自感型功能结构研究前沿与展望
2022-07-04 03:51冯毅雄李普衍邱皓曾思远谭建荣
包装工程 2022年12期
冯毅雄,李普衍,邱皓,曾思远,谭建荣
【专题:智能制造时代的设计理论、方法与技术】
自感型功能结构研究前沿与展望
冯毅雄1,2,李普衍1,2,邱皓1,2,曾思远1,2,谭建荣1,2
(1.浙江大学 a.流体动力与机电系统国家重点实验室 b.设计工程及数字孪生浙江省工程研究中心,杭州 310027;2. 湖州绿色智能制造产业技术研究院,浙江 湖州 313000)
对自感型功能结构的研究进展进行归纳和分析,并对其发展前景进行展望。定义自感型功能结构的概念,分析自感型功能结构的设计流程,揭示自感型功能结构的内涵,并从敏感材料、制造方法、响应激励3个视角对自感型功能结构设计的研究进展进行分类,证明其可以通过元胞性能设计、基元构型制造和序构综合调控的设计方法进行制备并应用于实际场景中,实现结构—功能的一体化。归纳了自感型功能结构的设计与制造研究进展,总结了自感型功能结构的重点技术和在不同领域的突出性成果,结合自感型功能结构的概念内涵,对其在机械、材料、生物等领域的应用进行了展望。自感型功能结构可以对本体和环境的变化进行感知,按照设计好的特定方式发生功能或性能的变化,具有结构构型高效、感知对象多样、感知元件集成等特点,在相关领域中具有广阔的应用前景。
功能结构;环境感知;传感器;设计方法;先进制造技术
自感型功能结构是一种依据预设意图在产品微宏观结构上同时实现形态或性能演变的结构—功能一体化结构与具备感知能力的可设计智能结构。在传统意义上,功能结构具有比应变大、比强度高等优点,可以同时满足高刚度、高强度和高稳定性等极端服役性能需求。随着软体机器人和柔性电子领域的发展,对功能结构提出了对环境激励及本体激励具备自我感知能力的需求。具备自感知本体及环境变化能力的功能结构应运而生,其具有结构高效化、重量轻质化、感知集成化的独特优势,在健康监测[1-3]、植入式医疗[4-5]、机器人感知[6-7]等领域具有潜在的应用前景。本文对自感型功能结构设计与制造的研究进展进行了综述,并对其应用前景提出展望。
1 自感型功能结构的定义与内涵
1.1 自感型功能结构的定义
功能结构首次出现在20世纪70年代,美国哈佛大学Simon教授利用功能结构设计了静脉腔除栓器。随着设计理念、新型材料和制造技术的进步,功能结构由整体化功能拼接、一体化功构互融向智能化结构自感知方向发展。自感型功能结构指在材料或结构上创新从而对结构本体及外界环境变化感知并做出响应的功能—结构一体化的可设计智能结构,其研究主要集中在2个方面:一方面是制备新材料应用的自感型功能结构,如炭黑[8-10]、碳纳米管[11-12]、石墨烯[13-15]、MXenes[16-17]和纳米线[18]等纳米导电材料,氧化锌[19-20]、氮化镓[21]和压电陶瓷[22-23]等压电材料;另一方面是在现有材料上研发新构型的自感型功能结构,如花粉状层级结构[24],TPE基碳纳米管3D网络结构[25],蛛网启发的裂纹结构[26]等微结构。
1.2 自感型功能结构的设计流程
对于自感型功能结构,其分类与设计制造流程见图1。无论是制备新材料应用的智能结构还是在现有材料上研发新构型的自感型功能结构,其设计流程都具备如下4个步骤[27-28]。
1)自感型功能结构的材料组分设计。根据设计经验或是创新性的发现选择实现感知的敏感材料和基底材料组分,根据材料组分配比与感应元胞的映射关联机理,有效利用不同材料间相互作用规律,使材料的选择和分配满足结构的功能需求。
2)自感型功能结构的元胞性能设计。自感型功能结构的元胞是通过具有响应功能材料制备,能实现自感知性能特性的最小单元。元胞性能设计以材料本构模型为中心,对单一敏感材料和基底材料建立材料特征模型,侧重于表达单一材料或经典组分功能结构对激励的响应信息。有效表征外界激励或本体激励下自感型功能结构的元胞性能,使自感型功能结构的元胞变形模式能很好地用计算机加以形式化表达。
3)自感型功能结构的基元构型制造。自感型功能结构的基元是由若干元胞按照功能需求定向排布组成的能实现简单功能的功能—结构一体化智能结构。根据问题建模与计算求解方法,在设计过程中辅助设计者建立整体功能模型,通过设计方法对感应元胞进行组合布局,揭示功能基元宏观性能与变形元胞微观结构间的构效关系,采取和材料、基元构型匹配的制造方法加以制备。
4)自感型功能结构的序构综合调控。自感型功能结构的序构是由若干基元组合而成,其对本体和环境激励的感应与响应具有次序,能实现复杂的功能。设计人员根据设计经验,依据性能需求选择功能基元响应的时间序列,功能基元按照一定的规律相互嵌套排列形成满足性能的自感型功能结构。根据基元构型设计区域与响应感知性能的时空分布和构造机理,通过功能基元最优布局和时间序列最优构型约束,对序构进行综合调控,实现自感型功能结构的空间序构调控。

图1 自感型功能结构的分类与设计制造流程
1.3 自感型功能结构的内涵
自感型功能结构涉及机械、材料、力学、电子、生物和计算机等多学科领域,各个领域之间并不是独立的堆积,而是有机融合协调。自感型功能结构的敏感材料在温度、压力、磁场等外界激励或是拉伸、弯曲、扭转等本体激励下,产生的物理、化学信号响应和变化需要被合理地采集、处理并分析。这就要求在设计过程中解决其中不同学科的难点,实现对自感型功能结构有针对性及可预测性的响应,统筹规划其设计过程。其主要需要解决3个科学问题。
1)自感型功能结构的元胞性能空间分布和构造机理:描述、深化与应用的过程,研究自感型功能结构感知元胞的获取、建模与演化,实现基于变胞演变的计算机辅助自感型功能结构创新设计。
2)自感型功能结构功能基元制造:功能基元能够实现自感型功能结构的基础功能,实现功能基元的制造也就具备了复杂自感型功能结构制造的基础。需要明晰变形元胞几何构型的起源及其关键功能基元,通过先进制造技术制造功能基元。
3)自感知功能基元序构调控:应用飞速发展的大数据、智能材料技术和人工智能技术,实现可设计的自感型功能结构的性能仿真,在时间序列上确定功能基元综合与单独应用时的响应,并实时监测自感型功能结构的感知和响应状态。
2 自感型功能结构的元胞性能设计
2.1 自感型功能结构元胞的分类
自感型功能结构由于其在柔性驱动器、可穿戴设备、疾病监测预防等领域的潜在应用,因此得到了广泛的研究[29]。自感型功能结构的最小组成单位为元胞,现有的研究包含了不同的元胞种类,可以分为3种主要类型[30-31]。
1)基于压电材料的自感型功能结构元胞,利用了压电材料的压电效应。在受到外界压力时,材料内部会产生电荷。通过采集、分析电信号,实现元胞的自感知功能。
2)基于电容材料的自感型功能结构元胞,利用了柔性电极间的电容效应。柔性电极通常被涂覆在弹性体电介质的两面,当弹性体受到形变激励时,柔性电极间的间距发生变化,从而改变电容。通过电容变化,采集、分析电信号实现结构的自感知功能。
3)基于液态金属材料的自感型功能结构元胞,利用液态金属材料的压阻效应来感知元胞的变形。这类液体材料通常被封装在微流道中,当微流道发生拉伸、弯曲等形变时,迫使内部不可压缩的导电液体发生变形,从而产生电阻变化。通过电阻变化,采集、分析电信号实现结构的自感知功能。
2.2 压电材料的自感型功能结构元胞
第1种类型的自感型功能结构元胞使用压电材料作为敏感材料,实现元胞的自感知。常见的压电材料如氧化锌(ZnO)[19-20]、氮化镓(GaN)[21]、压电陶瓷[22-23]等,具有大压电常数,宽线性范围,较高固有频率,高电阻率和大介电常数等性能[32]。
Liao等[33]设计了一种基于纳米发电机的自感型功能结构元胞,元胞的纳米发电机利用ZnO制成的压电细线作为敏感元件,在其外侧布置了嵌入铜线的PDMS层,用于传递应变,在其内侧布置了铟锡合金层和铜电极,用于固定压电细线的位置并传递电荷信号,由此实现元胞的自感知功能,见图2。
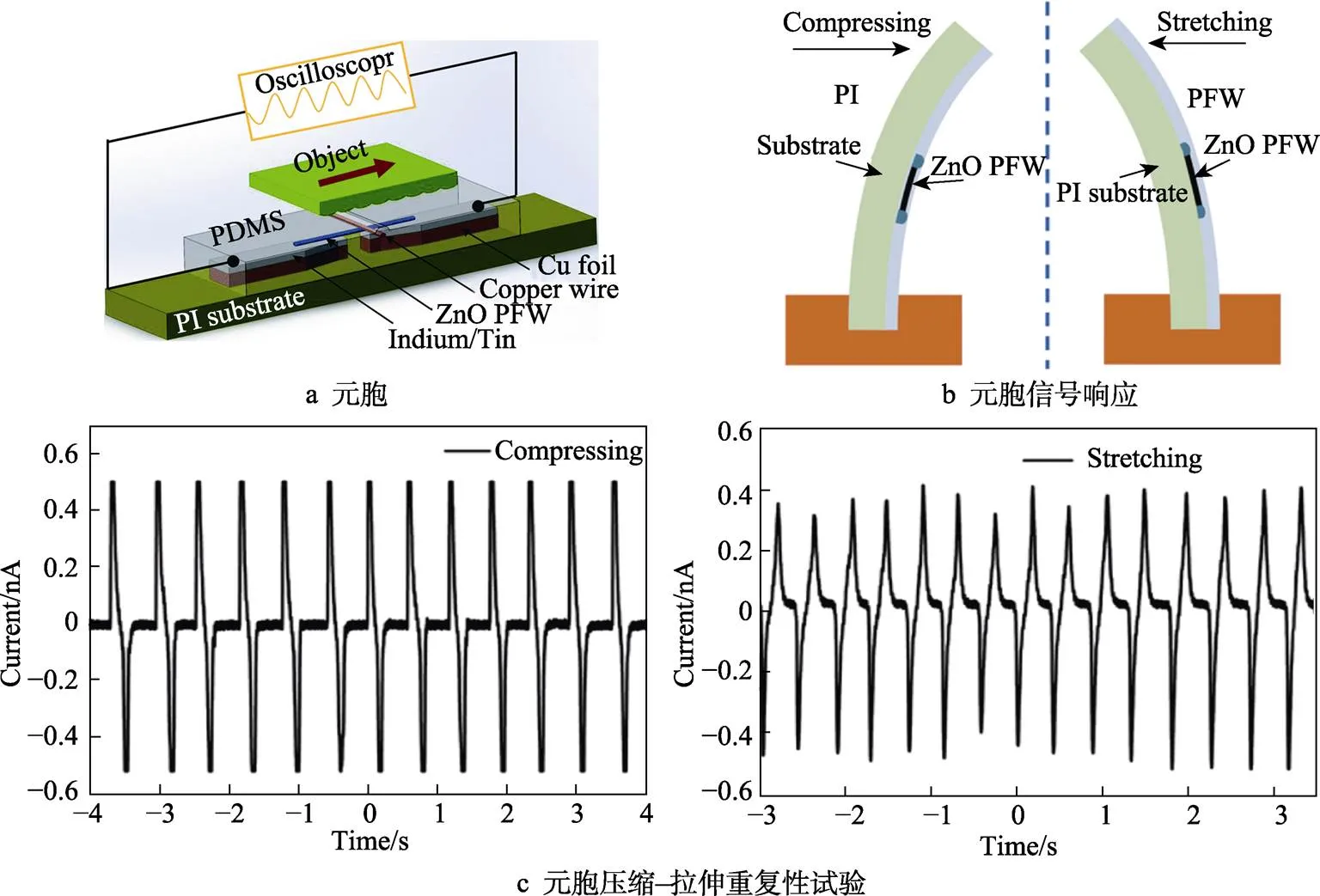
图2 基于纳米发电机的元胞设计
此外,通过将亲水性羧甲基纤维素(CMC)悬浮液和石墨烯(G)纳米颗粒混合得到的水性碳基导电油墨,也被证明可用于压电式的元胞设计中[34-35]。Sinar等[35]以石墨纳米颗粒和G–CMC作为导电材料,外部覆以高分子材料,使用叉指电极刻印,将ZnO和PDMS复合物作为压电材料涂在G–CMC基底表面。该元胞设计具有良好的低频和高频性能,且材料对环境的污染较小。
此外,感知元胞设计还可通过集成非常规压电材料的材料,使其具有基于压电特性的自感知功能,这一创新突破了原有的压电材料限制。Wu等[36]设计了一种基于柔性集成电磁器件的自感型功能结构元胞。元胞的柔性集成电磁器件包括2部分,一部分是由钕铁硼粉末、TPU粉末和气相二氧化硅均匀混合,打印得到的多孔结构;另一部分是由不锈钢粉打印得到的双层板螺旋夹芯结构。TPU基底的多孔结构具有弹性,因此柔性集成电磁器件可以很容易地压缩然后迅速恢复。在外力驱动的压缩–恢复循环中,不锈钢粉末制成的螺旋结构中磁通量会产生相应的变化,从而根据电磁感应原理在双板上产生电势差。通过测试得到压力–应变曲线和应变–电势差曲线并对信号加以处理和分析,可实现元胞的自感知,见图3。
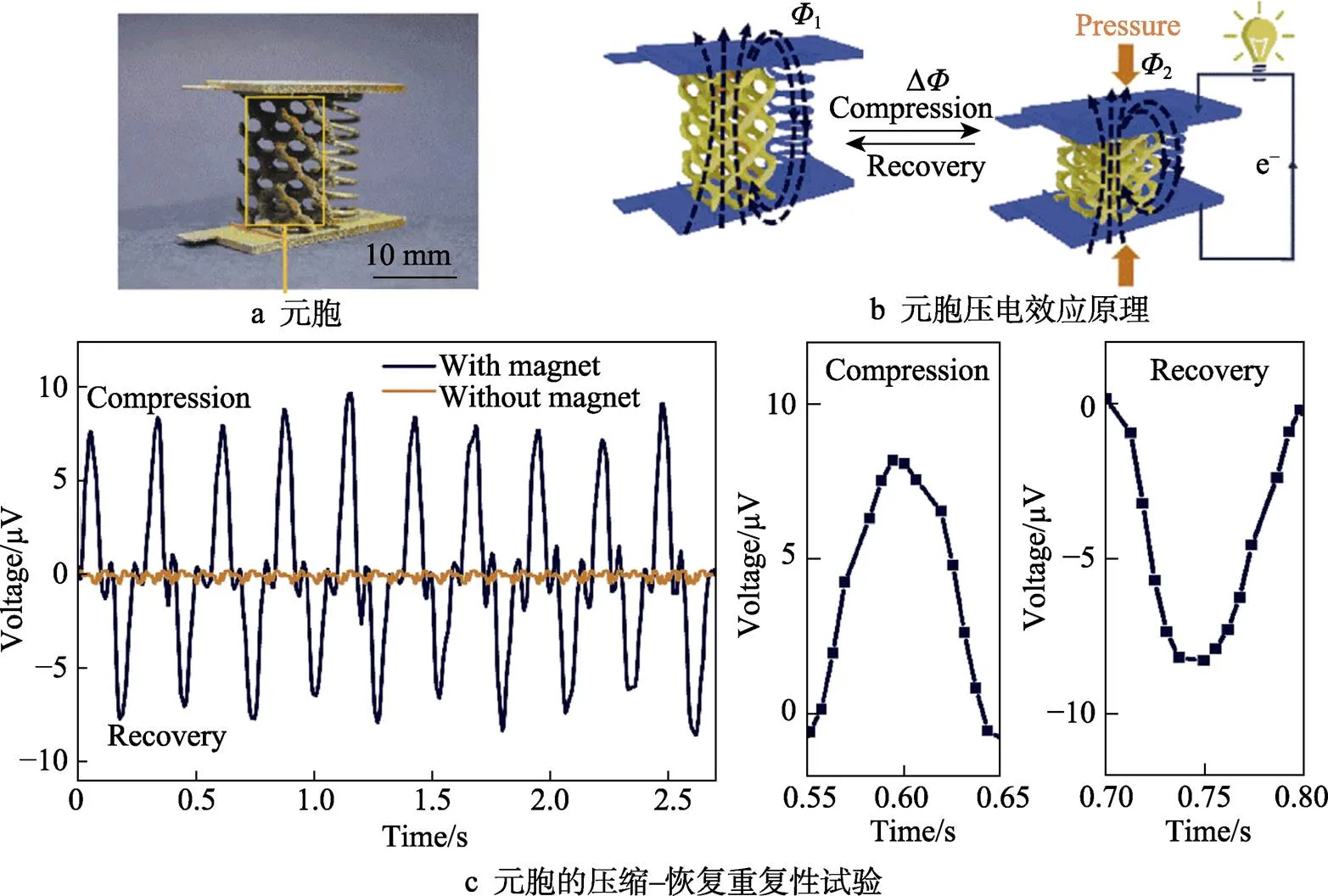
图3 基于柔性集成电磁器件的元胞设计
2.3 电容材料的自感型功能结构元胞
第2种类型的自感型功能结构元胞使用电容材料作为敏感材料,实现元胞的自感知。用于实现感知功能的电容材料多为导电材料制成的聚合物,导电材料包括石墨烯[13-15],炭黑[8-10],纳米线[18],碳纳米管[11-12]等,聚合物基底包括硅基聚合物,乙烯基聚合物等。
Sharma等[37]设计了一种以混合离子纳米纤维膜为敏感元件的自感型功能结构元胞。设计的元胞以具有金涂层的PDMS作为电极层,将混合离子纳米纤维膜夹在两层电极层之间,形成夹芯结构。元胞的混合离子纳米纤维膜由PVA、LS和MXene纳米片3种材料合成,其中MXene表面的功能层通过氢键捕获离子,能降低元胞电极层的初始电容。当PDMS受到了外界压力刺激时,膜内粒子因受到迅速增加的场强而移动,使得电极层的电容产生显著变化,能在较宽的线性范围(0~30 kPa)内表现出很高的灵敏度(5.5 kPa–1),见图4。
Zhang等[38]设计了一种基于碳润滑脂的自感型功能结构元胞。碳润滑脂是一种将碳纳米颗粒溶解于有机溶剂中制成的高粘度液体。设计的元胞利用碳润滑脂作为柔性电极,将其涂抹在具有中空腔室的硅橡胶(Ecoflex 30)结构外表面,并在柔性电极外侧再涂覆一层硅橡胶保护层。所设计的功能结构元胞具有较高的灵敏度和良好的线性范围,见图5a—5b。Wang等[39]设计了一种基于碳纤维聚合物的自感型功能结构元胞。这一复合材料层的制备主要步骤包括将35 wt%的碳纤维粉末添加到未固化的聚二甲基硅氧烷中,并在砂纸上固化成型。将复合材料层作为电极层,中间填充纯的PDMS作为夹芯,测量并分析压力刺激时电极层间的电容变化,由此实现元胞的压力感知,见图5c—5d。
此外,还有一种基于纺织物的电容材料,这种材料通过编织、刺绣技术将导电纱线嵌入织物结构中制备。应用这一电容材料的自感型功能结构元胞具有灵敏度高,鲁棒性好的优点。Atalay等[40]设计了一种基于导电纺织物的自感型功能结构元胞,将导电纺织物(Shieldex M–130)粘附在硅胶电介质层(Ecoflex 30)的两面,构建电极层。在受到外力拉伸时,电介质层横截面积缩小,带动导电纺织物制成的电极层间距缩短,电容发生改变,从而实现元胞的自感知功能,见图6。
图4 基于混合离子纳米纤维膜的元胞设计
Fig.4 Cell design based on mixed ion nanofiber membrane
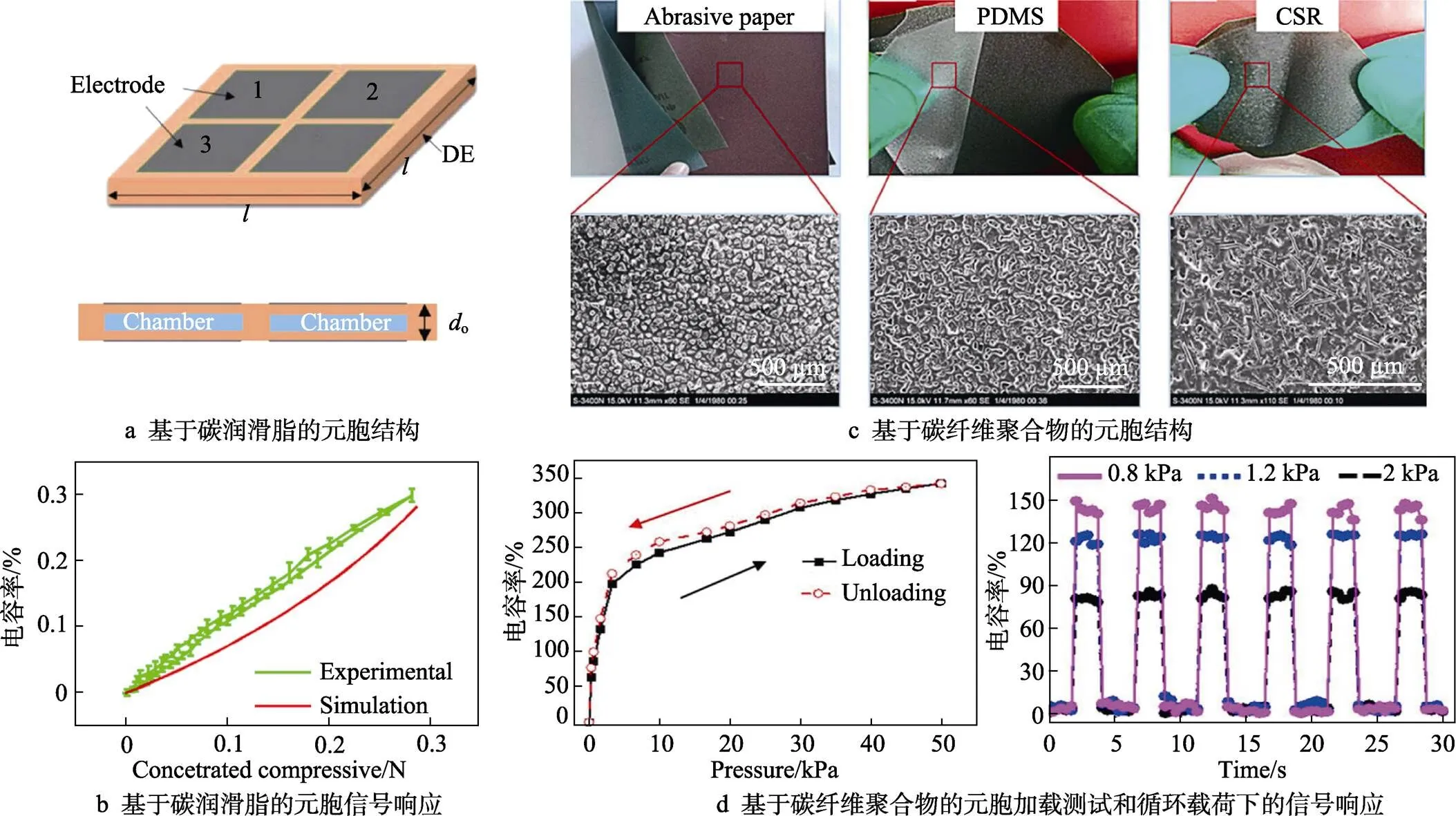
图5 基于导电聚合物的元胞设计

图6 基于导电纺织物的元胞设计
2.4 液态金属材料的自感型功能结构元胞
第3种类型的自感型功能结构元胞使用液态金属作为敏感材料,实现元胞的自感知。用于实现感知功能的液态金属主要是镓基合金,包括镓铟合金和镓铟锡合金等[41]。
镓基合金在室温下或室温附近呈现出液态,是熔点较低的金属材料,具有高导热性、高导电性、低粘度和优越的流动性。由于大块的液态金属受其表面张力的影响而不易利用,通常将其封装在微流道中或是用打印技术打印在柔性基底上[42-44]。当微流道发生拉伸、弯曲等形变时,迫使内部不可压缩的导电液体发生变形,其长度和横截面改变。由于其满足欧姆定律,其电阻变化和拉伸、弯曲应变存在映射关系[45]。Kim等[46]设计了一种能进行低压检测的自感型功能结构元胞。该元胞利用三元镓基合金Galinstan作为敏感材料,将其注入失蜡制造技术所制造的弹性体微流道中,并在微流道上方通过熔融沉积成型技术集成了刚性的微凸点阵列。该元胞设计能够感知外界对其施加的压力,且具有极低的检测极限(≈16 Pa)和在低压范围内的灵敏度。在循环压力的加载下,信号表现出良好的重复性和稳定性,见图7。
Sun等[47]设计了一种能检测力输入幅值和方向的自感型功能结构元胞。该元胞利用镓铟合金eGaln作为敏感材料,用液态金属打印机将eGaln图案打印在塑料薄膜上,通过低温使液态金属固化,然后转移到硅橡胶基底上并封装。其中eGaln微流道图案被设计为均匀的三等份,用于检测外界力激励的幅度和方向。同时,这种元胞的微流道结构设计放大了信号响应,从而提高了元胞的感知灵敏度,见图8。
Tapia等[48]设计了一种能感知柔性表面变形的自感型功能结构元胞。该元胞利用共晶镓铟作为敏感材料,将液态的共晶镓铟和未固化的硅酮混合,加压注射在弹性体表面的微流道中,并等待其固化。以该元胞为最小单元,在仿真中初始生成元胞的分布集合,然后通过多目标优化选择合适的元胞子集。这种元胞构成的子集能感知弹性体表面诸如弯曲、按压导致的变形并进行三维重建,从而实现功能结构的自感知功能,见图9。

图7 低压范围自感知的元胞设计
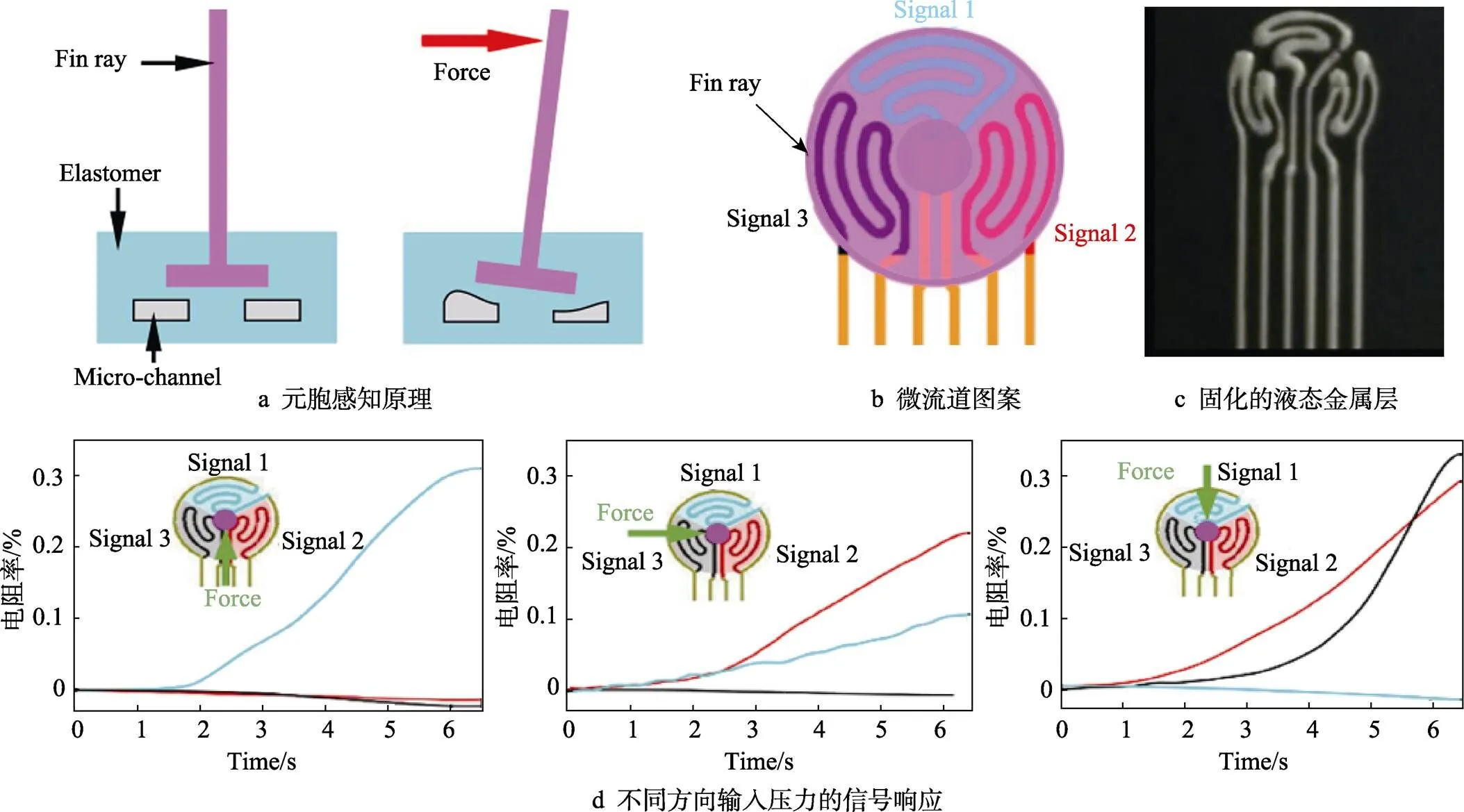
图8 输入力幅值与方向自感知的元胞设计
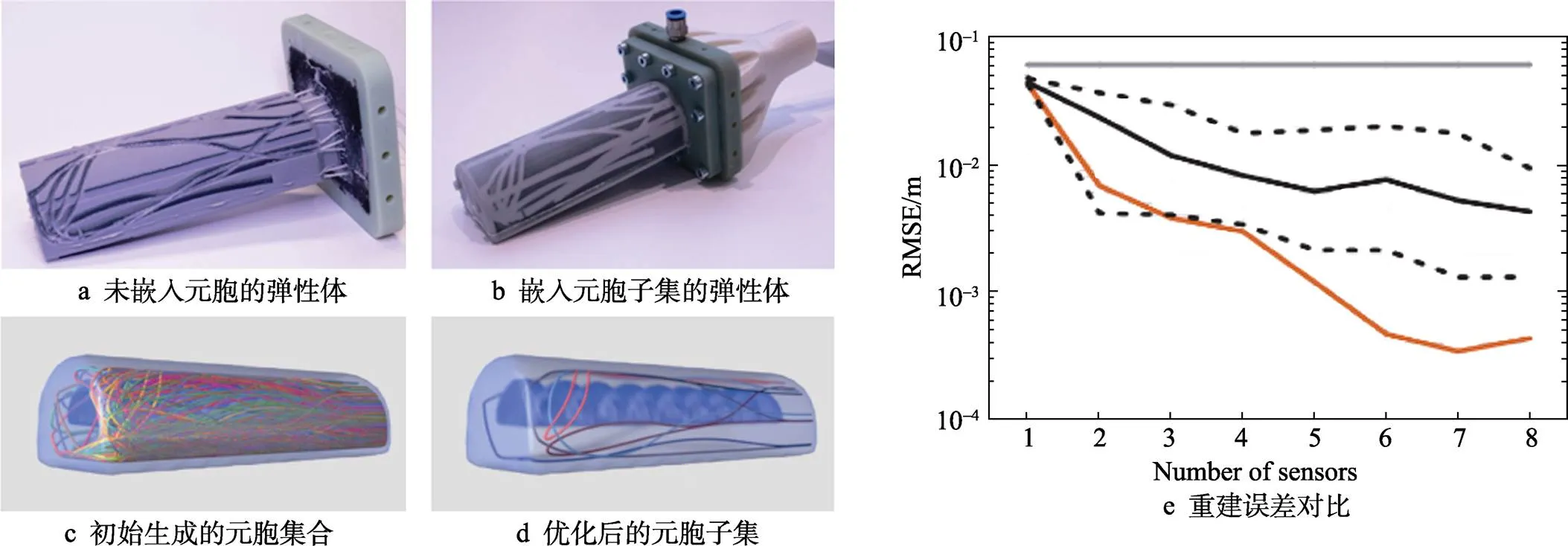
图9 柔性表面变形自感知的元胞设计
3 自感型功能结构的基元构型制造
自感型功能结构的设计过程中,制备自感型功能结构是重要的一环,功能基元是能够实现自感型功能结构感知的最基础结构,实现功能基元的制造就能实现自感型功能结构整体的制造。功能基元的自感型功能结构基元的制备方法和工艺与功能结构所采用的材料有紧密联系,根据上文提出的压电、电容、液态金属3类材料,其对应的制备方法主要包括铸模浇筑、丝网印刷、3D打印、失蜡成型、光刻成型等[49-51]。由于自感型功能结构的元胞结构尺度较小,通常为微米级,且其内部结构较为复杂,如花粉状层级结构[24],TPE基碳纳米管3D网络结构[25],蛛网启发的裂纹结构[26]等微结构,因此对制备工艺的精度要求较高[52]。该小节针对压电材料和电容材料常用的3D打印方法和液态金属材料常用的微流道制造方法这两种重要的制造工艺进行了归纳总结。
3.1 自感型功能结构功能基元的3D打印制备方法
3D打印是自感型功能结构的常见制备方式,作为一种新兴的增材制造技术,可实现复杂立体结构的一体式快速打印制造[43]。针对不同的打印原理,3D打印方法可细分为基于光聚合、材料挤出、薄片层压、粘合剂喷射、动力床融合和直接能量沉积等一系列打印方法,具有可制造复杂结构,可结合新型材料,操作灵活简单等优点[53-55]。鉴于上述优秀的特性,目前在机械制造领域被用于金属加工工艺[56-57],在生物医疗领域被用于打印器官芯片[58]、类脑组织和神经细胞[59],在化学、建筑等多个领域具有巨大潜力[60-61]。
在3D打印技术中,熔融沉积成型(FDM)是最经济的方法,该方法将热熔性材料通过加热的喷嘴熔融挤出,同时通过步进电机驱动喷嘴在平面上逐层打印,最终形成三维结构[53]。由于熔融沉积成型方法需要将材料从喷嘴挤出,所以用于自感型功能结构基元制造的敏感元件材料需预先将材料制成长丝。Kim等[62]和Christ等[63]采用多壁碳纳米管(MWCNT)和热塑性聚氨酯(TPU)混合制成的打印材料,通过熔融沉积成型的方法制造基元。制造的基元不仅具有优秀的可拉伸性和层间粘合性,在外力的作用下也表现出可通过建模预测的压阻特性,见图10a。Lee等[64]和Kim等[65]采用聚偏氟乙烯(PVDF)通过集成的熔融沉积和电晕极化技术制造基元。这种技术通过带电针和栅极产生和控制的高电场促进了加热环境下PVDF分子链的偶极矩排列。制造的基元具有压电性能,电压越高,电活性最高的β相含量越大,产生的电流输出和压电系数越大,见图10b。
墨水直写式打印(DIW)使用气动喷嘴或注射器喷嘴挤出具有流变特性的可打印墨水,自底向上逐层制造几何结构。与熔融沉积成型相比,DIW打印成型的基元具有更复杂的结构,更高的精度和效率[54]。Yan等[66]运用了Vaseem等[67]制备的一种银油墨溶液,将其作为DIW的打印墨水来打印基元电极。在银电极的基础上,利用聚二烯丙基二甲基氯化铵(PDDA)材料制成的墨水打印传感层,用于感知空气湿度的变化。制造的基元在响应时间和迟滞方面表现出优秀的性能,且相对湿度从10%到90%,可获得大于99%的传感响应,见图10c。Chen等[68]利用2种PDMS材料(Sylgard184和SE1700)制成了具有高粘度的墨水并通过DIW技术打印基元。因为墨水具有高粘度,所以制造的基元具有更好的形状保持能力和更高的机械强度。Peng等[69]和Valentine等[70]均采用了包含DIW打印技术的混合打印工艺用于基元的制造。前者将数字光处理打印(DLP)和DIW集成,可以使用多种墨水和树脂打印机械性能可调、层间粘合性好的复合材料;后者将自动拾取、放置技术和DIW集成,使任意形状的基元可以被制造并且可阵列,见图10d和图10e。

图10 熔融沉积法和墨水直写法
3.2 自感型功能结构的微流道制造方法
在基于液态金属材料的自感型功能结构基元设计中,需要将液态金属封装在制造的基元中,因此需要考虑微流道的设计。其设计方法具有多样性,微流道的制备也拥有多种方法,其中最主要的是铸模浇筑和失蜡法2种。
铸模浇筑是预先用其他容易成型的材料做成零件结构形状的模具,再在模具空腔中浇注流动性液体,该液体冷却凝固之后就形成和模具形状结构完全一样的零件,在金属成型领域具有广泛的应用。由于基于液态金属材料的自感型功能结构多为硅基,而硅树脂打印在商用的3D打印机中通常难以实现,因此在制造基元的硅树脂基底时,常采用铸模浇筑的工艺,见图11a。Park等[71]在一种层状序构设计中应用了铸模浇筑的工艺,利用3D打印技术制造模具,将与AB胶混合后的硅橡胶倒入模具在60℃下快速固化并脱模。然后将敏感材料eGaln注入模具中成型的3层PDMS层的微流道中,并进行封装。设计的3层微流道结构分别为一对正交的应变栅结构和同心圆结构,在受到拉伸应变和轴向压力时分别表现出较大的响应,感知,轴2个方向的拉伸应变和轴的压力,从而实现三轴应变的自感知。
失蜡法一度被广泛应用于复杂金属铸件的制造中。在中国古代,工匠利用失蜡法制造了精美的青铜器[72]。在最近的研究中,失蜡法被用于气动手爪和微混合器的制造[73-75]。由于自感型功能结构基元的微流道尺度较小,结构复杂,而常规的3D打印方式难以满足中空结构的制造,因此在基元制备过程中,将微流道以可溶性材料填充,以支撑微流道上层的结构。填充的可溶性材料在基元制备完成后去除,形成中空的微流道,见图11b。Hamidi等[76]使用硅树脂(Ecoflex10)制造基元基底,在微流道处打印牺牲材料(Carbohydrate Glass)后继续打印用于封装基元的硅树脂,将基元置于水中去除可溶的牺牲材料,得到具有微流道层的基元。Kim等[46]利用聚乙烯醇(PVA)的水溶性,将其填充打印在硅基的微流道中,并在其上打印了聚乳酸(PLA)材料的刚性阵列,用水侵入基元去除PVA,得到具有高精度的中空微流道结构。

图11 工艺流程
4 自感型功能结构的序构综合调控与应用
自感型功能结构的空间序构调控即是自感型功能结构设计制造的最终步骤,其满足所有的设计需求。对空间序构而言,如何实现时间序列上的感知与响应和应用过程中的监测是其研究重点。具备自感知能力的功能结构具有传统功能结构不具备的独特优势,在健康监测领域,由于其良好的可拉伸性和轻便性,可用于长期监测病人脉搏、体温、皮肤接触压力等生理指标[1-3,46]。在机器人感知领域,既可用于传统刚性机器人末端执行器关节角度的感知,也可用于软体机器人基于各种原理的致动器的闭环控制和柔性结构的本体激励感知[6-7,48]。在运动检测领域,可用于足底压力的感知,在此基础上进行步态识别。为满足上述多个领域的不同应用,自感型功能结构序构需要感知多种形式的环境变化或本体激励。该小节对可感知外界压力激励、本体拉伸变形和本体弯曲变形3种自感型功能结构序构进行综述。
4.1 压力传感的自感型功能结构
外界压力激励是自感型功能结构序构常见的感知对象。其中,液态金属可单独作为感知压力的序构敏感材料。Wong等[77]提出了一种5×5阵列的空间序构,其表面具有柔顺性,可以包覆于人的手指用于触觉感知,在低负载下具有较好的灵敏度。Gao等[78]提出了一种采用惠斯通电桥结构的空间序构,其中封装的液态金属在外力负载下会流到不同的流道,实现不同次序、不同大小的时空响应。另一种基于压阻效应的序构应用炭黑、石墨烯、碳纳米管和液态金属等导电材料与硅基聚合物混合,形成固态的微通道[79]。Liu等[80]设计了一种基于截齿状凸台的层状序构,将石墨烯纳米颗粒与PDMS混合制成敏感层用于感知截齿状凸台传递的压力应变。Tapia等[48]利用液态金属和硅橡胶复合材料,设计了一种压阻式的网络状空间序构,可通过最优化算法提升其感知的精确性。还有一种应用新型材料的3D导电海绵压力感知序构分类由Ding等[81]提出。Ma等[82]应用了包覆多壁碳纳米管(MWCNTs)和石墨烯的导电聚氨酯(PU)海绵制作压阻式的3D海绵状序构,在外部压力(0~5.6 kPa)和大应变范围(0%~75%)下表现出优秀的相对抗性变化和传感性能。Li等[83]采用壳聚糖(CS)对聚氨酯(PU)海绵骨架进行处理得到带正电荷的CS@PU海绵,然后浸涂带负电荷的MXene片材,制备了具有检测小和大压力信号潜力的3D海绵状序构,其快速响应时间仅为19 ms。
4.2 拉伸传感的自感型功能结构
拉伸变形是最为基础的本体激励,实现对本体拉伸变形的感知具有重要意义。基于压阻原理的拉伸应变自感知序构得到了广泛研究。Gao等[84]采用Ecoflex和eGaln材料,设计了在拉伸向方向上具有超柔性的拉伸应变自感知序构,最大应变可达550%。Zhang等[85]设计了一种二维的拉伸应变自感知序构,包含硅橡胶丝、共晶镓铟和氧化皮纳米层3层结构,可感知周向应变,具有良好的循环电稳定性。Li等[86]在基于压阻原理的拉伸应变自感知序构研究基础上,对拉伸变形下的稳定性和可靠性进行系统研究。然而,基于压阻原理的拉伸应变自感知序构需外接电源和传感电路,不利于在可穿戴电子设备上的应用,且外部电源和传感电路有发生故障的可能性[87-88]。Han等[89]在Wang等[90]的基础上,合成了一种由PVA、PMR复合材料浸泡NaCl溶液得到的柔性导电水凝胶,将其用于制造原电池结构的拉伸应变自感知序构,可以在无外接电源的情况下灵敏地检测人体运动,见图12b。
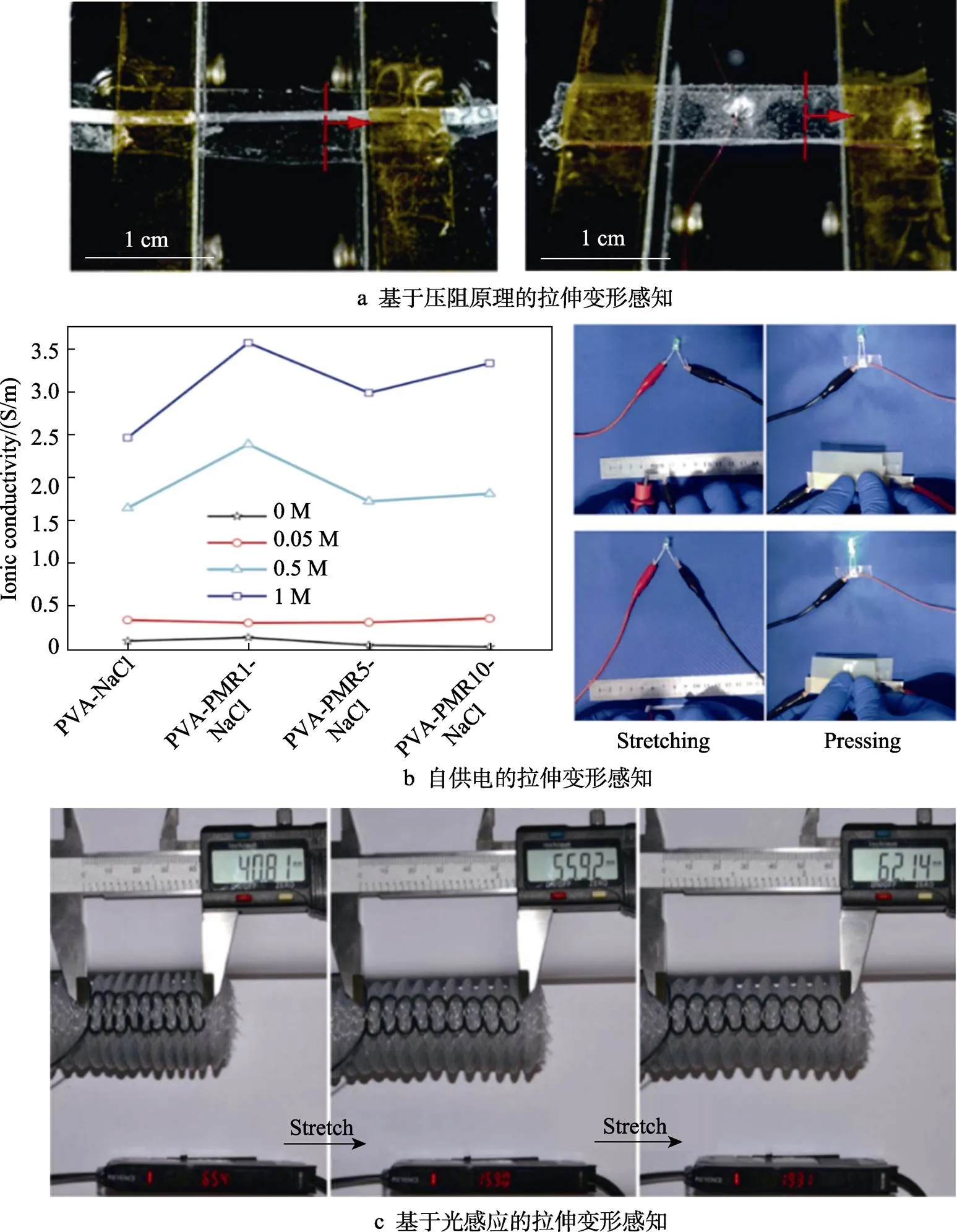
图12 感知拉伸变形的序构
另一类感知本体拉伸变形的自感型功能结构基于光感应,见图12c。Yang等[91]利用一种新型光纤布拉格光栅(FBG)设计了一种能感知周向应变的序构,由熔融沉积方法成型。该序构的波长与拉伸变化呈线性关系,测量灵敏度为0.021 8 nm/mm,最大测量误差为1.59%,具有良好的感知精度和响应。Sareh等[92]设计了一种具有拉伸感知能力的序构,由光纤组成,基于光纤调节通过光纤内部的光强,再将光强转换为电信号进行处理和分析实现感知。基于光感应的拉伸变形感知序构具有不受电磁场影响的显著优点,在电磁干扰环境下具有潜在应用前景[93]。
4.3 弯曲传感的自感型功能结构
随着软体机器人和柔性电子领域的蓬勃发展,基于柔性材料的连续体结构得到了大量的研究。不同于传统刚性机器人,软体机器人的自由度具有高度冗余的特征,由此对柔性结构各部分弯曲变形的感知变得十分重要[93-94]。基于压阻原理的自感型功能结构常被用于感知弯曲变形,见图13a。Cooper等[95]利用静电纺丝制作流道的方式设计了一种具有双螺旋液态金属纤维的角度变化自感知序构。Liu等[96]和Konishi等[97]设计了集成液态金属微流道的序构,可应用在软体机器人末端执行器感知气动手指的弯曲变形。这一类型的序构在感知弯曲变形时具有制备简单,应用灵活的特点,但在没有外接放大电路的情况下,序构感知灵敏度较低[45]。
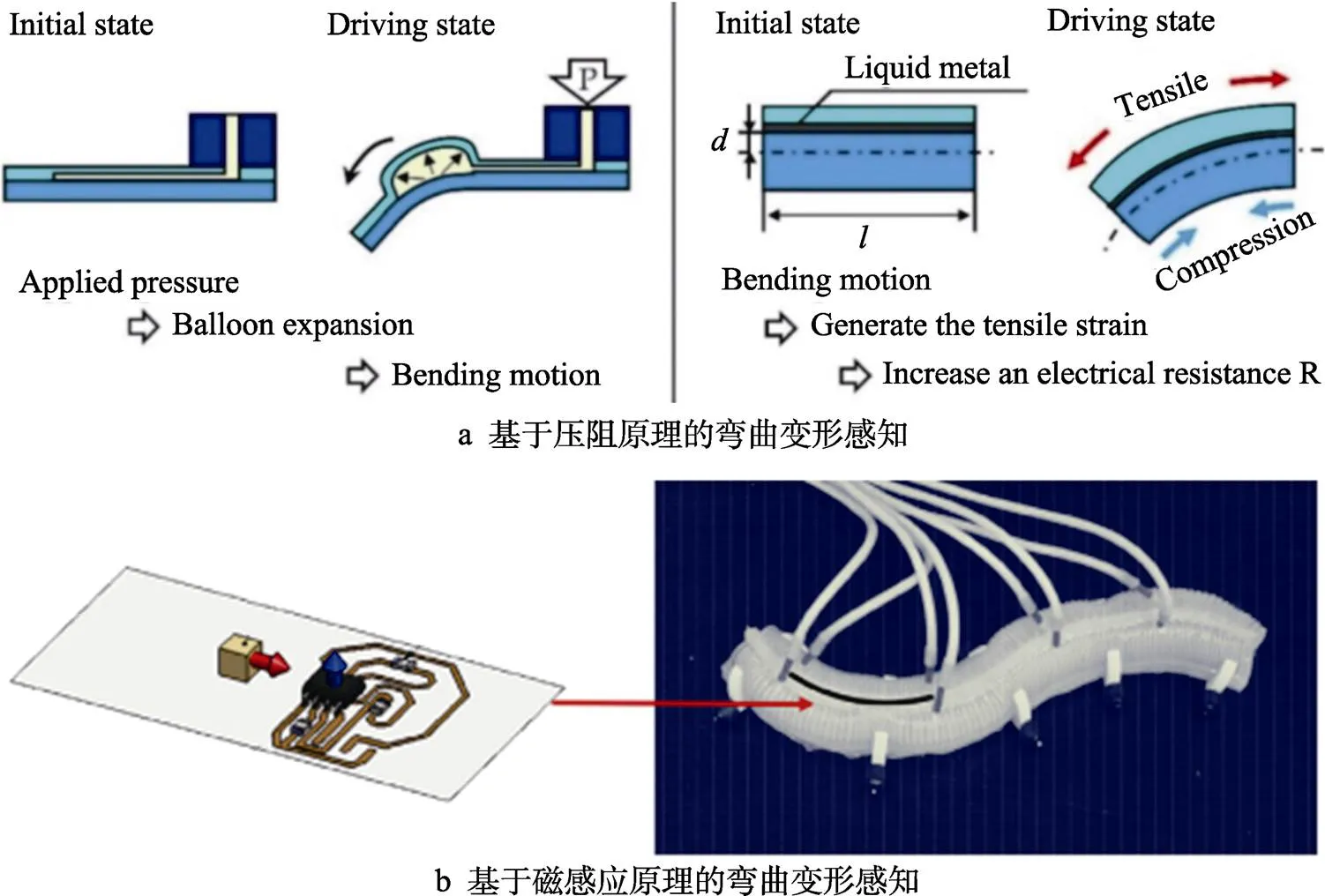
图13 感知弯曲变形的序构
基于磁感应的自感型功能结构也被用于感知本体的弯曲变形,通常采用霍尔元件作为敏感元件,见图13 b。霍尔元件在传统机器人关节角度感知中已有相当成熟的应用,在柔性电子领域中,已有将铋[98]、石墨烯[99-100]等层状材料沉积在柔性基底上的研究。Ozel等[101]设计了一种可感知曲率变化的序构,利用永磁体和霍尔元件,精确感知序构变形时弯曲段的曲率(不过滤固有噪声情况下,测量曲率和实际曲率的均方根误差为0.023 cm–1),且能实现无接触传感。Granell等[102]提出了磁性薄膜中的平面霍尔效应概念,根据此概念设计的自感型功能结构序构可以有效检测200 nT的磁场,感知序构微小角度的变形。
5 结语
自感型功能结构是利用新型材料和新基元构型对外界激励和本体激励具有感知能力的功能结构。自感型功能结构感知元胞利用材料特性形成了不同类型的微结构构型,实现了最基本的功能—结构一体化。由于应用了压电、电容材料等新型材料,其基元制备主动迎合新的制造技术,如墨水直写、光固化等成型原理的3D打印技术和微流道制造技术等,为新型材料的应用和复杂结构、微结构的基元拓扑构型制造开辟了潜在的道路。通过检测压力、温度、电磁场等环境激励或拉伸、弯曲、扭转等本体激励,其空间序构能实现多场景下的环境、本体感知。因此,自感型功能结构具有广泛适用性的空间序构可被应用于健康监测、植入式医疗、机器人感知、运动检测等多个领域,且具有结构高效化、重量轻质化、感知集成化等关键优势。
文中综述的自感型功能结构设计与制造方法有独特优势,但仍有一定的局限性。例如,目前的自感型功能结构仍处于迸发阶段,其主要依赖于材料的创新进行研究,而其可靠性仍有不足;空间序构的监测方法依赖于拟合和经验公式,缺乏与其本构关系的构建与人工智能算法的应用,且其控制精度也有待提高。因此,需要通过综合自感型功能结构的元胞性能设计、基元构型分布配置与序构综合调控的设计方法,设计求解满足性能指标的最优自感型功能结构,实现自感型功能结构精确的环境及本体感知与响应,为功能—结构一体化的自感型功能结构设计提供理论依据、方法支撑及工具。
[1] LI Mu-fang, CHEN Jia-xin, ZHONG Wei-bing, et al. Large- Area, Wearable, Self-Powered Pressure-Temperature Sensor Based on 3D Thermoelectric Spacer Fabric[J]. ACS Sensors, 2020, 5(8): 2545-2554.
[2] KIM Y, OH J H. Recent Progress in Pressure Sensors for Wearable Electronics: From Design to Applications[J]. Applied Sciences, 2020, 10(18): 6403.
[3] 汪康, 喻研. 柔性压阻式压力传感器应用与展望[J]. 功能材料与器件学报, 2022, 28(1): 68-78.
WANG Kang, YU Yan. Applications and Prospects of Flexible Piezoresistive Pressure Sensors[J]. Journal of Functional Materials and Devices, 2022, 28(1): 68-78.
[4] WANG Li-li, JIANG Kai, SHEN Guo-zhen. Wearable, Implantable, and Interventional Medical Devices Based on Smart Electronic Skins[J]. Advanced Materials Technologies, 2021, 6(6): 2100107.
[5] LI Tong, FENG Zhang-qi, QU Ming-he, et al. Core/Shell Piezoelectric Nanofibers with Spatial Self-Orientated Β-Phase Nanocrystals for Real-Time Micropressure Monitoring of Cardiovascular Walls[J]. ACS Nano, 2019, 13(9): 10062-10073.
[6] RAMADOSS T S, ISHII Y, CHINNAPPAN A, et al. Fabrication of Pressure Sensor Using Electrospinning Method for Robotic Tactile Sensing Application[J]. Nanomaterials (Basel, Switzerland), 2021, 11(5): 1320.
[7] ZHU Ling-feng, WANG Yan-cheng, MEI De-qing, et al. Development of Fully Flexible Tactile Pressure Sensor with Bilayer Interlaced Bumps for Robotic Grasping Applications[J]. Micromachines, 2020, 11(8): 770.
[8] LU Nan-shu, LU Chi, YANG Shi-xuan, et al. Highly Sensitive Skin-Mountable Strain Gauges Based Entirely on Elastomers[J]. Advanced Functional Materials, 2012, 22(19): 4044-4050.
[9] TSOUTI V, MITRAKOS V, BROUTAS P, et al. Modeling and Development of a Flexible Carbon Black-Based Capacitive Strain Sensor[J]. IEEE Sensors Journal, 2016, 16(9): 3059-3067.
[10] GUO Xiao-hui, HUANG Ying, ZHAO Yu-nong, et al. Highly Stretchable Strain Sensor Based on SWCNTS/ CB Synergistic Conductive Network for Wearable Human-Activity Monitoring and Recognition[J]. Smart Materials and Structures, 2017, 26(9): 095017.
[11] JO H S, PARK C W, AN S, et al. Wearable Multifunctional Soft Sensor and Contactless 3D Scanner Using Supersonically Sprayed Silver Nanowires, Carbon Nanotubes, Zinc Oxide, and PEDOT: PSS[J].NPG Asia Materials, 2022, 14(1): 1-13.
[12] LIU Meng-yang, HANG Cheng-zhou, WU Xue-yan, et al. Investigation of Stretchable Strain Sensor Based on CNT/AgNW Applied in Smart Wearable Devices[J]. Nanotechnology, 2022, 33(25): 2022Apr1;33(25).
[13] HEMPEL M, NEZICH D, KONG Jing, et al. A Novel Class of Strain Gauges Based on Layered Percolative Films of 2D Materials[J]. Nano Letters, 2012, 12(11): 5714-5718.
[14] PARK J J, HYUN W J, MUN S C, et al. Highly Stretchable and Wearable Graphene Strain Sensors with Controllable Sensitivity for Human Motion Monitoring[J]. ACS Applied Materials & Interfaces, 2015, 7(11): 6317-6324.
[15] HO D H, SUN Qi-jun, KIM S Y, et al. Stretchable and Multimodal all Graphene Electronic Skin[J]. Advanced Materials, 2016, 28(13): 2601-2608.
[16] ZHANG Dian-bo, YIN Rui, ZHENG Yan-jun, et al. Multifunctional MXene/CNTS Based Flexible Electronic Textile with Excellent Strain Sensing, Electromagnetic Interference Shielding and Joule Heating Performances[J]. Chemical Engineering Journal, 2022, 438: 135587.
[17] LU Yao, QU Xin-yu, WANG Si-ying, et al. Ultradurable, Freeze-Resistant, and Healable MXene-Based Ionic Gels for Multi-Functional Electronic Skin[J]. Nano Research, 2022, 15(5): 4421-4430.
[18] KIM K H, JANG N S, HA S H, et al. Highly Sensitive and Stretchable Resistive Strain Sensors Based on Microstructured Metal Nanowire/Elastomer Composite Films[J]. Small (Weinheim an Der Bergstrasse, Germany), 2018, 14(14): 1704232.
[19] WU Wen-zhuo, WEN Xiao-nan, WANG Zhong lin. Taxel- Addressable Matrix of Vertical-Nanowire Piezotronic Transistors for Active and Adaptive Tactile Imaging[J]. Science, 2013, 340(6135): 952-957.
[20] HU Guo-feng, ZHOU Ran-ran, YU Ruo-meng, et al. Piezotronic Effect Enhanced Schottky-Contact ZnO Micro/Nanowire Humidity Sensors[J]. Nano Research, 2014, 7(7): 1083-1091.
[21] WASEEM A, JOHAR M A, HASSAN M A, et al. Flexible Self-Powered Piezoelectric Pressure Sensor Based on GaN/p-GaN Coaxial Nanowires[J]. Journal of Alloys and Compounds, 2021, 872(1): 159661.
[22] KIM B H, YANG Sun-a, LEE Min-ku, et al. Properties of (Bi, M)ZrO3(M: Alkali Metals)-Modified (K, Na)NbO3Lead-Free Piezoceramics[J]. Ceramics International, 2017, 43(17): 15880-15885.
[23] JARUPOOM P, JAITA P, YIMNIRUN R, et al. Enhanced Piezoelectric Properties near the Morphotropic Phase Boundary in Lead-Free (1-)(Bi0.5K0.5)TiO3-Bi(Ni0.5Ti0.5)O3Ceramics[J]. Current Applied Physics, 2015, 15(11): 1521-1528.
[24] ZHAO Ting-ting, YUAN Li, LI Tong-kuai, et al. Pollen-Shaped Hierarchical Structure for Pressure Sensors with High Sensitivity in an Ultrabroad Linear Response Range[J]. ACS Applied Materials & Interfaces, 2020, 12(49): 55362-55371.
[25] YU Rui, XIA Tian-cheng, WU Bang, et al. Highly Sensitive Flexible Piezoresistive Sensor with 3D Conductive Network[J]. ACS Applied Materials & Interfaces, 2020, 12(31): 35291-35299.
[26] ZHANG Wei-guan, XIAO Yan, DUAN Yu, et al. A High-Performance Flexible Pressure Sensor Realized by Overhanging Cobweb-Like Structure on a Micropost Array[J]. ACS Applied Materials & Interfaces, 2020, 12(43): 48938-48947.
[27] 冯毅雄, 邱皓, 高一聪, 等. N-1型多面体夹芯结构体胞演化机理与性能正向设计[J]. 机械工程学报, 2020, 56(1): 119-131.
FENG Yi-xiong, QIU Hao, GAO Yi-cong, et al. Evolution Mechanism of Unit Cell and Performance Forward Design of N-1 Type Polyhedral Sandwich Structure[J]. Journal of Mechanical Engineering, 2020, 56(1): 119- 131.
[28] 高一聪, 曾思远, 冯毅雄, 等. 支持4D打印的可控变形结构设计研究进展[J]. 机械工程学报, 2020, 56(15): 26-38.
GAO Yi-cong, ZENG Si-yuan, FENG Yi-xiong, et al. Review of Design of Programmable Morphing Composite Structures by 4D Printing[J]. Journal of Mechanical Engineering, 2020, 56(15): 26-38.
[29] 吴杰, 王旭, 刘英, 等. 基于高分子聚合物的柔性传感器研究进展[J]. 传感器与微系统, 2022, 41(3): 7-11.
WU Jie, WANG Xu, LIU Ying, et al. Flexible Sensors Research Progress Based on High Molecular Polymer[J]. Transducer and Microsystem Technologies, 2022, 41(3): 7-11.
[30] AMJADI M, KYUNG K U, PARK I, et al. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review[J]. Advanced Functional Materials, 2016, 26(11): 1678-1698.
[31] LIM H R, KIM H S, QAZI R, et al. Advanced Soft Materials, Sensor Integrations, and Applications of Wearable Flexible Hybrid Electronics in Healthcare, Energy, and Environment[J]. Advanced Materials, 2020, 32(15): 1901924.
[32] 赵程, 蒋春燕, 张学伍, 等. 压电传感器测量原理及其敏感元件材料的研究进展[J]. 机械工程材料, 2020, 44(6): 93-98.
ZHAO Cheng, JIANG Chun-yan, ZHANG Xue-wu, et al. Piezoelectric Sensor Measurement Principles and Research Progress on Sensitive Element Materials[J]. Materials for Mechanical Engineering, 2020, 44(6): 93-98.
[33] LIAO Zhi-peng, LIU Wei-hua, WU You, et al. A Tactile Sensor Translating Texture and Sliding Motion Information into Electrical Pulses[J]. Nanoscale, 2015, 7(24): 10801-10806.
[34] SINAR D, KNOPF G K. Cyclic Liquid-Phase Exfoliation of Electrically Conductive Graphene-Derivative Inks[J]. IEEE Transactions on Nanotechnology, 2018, 17(5): 1020-1028.
[35] SINAR D, KNOPF G K. Disposable Piezoelectric Vibration Sensors with PDMS/ZnO Transducers on Printed Graphene-Cellulose Electrodes[J]. Sensors and Actuators A: Physical, 2020, 302(1): 111800.
[36] WU Hong-zhi, ZHANG Xuan, MA Zheng, et al. A Material Combination Concept to Realize 4D Printed Products with Newly Emerging Property/Functionality[J]. Advanced Science (Weinheim, Baden-Wurttemberg, Germany), 2020, 7(9): 1903208.
[37] SHARMA S, CHHETRY A, ZHANG Shi-peng, et al. Hydrogen-Bond-Triggered Hybrid Nanofibrous Membrane-Based Wearable Pressure Sensor with Ultrahigh Sensitivity over a Broad Pressure Range[J]. ACS Nano, 2021, 15(3): 4380-4393.
[38] ZHANG Hong-ying, WANG M Y, LI Ji-sen, et al. A Soft Compressive Sensor Using Dielectric Elastomers[J]. Smart Materials and Structures, 2016, 25(3): 035045.
[39] WANG Xue-long, XIA Zhi-dong, ZHAO Chen, et al. Microstructured Flexible Capacitive Sensor with High Sensitivity Based on Carbon Fiber-Filled Conductive Silicon Rubber[J]. Sensors and Actuators A: Physical, 2020, 312(1): 112147.
[40] ATALAY A, SANCHEZ V, ATALAY O, et al. Batch Fabrication of Customizable Silicone‐Textile Composite Capacitive Strain Sensors for Human Motion Tracking[J]. Advanced Materials Technologies, 2017, 2(9): 1700136.
[41] WANG Xue-lin, GUO Rui, LIU Jing. Liquid Metal Based Soft Robotics: Materials, Designs, and Applications[J]. Advanced Materials Technologies, 2019, 4(2): 1800549.
[42] ZHANG Ming-kuan, YAO Si-yuan, RAO Wei, et al. Transformable Soft Liquid Metal Micro/Nanomaterials[J]. Materials Science and Engineering: R: Reports, 2019, 138(1): 1-35.
[43] 汪延成, 鲁映彤, 丁文, 等. 柔性触觉传感器的三维打印制造技术研究进展[J]. 机械工程学报, 2020, 56(19): 239-252.
WANG Yan-cheng, LU Ying-tong, DING Wen, et al. Recent Progress on Three-Dimensional Printing Processes to Fabricate Flexible Tactile Sensors[J]. Journal of Mechanical Engineering, 2020, 56(19): 239-252.
[44] DICKEY M. Stretchable and Soft Electronics Using Liquid Metals[J]. Advanced Materials, 2017, 29(27): 1606425.
[45] 袁鑫. 面向软体机器人的液态金属柔性传感器的研究[D]. 苏州: 苏州大学, 2020.
YUAN Xin. Liquid Metal Based Flexible Sensors for Soft Robotics[D]. Suzhou: Soochow University, 2020.
[46] KIM K, CHOI J, JEONG Y, et al. Highly Sensitive and Wearable Liquid Metal-Based Pressure Sensor for Health Monitoring Applications: Integration of a 3D-Printed Microbump Array with the Microchannel[J]. Advanced Healthcare Materials, 2019, 8(22): 1900978.
[47] SUN Wen-guang, WANG Gang, YUAN Fei-yang, et al. A Biomimetic Fish Finlet with a Liquid Metal Soft Sensor for Proprioception and Underwater Sensing[J]. Bioinspiration & Biomimetics, 2021, 16(6): 1748-3190.
[48] TAPIA J, KNOOP E, MUTNÝ M, et al. MakeSense: Automated Sensor Design for Proprioceptive Soft Robots[J]. Soft Robotics, 2020, 7(3): 332-345.
[49] WAN Yong-biao, WANG Yan, GUO Chuan fei. Recent Progresses on Flexible Tactile Sensors[J]. Materials Today Physics, 2017, 1: 61-73.
[50] PENG Yi-yao, YANG Ning, XU Qian, et al. Recent Advances in Flexible Tactile Sensors for Intelligent Systems[J]. Sensors (Basel, Switzerland), 2021, 21(16): 5392.
[51] CHI Cheng, SUN Xu-guang, XUE Ning, et al. Recent Progress in Technologies for Tactile Sensors[J]. Sensors (Basel, Switzerland), 2018, 18(4): 948.
[52] AMOLI V, KIM S Y, KIM J S, et al. Biomimetics for High-Performance Flexible Tactile Sensors and Advanced Artificial Sensory Systems[J]. Journal of Materials Chemistry C, 2019, 7(47): 14816-14844.
[53] VYAVAHARE S, TERAIYA S, PANGHAL D, et al. Fused Deposition Modelling: A Review[J]. Rapid Prototyping Journal, 2020, 26(1): 176-201.
[54] HOU Zhen-zhong, LU Hai, LI Ying, et al. Direct Ink Writing of Materials for Electronics-Related Applications: A Mini Review[J]. Frontiers in Materials, 2021, 8(1): 647229.
[55] LIU Chang-yong, HUANG Ning-gui, XU Feng, et al. 3D Printing Technologies for Flexible Tactile Sensors Toward Wearable Electronics and Electronic Skin[J]. Polymers, 2018, 10(6): 629.
[56] 于忠斌, 张中标, 尹婷婷, 等. 金属3D打印技术概述[J]. 机械管理开发, 2022, 37(1): 266-268.
YU Zhong-bin, ZHANG Zhong-biao, YIN Ting-ting, et al. Review of Metal 3D Printing Technology[J]. Mechanical Management and Development, 2022, 37(1): 266-268.
[57] ZHANG L, QIAN B, ZHANG C, et al. Summary of Development Trend of Metal Additive Manufacturing Technology[J]. Material Science and Technology, 2022, 30(1): 42-52.
[58] 刘妍, 杨清振, 陈小明, 等. 3D打印技术制备器官芯片的研究现状[J]. 中国生物医学工程学报, 2020, 39(1): 97-108.
LIU Yan, YANG Qing-zhen, CHEN Xiao-ming, et al. Fabrication of Organ-on-a-Chip by 3D Printing Technology[J]. Chinese Journal of Biomedical Engineering, 2020, 39(1): 97-108.
[59] 王玲, 方奥, 申皓, 等. 3D打印的发展前沿——类脑组织打印[J]. 机械工程学报, 2018, 54(1): 197-204.
WANG Ling, FANG Ao, SHEN Hao, et al. The Development Frontier of 3D Printing - the Brain-Like Tissue Printing[J]. Journal of Mechanical Engineering, 2018, 54(1): 197-204.
[60] 赖石林, 廖旭, 张辉, 等. 3D打印技术在有机合成化学中的应用[J]. 有机化学, 2019, 39(7): 1858-1866.
LAI Shi-lin, LIAO Xu, ZHANG Hui, et al. Application of 3D Printing Technology in Organic Synthetic Chemistry[J]. Chinese Journal of Organic Chemistry, 2019, 39(7): 1858-1866.
[61] 张大旺, 王栋民. 3D打印混凝土材料及混凝土建筑技术进展[J]. 硅酸盐通报, 2015, 34(6): 1583-1588.
ZHANG Da-wang, WANG Dong-min. Progress of 3D Print of Concrete Materials and Concrete Construction Technology[J]. Bulletin of the Chinese Ceramic Society, 2015, 34(6): 1583-1588.
[62] KIM M, JUNG J, JUNG S, et al. Piezoresistive Behaviour of Additively Manufactured Multi-Walled Carbon Nanotube/Thermoplastic Polyurethane Nanocomposites[J]. Materials (Basel, Switzerland), 2019, 12(16): 2613.
[63] CHRIST J F, ALIHEIDARI N, AMELI A, et al. 3D Printed Highly Elastic Strain Sensors of Multiwalled Carbon Nanotube/Thermoplastic Polyurethane Nanocomposites[J]. Materials & Design, 2017, 131: 394-401.
[64] LEE C, TARBUTTON J A. Electric Poling-Assisted Additive Manufacturing Process for PVDF Polymer- Based Piezoelectric Device Applications[J]. Smart Materials and Structures, 2014, 23(9): 095044.
[65] KIM H, TORRES F, WU Yan-yu, et al. Integrated 3D Printing and Corona Poling Process of PVDF Piezoelectric Films for Pressure Sensor Application[J]. Smart Materials and Structures, 2017, 26(8): 085027.
[66] YAN Feng-jie, HUANG Wan-qing, SANG Xu-hui, et al. Direct Ink Write Printing of Resistive-Type Humidity Sensors[J]. Flexible and Printed Electronics, 2021, 6(4): 045007.
[67] VASEEM M, MCKERRICHER G, SHAMIM A. Robust Design of a Particle-Free Silver-Organo-Complex Ink with High Conductivity and Inkjet Stability for Flexible Electronics[J]. ACS Applied Materials & Interfaces, 2016, 8(1): 177-186.
[68] CHEN Hu-yue, ZHANG Wen-ming, LI Xiu-yuan, et al. Direct ink writing of pure PDMS for soft 3D microstructures and tactile sensors[C]// 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers). Orlando: IEEE, 2021: 525-528.
[69] PENG Xi-rui, KUANG Xiao, ROACH D J, et al. Integrating Digital Light Processing with Direct Ink Writing for Hybrid 3D Printing of Functional Structures and Devices[J]. Additive Manufacturing, 2021, 40: 101911.
[70] VALENTINE A D, BUSBEE T A, BOLEY J W, et al. Hybrid 3D Printing of Soft Electronics[J]. Advanced Materials, 2017, 29(40): 1703817.
[71] PARK Y L, CHEN B R, WOOD R J. Design and Fabrication of Soft Artificial Skin Using Embedded Microchannels and Liquid Conductors[J]. IEEE Sensors Journal, 2012, 12(8): 2711-2718.
[72] YANG H. A Brief Discussion on the Century-Long Research History of Lost-Wax Casting in the Chinese Bronze Age[J]. The Chinese Journal for the History of Science and Technology, 2021, 42(1): 136-149.
[73] 张兴隆, 冯杨倩, 华超, 等. 气动软体手爪的失蜡铸造及试验分析[J]. 林业机械与木工设备, 2021, 49(7): 46-51.
ZHANG Xing-long, FENG Yang-qian, HUA Chao, et al. Lost-Wax Casting and Experimental Analysis of Pneumatic Soft-Bodied Grippers[J]. Forestry Machinery & Woodworking Equipment, 2021, 49(7): 46-51.
[74] TACHIBANA D, MATSUBARA K, MATSUDA R, et al. 3D Helical Micromixer Fabricated by Micro Lost-Wax Casting[J]. Advanced Materials Technologies, 2020, 5(1): 1900794.
[75] CHEN Bo-han, SHAO Zhu-yin, XIE Zhe-xin, et al. Soft Origami Gripper with Variable Effective Length[J]. Advanced Intelligent Systems, 2021, 3(10): 2000251.
[76] HAMIDI A, TADESSE Y. 3D Printing of very Soft Elastomer and Sacrificial Carbohydrate Glass/Elastomer Structures for Robotic Applications[J]. Materials & Design, 2020, 187: 108324.
[77] PONCE WONG R D, POSNER J D, SANTOS V J. Flexible Microfluidic Normal Force Sensor Skin for Tactile Feedback[J]. Sensors and Actuators A: Physical, 2012, 179: 62-69.
[78] GAO Yu-ji, OTA H, SCHALER E W, et al. Wearable Microfluidic Diaphragm Pressure Sensor for Health and Tactile Touch Monitoring[J]. Advanced Materials (Deerfield Beach, Fla), 2017, 29(39): 2017Oct;29(39).
[79] ZHENG Qing-bin, LEE J H, SHEN Xi, et al. Graphene-Based Wearable Piezoresistive Physical Sensors[J]. Materials Today, 2020, 36: 158-179.
[80] 刘洋. 机器人手可穿戴的压阻式柔性触觉传感器结构设计及其研制[D]. 杭州: 浙江大学, 2020.
LIU Yang. Structural Design and Fabrication of the Wearable Piezoresistive Flexible Tactile Sensor for Robotic Hands[D]. Hangzhou: Zhejiang University, 2020.
[81] DING Yi-chun, XU Tao, ONYILAGHA O, et al. Recent Advances in Flexible and Wearable Pressure Sensors Based on Piezoresistive 3D Monolithic Conductive Sponges[J]. ACS Applied Materials & Interfaces, 2019, 11(7): 6685-6704.
[82] MA Zhong-lei, WEI A-jing, MA Jian-zhong, et al. Lightweight, Compressible and Electrically Conductive Polyurethane Sponges Coated with Synergistic Multiwalled Carbon Nanotubes and Graphene for Piezoresistive Sensors[J]. Nanoscale, 2018, 10(15): 7116-7126.
[83] LI Xiao-peng, LI Yue, LI Xiao-feng, et al. Highly Sensitive, Reliable and Flexible Piezoresistive Pressure Sensors Featuring Polyurethane Sponge Coated with MXene Sheets[J]. Journal of Colloid and Interface Science, 2019, 542: 54-62.
[84] GAO Qin-wu, LI Hui, ZHANG Jin-jie, et al. Microchannel Structural Design for a Room-Temperature Liquid Metal Based Super-Stretchable Sensor[J]. Scientific Reports, 2019, 9(1): 5908.
[85] ZHANG Qiang, ROACH D J, GENG Lu-chao, et al. Highly Stretchable and Conductive Fibers Enabled by Liquid Metal Dip-Coating[J]. Smart Materials and Structures, 2018, 27(3): 035019.
[86] LI Meng-lu, WU Yong-zhi, ZHANG Liang, et al. Liquid Metal-Based Electrical Interconnects and Interfaces with Excellent Stability and Reliability for Flexible Electronics[J]. Nanoscale, 2019, 11(12): 5441-5449.
[87] WANG Yang, ZHANG Li-na, LU Ang. Highly Stretchable, Transparent Cellulose/PVA Composite Hydrogel for Multiple Sensing and Triboelectric Nanogenerators[J]. Journal of Materials Chemistry A, 2020, 8(28): 13935- 13941.
[88] SUI X J, GUO H S, CHEN P G, et al. Zwitterionic Osmolyte-Based Hydrogels with Antifreezing Property, High Conductivity, and Stable Flexibility at Subzero Temperature[J]. Advanced Functional Materials, 2020, 30(7): 1907986.
[89] HAN Li-bin, ZHOU Qi-feng, CHEN Dong-sheng, et al. Flexible Sensitive Hydrogel Sensor with Self-Powered Capability[J]. Colloids and Surfaces A: Physicochemical and Engineering Aspects, 2022, 639: 128381.
[90] WANG Jie, TANG Fu, WANG Yue, et al. Self-Healing and Highly Stretchable Gelatin Hydrogel for Self-Powered
Strain Sensor[J]. ACS Applied Materials & Interfaces, 2020, 12(1): 1558-1566.
[91] YANG Yu-yao, HONG Cheng-yu, AHMED ABRO Z, et al. A New Fiber Bragg Grating Sensor Based Circumferential Strain Sensor Fabricated Using 3D Printing Method[J]. Sensors and Actuators A: Physical, 2019, 295: 663-670.
[92] SAREH S, NOH Y, LI Min, et al. Macrobend Optical Sensing for Pose Measurement in Soft Robot Arms[J]. Smart Materials and Structures, 2015, 24(12): 125024.
[93] 王田苗, 郝雨飞, 杨兴帮, 等. 软体机器人: 结构、驱动、传感与控制[J]. 机械工程学报, 2017, 53(13): 1-13.
WANG Tian-miao, HAO Yu-fei, YANG Xing-bang, et al. Soft Robotics: Structure, Actuation, Sensing and Control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-13.
[94] LIPSON H. Challenges and Opportunities for Design, Simulation, and Fabrication of Soft Robots[J]. Soft Robotics, 2014, 1(1): 21-27.
[95] [95] COOPER C B, ARUTSELVAN K, LIU Ying, et al. Sensors: Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers[J]. Advanced Functional Materials, 2017, 27(20): 1605630.
[96] Liu H, Yang M, Yuan X, et al. Liquid Metal Based Flexible Sensors for Soft Manipulator towards Human-Machine Interaction[J]. China Mechanical Engineering, 2021, 32(12): 1470-1478.
[97] KONISHI S, MORI F, SHIMIZU A, et al. Structural Reinforcement Effect of a Flexible Strain Sensor Integrated with Pneumatic Balloon Actuators for Soft Microrobot Fingers[J]. Micromachines, 2021, 12(4): 395.
[98] MELZER M, MÖNCH J I, MAKAROV D, et al. Wearable Magnetic Field Sensors for Flexible Electronics[J]. Advanced Materials (Deerfield Beach, Fla), 2015, 27(7): 1274-1280.
[99] UZLU B, WANG Zhen-xing, LUKAS S, et al. Gate- Tunable Graphene-Based Hall Sensors on Flexible Substrates with Increased Sensitivity[J]. Scientific Reports, 2019, 9: 18059.
[100] KAIDAROVA B A, LIU Wen-hao, SWANEPOEL L, et al. Flexible Hall Sensor Made of Laser-Scribed Graphene[J]. Npj Flexible Electronics, 2021, 5: 2.
[101] OZEL S, KESKIN N A, KHEA D, et al. A Precise Embedded Curvature Sensor Module for Soft-Bodied Robots[J]. Sensors and Actuators A: Physical, 2015, 236: 349-356.
[102] GRANELL P N, WANG Guo-liang, CAÑON BERMUDEZ G S, et al. Highly Compliant Planar Hall Effect Sensor with Sub 200 nT Sensitivity[J]. Npj Flexible Electronics, 2019, 3: 3.
Frontiers and Prospects of Self-sensing Functional Structure Research
FENG Yi-xiong1,2, LI Pu-yan1,2, QIU Hao1,2, ZENG Si-yuan1,2, TAN Jian-rong1,2
(1. a. State Key Laboratory of Fluid Power & Mechatronic Systems b. Engineering Research Center for Design Engineering and Digital Twin of Zhejiang Province, Zhejiang University, Hangzhou 310027, China; 2. Research Institute for Green Intelligent Manufacturing Industry Technology of Huzhou, Zhejiang Huzhou 313000, China)
This paper aims to summarize and analyze the research progress of self-sensing functional structure and put forward the prospect of its development. In this paper, the concept of self-sensing functional structure was defined, its design process was analyzed, its connotation was revealed, and the research progress of self-sensing functional structure design was classified from the perspectives of sensitive materials, manufacturing methods and excitation. It is proved that it can be prepared by cell performance design, primitive configuration manufacturing and sequence synthesis control and applied to practical scenarios to realize structure-function integration. As a result, the research progress in the design and manufacture of self-sensing functional structures was summarized, and the key technologies and outstanding achievements in different fields of self-sensing functional structures were summarized. Together with the concept and connotation of self-sensing functional structures, its application in machinery, materials, biology and other fields was prospected. Self-sensing functional structure can sense the changes of ontology and environment, and change function or performance in a specified way as designed. It has the characteristics of efficient structure configuration, diverse sensing objects and integrated sensing elements, and has a broad application prospect in related fields.
functional structure; environmental perception; sensor; design method; advanced manufacturing technology
TB472
A
1001-3563(2022)12-0015-15
10.19554/j.cnki.1001-3563.2022.12.002
2022–01–22
国家自然科学基金(52130501);湖州市重点研发计划(2019GZ06);浙江省重点研发计划(2022C01196)
冯毅雄(1975—),男,教授,博士生导师,主要研究方向为现代机械设计理论与方法、产品数字化设计与制造、折纸与软体机器人等。
邱皓(1997—),女,博士生,主要研究方向为折纸工程与夹芯结构设计。
责任编辑:陈作
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
建材发展导向(2022年14期)2022-08-19
现代仪器与医疗(2022年3期)2022-08-12
中国应急管理科学(2022年2期)2022-05-23
航天制造技术(2022年2期)2022-05-17
现代仪器与医疗(2022年1期)2022-04-19
当代陕西(2021年21期)2022-01-19
现代企业(2021年11期)2021-12-08
中华诗词(2019年7期)2019-11-25
中学生数理化·高一版(2017年1期)2017-04-25