作(2017年24期)2017-02-02
舰船科学技术(2016年1期)2016-02-27