
基于多自由度检测末端的室内无轨式电力巡检机器人研究
2022-06-27 08:29陈辉,聂铭
制造业自动化 2022年3期
陈 辉,聂 铭
(1.广东电科院能源技术有限责任公司,广州 510000;2.广东电网有限责任公司电力科学研究院,广州 510000)
0 引言
随着科学技术的进步,电力巡检工作被赋予更重要的角色担当,作为室内巡检机器人,要完成巡检配电站室内设备的正常运作的任务,不仅需要具有创建环境图、计划巡检路线和精确定位的能力,还要以创新出具有替代配电站巡检人员执行电力设备检测任务的新能力。
本文基于电力配电站室内运行的无轨巡检机器人为背景,设计了机器人的多自由度机械臂和关节控制模块,采用PID模糊控制技术对多自由机械臂关节电机控制,以达到运动的效果,实现了在复杂环境下室内巡检机器人运用机械臂进行检测目的。
1 多自由度关节的模糊PID控制设计
电力巡检机器人的多自由度关节机械臂驱动核心是直流无刷电机的控制。鉴于直流无刷电动机可以运行在复杂环境中的特点,本文采用模糊PID控制技术有效地提升了直流无刷电动机的运作效率。在运行环境下,对于配电站室内众多电气设备的末端检测问题。首先,结合模糊控制原理进行了系统设计工作,给出被控对象的传导函数。其次,运用模糊控制原理,本文构造模糊PID逻辑控制器,以自动求解PID参数值。最后,通过定位传感器采样测量无刷直流电动机传导精度,并使用MATLAB仿真并分析转速曲线。
1.1 直流无刷电机模型
在机器人机械臂的应用中,采用无刷直流电动机控制机械臂的运动可以获得很好的传导速度与动作精度。无刷直流电动机的韧性强,耐磨性好,承载力大等优点有利于产品细节的开发,并且运作动作中的振动小,自身噪音低等特点也适合高精度机器人的选配。随着社会的进步和科学技术的发展,它的性能正趋于更加完善。
本文基于对直流无刷电机控制的深入研究,运用PID模糊控制技术和电机单项绕组部分结构,构建绕组感应电势与相电压确定电机定子电压的平衡公式:
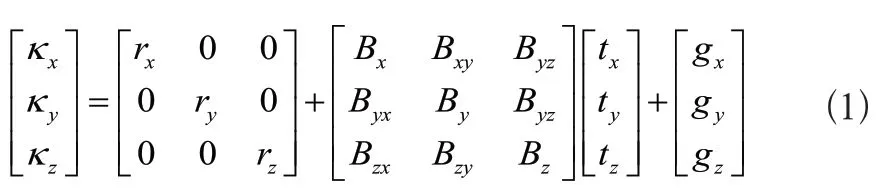
式(1)中,κx表示各项定子电压;rx表示各项绕组定子电阻;Bxy表示各项绕组电子互感;tx表示定子电流;gx表示定子反向动势;
模型设计中,设定三相绕组之间没有互感影响,等效电路如图1所示。

图1 等效电路
根据图1等效电路中的κi值控制无刷直流电动机。因传统的脉冲宽度调制方式在应用中对电压值的调整本质上是离散的跳跃序列,将导致大大降低电机寿命,并降低机器人运行过程的稳定性。因此,需要对执行控制方式采用平滑处理改造巡检机器人机械臂控制精度。
1.2 电机的模糊PID控制

传统PID控制数学模型如式(2)所示:式(2)中,ε(n)表示基于n次的采样偏差值;n*f表示比例项值;n*i表示积分项值;nc表示微分项值。
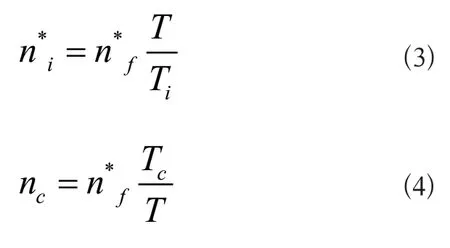
式(3)、式(4)中,T表示控制周期。
图2中,L表示系统设置的精确数量;J和S代表系统偏差和偏差率;a和e代表模糊计算偏差和偏差率;表示通过模糊计算获得的a和e的控制效果;U代表正确对进行模糊判决后得到输出的精确量。

图2 模糊控制结构框图
1.3 机械臂关节控制系统
机器人机械臂控制结构如图3所示。
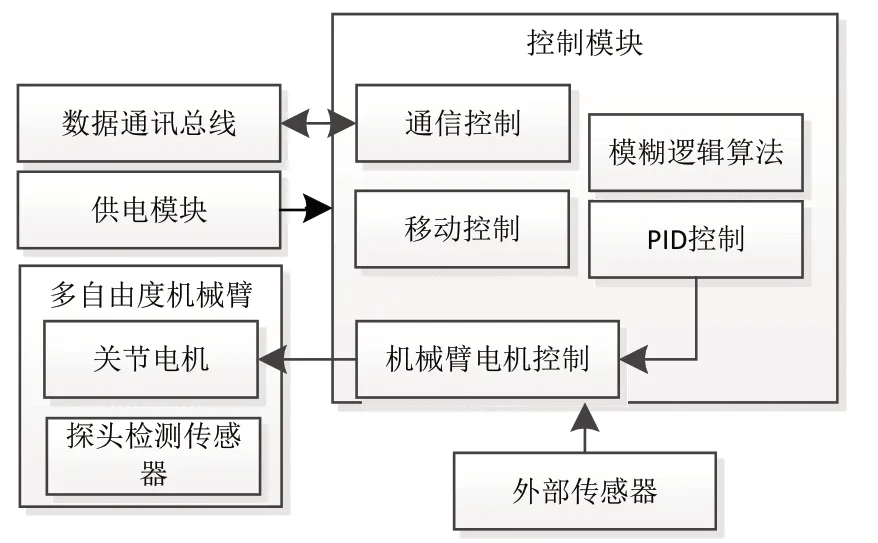
图3 机器人机械臂控制结构
供电模块为各关节电机和传感器提供恒定电压;数据通讯总线为整个系统提供数据传递的支撑服务,本文采用并行数据总线以实现多数据流交汇的信号传输,对多关节同步协调做出了保证,也可确保高电磁干扰环境下机器人系统的工作正常;外部传感器属于机器人路径控制部件,也可用于机械臂的定位及校准工作;控制模块中根据模糊逻辑实现的PID控制对自由臂各关节电机进行操作,利用末端探头对配电室内设备进行检测。机器人现场工作状况如图4所示。
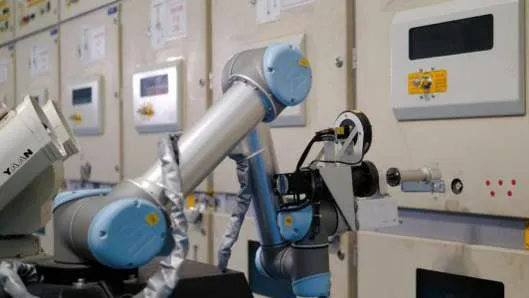
图4 室内无轨电动巡检机器人工作图
2 自由度关节运动学转矩分析
利用安装的电机驱动轴承和齿轮,多自由度机械臂带动作用臂运动。针对配电室电气设备复杂环境,利用多级电机驱动的自由臂完成多自由度的关节运动操作。机械臂关节结构分析如图5所示。

图5 多自由度关节结构
图5中,G1、G2是两个直流电机,J1、J2是两个行星减速器,C1、C2、C5是等径锥齿轮,C3、C4是准双曲面齿轮。
该机构的运动关系如下式所示:

式(5)中,ωi表示转动角度范围;σi表示俯仰角度范围的角度、ωi表示角速度和角加速度;准双曲面齿轮的ωj表示角度、σj表示角速度和ωj表示角加速度。
减速器设定参数如表1所示。
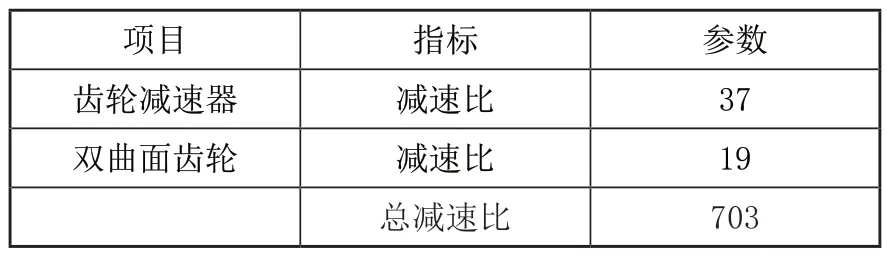
表1 减速器参数设定
根据关节移动角度与电机输出角和关节之间的关系,输出角速度与电机输出角速度之间的关系:

式(6)中:m1、m2分别是电机的输出角度;
3 巡检机器人多自由度机械臂实验分析
3.1 实验环境
仿真测试采用SolidWorks软件机械运动进行仿真实验。仿真平台配置如表2所示。
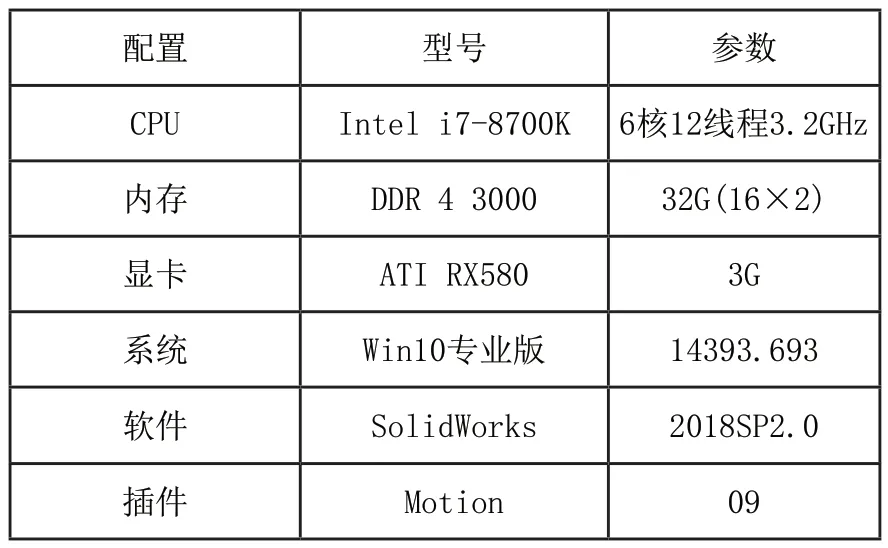
表2 仿真实验平台配置
Solid Works的仿真测试可以针对复杂条件进行设置,运用Motion插件实现机械结构的完整运动轨迹与力学的仿真。实验过程中记录的数据可以实时反映出系统运转状态机运动曲线轨迹,并且可以与图表和动画配合使用,曲线和可视化数据可以显示出机器人各部分的特定运动姿态,为机器人整体运作调整提供技术支持。
在创建装配体的过程中,SolidWorks将自动设置的拟合关系转换为其相应的条件约束关系,因此与其他软件相比,该软件相对简单高效。只需要在巡检机器人的运动机构上添加适当的耦合关系和驱动力即可进行仿真。在定义运动辅助机构时,必须确保自由度为0。如果机制中的自由度小于0,那么软件将自动确定存在冗余约束,并且其内置的ADAMS解决方案会将其自由度强制为零,因为在归零过程中,它将强制删除一些多余的约束,这些约束与最初想要产生的效果不匹配,并且失去了仿真的意义。自由度的公式是:

式(7)中,φ表示自由臂关节数量,η表示约束数,λ表示电机驱动量。
通过添加机器人的耦合关系并根据传动比设置驱动关系,并结合机器人的运动规律和运动学方程,进行COSMOS Motion仿真,并在SolidWorks软件中进行了运动计算模型的仿真实验。主要的仿真内容是:
1)巡检机器人静态下的自由臂各自由角度的运动行程;
2)巡检机器人在移动中及非水平面下的自由臂各自由角度的运动行程。
3.2 实验过程
1)机器人的初始位置为(0,0),让机器人分别沿2cm×2cm的矩形路径和半径2cm的圆形路径移动,并使用手动控制定位进行比较和参考,并得出最佳控制参数K=0.9。
图6可以看出,修剪机器人定位步行误差最大出现在模拟范围的周边位置,并且步行精度呈现缩小的趋势。与人工定位相比,PID模糊控制自由臂的中心定位步行点要高于人工定位。机械臂的跟踪误差逐渐在中心点收敛并趋向于更小的误差。
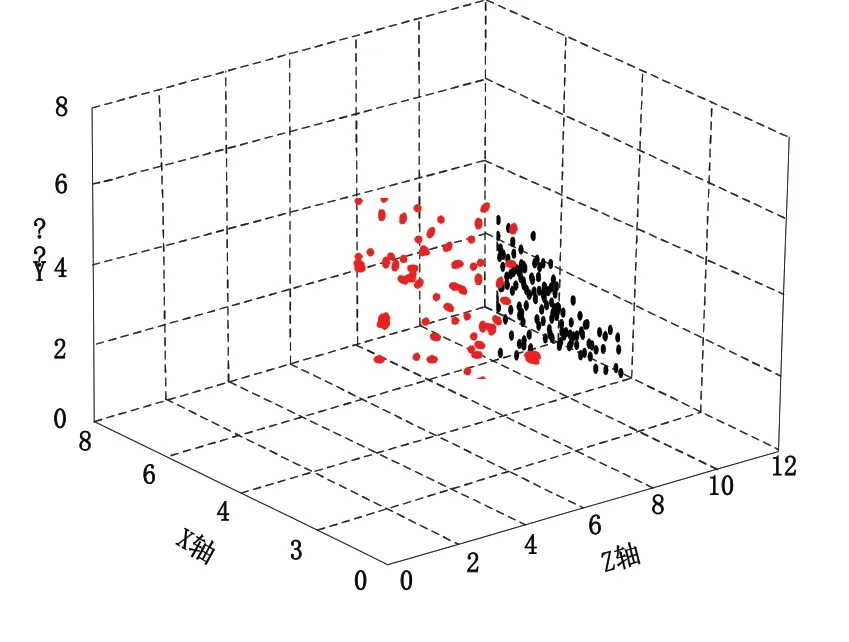
图6 多自由机械臂模拟定位分布对比
2)对多次迭代循环机械臂的运动轨迹进行测试,验证控制算法的精度控制误差范围,如图4所示。
图7中,在多次迭代过程中,时间段内的自由形成轨迹分布基本控制在0.2毫米范围内,算法的模糊效果控制是在细分之外的精度进行校正,而脉冲运动与控制逻辑设计基本吻合,故满足精确量的控制要求。

图7 迭代测试运动控制逻辑精度
4 结语
基于模糊PID控制设计的电力巡检机器人,通过多角度自由臂的操作可实现配电室内电气设备的末端检测工作。经过仿真实验与分析,在复杂环境条件下,对自由臂的运动效果高于人工手动定位,表明本文研究成果具有良好的未来发展前景。在后续的工作中,主要对电机脉冲运动逻辑的参量精准调校为工作重点,进一步优化模糊控制算法,实现机械臂关节响应时间及定位准度的更高阶目标。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
成都信息工程大学学报(2021年6期)2021-02-12
当代工人(2020年8期)2020-05-25
电子制作(2019年16期)2019-09-27
小溪流(画刊)(2017年12期)2018-01-10
电子制作(2016年21期)2016-05-17
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
