民机进近着陆飞行操纵人机交互适航场景捕获模型构建
2022-07-04 03:11陈农田满永政李俊辉
包装工程 2022年12期
陈农田,满永政,李俊辉
民机进近着陆飞行操纵人机交互适航场景捕获模型构建
陈农田,满永政,李俊辉
(中国民用航空飞行学院,四川 广汉 618307)
构建面向民机进近着陆任务的飞行操纵人机交互场景捕获模型,为进近着陆安全分析和民机正向设计提供参考。厘清场景捕获的基本内涵及层次任务,通过民机进近着陆操纵场景任务划分、场景维度设计、场景节点确定以及场景内容描述,建立人机交互场景捕获模型与实施程序。通过民机进近着陆中的下降、着陆等典型子任务场景,对民机进近着陆飞行操纵人机交互场景捕获实例进行验证与应用。成功构建了飞行操纵人机交互场景模型。针对民机进近着陆任务,构建了飞行操纵人机交互场景捕获模型,建立了飞行操纵场景任务及实施步骤,给出了飞行操纵场景节点与场景内容描述,为民机进近着陆系统安全性分析及基于正向的民机设计制造提供了理论依据。
进近着陆;场景模型;场景捕获;人机交互;民机设计
民机进近着陆是飞行过程中最复杂、最频繁和飞行事故率最高的飞行阶段,飞机起飞后3 min及落地前8 min统称为黑色11 min[1]。在飞机进近着陆过程中,飞行员精神高度集中,可供飞行员处理的时间极短。通过对近10年不安全事件的数据统计,除无法按飞行阶段分类的447起事故征候,在总数为927起的事故征候中,进近着陆阶段共227起,约占总数的30%,位居第一。由此可见,飞行进近着陆阶段成为民航运行安全风险程度最高的环节[2]。开展民机进近着陆飞行操纵人机交互场景捕获研究,对提前识别飞行员的操纵行为偏差,以及实施基于正向的民机设计和制造具有重要的现实意义。
近些年,国内外学者对飞机人机交互,特别是进近着陆阶段安全性问题开展了系列研究[3]。王晴昊等[4]基于系统理论,分析了进近着陆不安全事件。有学者运用灰色聚类方法开展了进近着陆安全性评估[5]。梅芊等[6]运用MBSE方法对飞机架构设计进行了分析,并以进近着陆为案例,提出了民机功能架构设计方法。Kluever[7]提出利用最优控制论建模、采用频域分析评估飞行手动控制动力系统操作质量的方法。王涛等[8]运用深度图对驾驶舱的飞行员手部动作进行了识别,并对进近着陆安全性进行了分析。汪磊等[9]运用快速记录存储器(Quick Access Recorder, QAR)大数据对飞行员风险行为进行了研究,构建了影响飞行员安全行为的重要指标。毛忠明等[10]运用自适应的神经模糊系统,对进近着陆阶段的飞行员操纵模型进行了设计与验证。
总之,国内外学者对民用飞机的进近和着陆安全性进行了系列研究,取得了许多有效的成果[11],特别是在安全行为风险和绩效评估方面,但是基于不同任务场景有关飞行员进近着陆操纵人机交互特征规律的研究少之又少。本文通过厘清场景捕获的基本内涵及层次任务,进行民机进近着陆操纵场景的任务划分、场景维度设计、场景节点设计,以构建场景捕获模型,最后以民机进近着陆典型子任务场景为例,对民机进近着陆飞行操纵人机交互适航场景捕获实例进行验证与应用。
1 民机进近着陆操纵人机交互场景捕获概述
1.1 场景概述
“场景”一词最初用于影视,后来用于计算机工程领域,并广泛应用于软件的前期分析,用于描述软件之间的交互关系[12-13]。场景的概念最早由美国学者提出,并预测未来是“场景时代”[14]。
不同的研究人员对场景进行了定义,目前,学者正在将场景技术应用于航空领域。在飞机适航领域应用方面,用来测定飞行场景(机组、飞机、环境等)之间各种各样复杂的动态关系[15]。场景还可以应用于民机机组工作量的评估,飞行中机组人员的工作量在不断变化。由于工作量的评估主要通过在特定场景下是否能完成预定任务来测定,所以场景的设计和选择至关重要[16-17]。也有学者利用场景描述飞机的运行环境,分析、识别飞机的功能[18-19]。
1.2 面向进近着陆任务的飞行操纵人机交互场景模型描述
对民机进近着陆场景的分析、判断和研究是进近着陆复杂动态环境下飞行员的安全保证。针对进近着陆时的各个场景,提出飞行员在各个场景下不同操作的原则及要求,确定各个场景的核心内容,绘制出飞行员操纵场景模型的构建流程,见图1。首先,确定民机进近着陆任务场景,由此划分进近着陆时的场景节点和维度设计。然后,基于此得出飞行员在不同维度和不同场景下的操作行为。最后,建立进近着陆任务的飞行员操纵场景模型以及实现步骤和内容要求,使其适用于飞行员操纵安全行为分析,也可为民机正向设计提供参考。
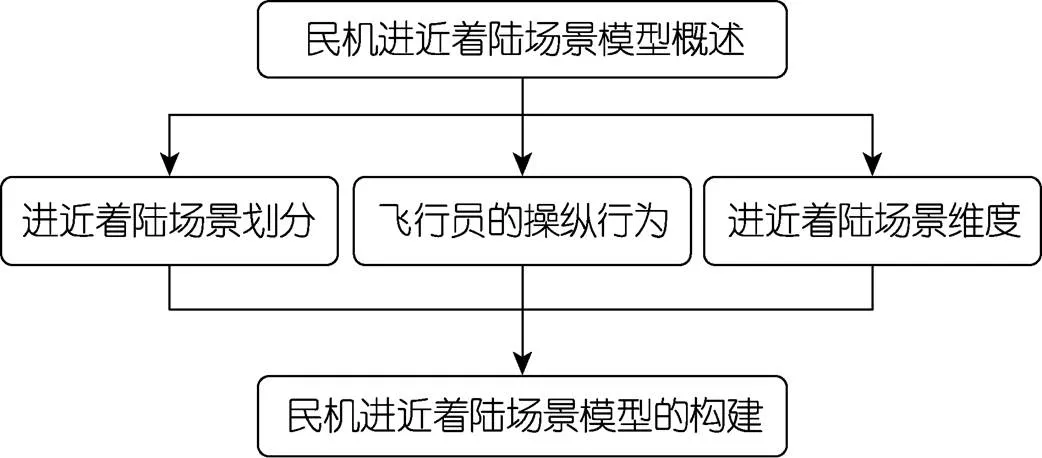
图1 模型构建流程图
1.3 民机进近着陆任务分析
仪表进近程序指飞行器通过飞机仪表提供方向、距离等信息,以实现飞行进近。可以将民机的进近着陆阶段分为起始进近航段、中间进近航段、精密航段和复飞航段。
仪表着陆系统(Instrument Landing System, ILS),俗称盲降系统,其进近程序起始阶段从进近定位点(Initial Approach Fix, IAF)开始,到中间进近定位点(Intermediate Fix, IF)为止。中间定位点在仪表进近程序航向信标的有效范围内。这个阶段的行为操作是为了降低飞机高度,并对准进近航段。中间进近航段是ILS的中间航段,从切入ILS航道的一点(中间进近点)开始,到切入下滑道最后的进近点(Final Approach Fix, FAP)终止,ILS与航迹方向保持一致,该阶段的目的是减小飞机的速度,降低飞机的高度,为精密航段做好准备。精密航段是从最后的进近点(FAP)开始,到复飞最后阶段的开始点或者复飞爬升到300 m高的一点终止。复飞航段是ILS进近的最后阶段,从最后进近航段到指定位置等待航线或者爬升到给定位置为止。
2 民机进近着陆操纵人机交互场景捕获模型构建
2.1 民机进近着陆操纵任务场景划分
民机飞行进近阶段是飞行的最后时段,是飞行员最为疲劳的时段,也是飞行事故高发的时段。因此,在进近和着陆阶段选择飞行员的机动任务,并在每种情况下分析和确定机动步骤,对行为安全分析至关重要。飞机在飞行的各个阶段中,需要完成某个阶段的飞行任务,也就是飞行任务的子任务,每个飞行阶段任务与子任务之间存在关联关系,每个子任务可以称之为一个场景,飞行员都有特定的操纵动作手势以及沟通语言。
根据ILS程序可以将进近着陆任务划分为:下降、进场、着陆、着陆后减速4个子任务场景,见图2。
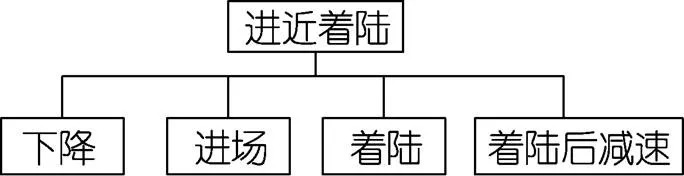
图2 划分任务场景
2.2 飞行进近着陆操纵任务场景维度设计
飞行进近着陆场景设计的目的是准确捕获飞行员的操纵行为,保证进近着陆的安全性,并尽可能完整地捕获场景。在场景捕获维度设计上,建立进近着陆场景多维矩阵,以实现场景捕获模型的完整性。
飞行进近着陆在任务维度上包括下降、进场、着陆、着陆后减速4个子任务场景,具有特定的时间和运行环境。参考有关的学者研究和飞机飞行手册,最终得出进近着陆飞行员操纵任务场景的3个维度分别为:进近着陆阶段、环境因素、飞机状态。进近着陆阶段划分4个子任务场景维度:下降、进场、着陆、着陆后减速。环境因素指飞机进近阶段所处的运行环境,包括气象条件(如低能见度、风切变等)、机场环境(湿跑道、污染跑道)等。飞机状态指飞机的适航状态,会直接影响到飞行员的操纵,甚至会使整个系统发生故障,直接诱发飞行事故的发生,如发动机故障、电气系统故障等。场景维度设计见图3。
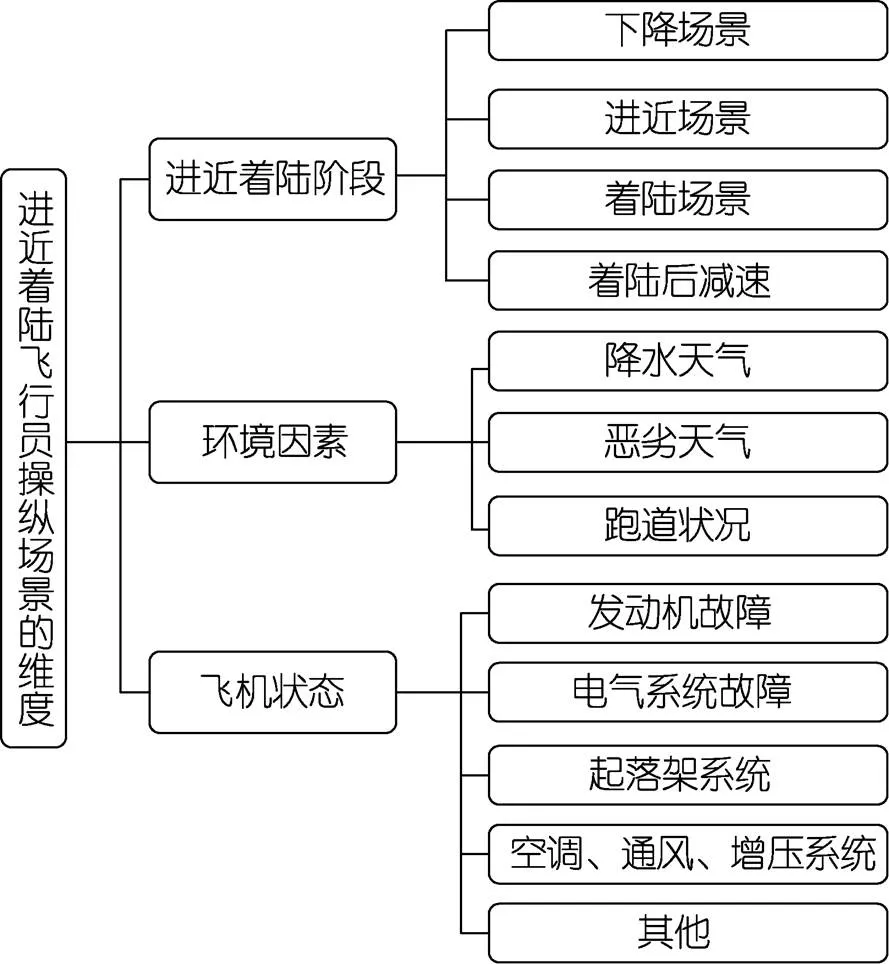
图3 场景维度设计
通过这3个维度可以看出,飞行进近着陆时飞行员操纵任务场景是一个多维的场景,每个维度可以把各个场景分为不同的子场景。这些子场景维度不同,每个维度代表的内容不同,这样就可以表示不同维度的飞行员操纵任务场景。
2.3 民机进近着陆操纵人机交互场景捕获模型设计
2.3.1 确定场景节点
民机进近着陆操纵场景维度包括:进近着陆阶段、环境因素、飞机状态3个方面。场景节点包含以上3个维度,并且各个维度之间相互独立,互不影响但交叉耦合。由此,这3个维度可以构建一个“多维矩阵”,并以此确定场景的节点。这3个维度包含多种情况,且维度不同。从每个维度中取出一种情况进行组合就可以形成多个场景的节点,见图4。
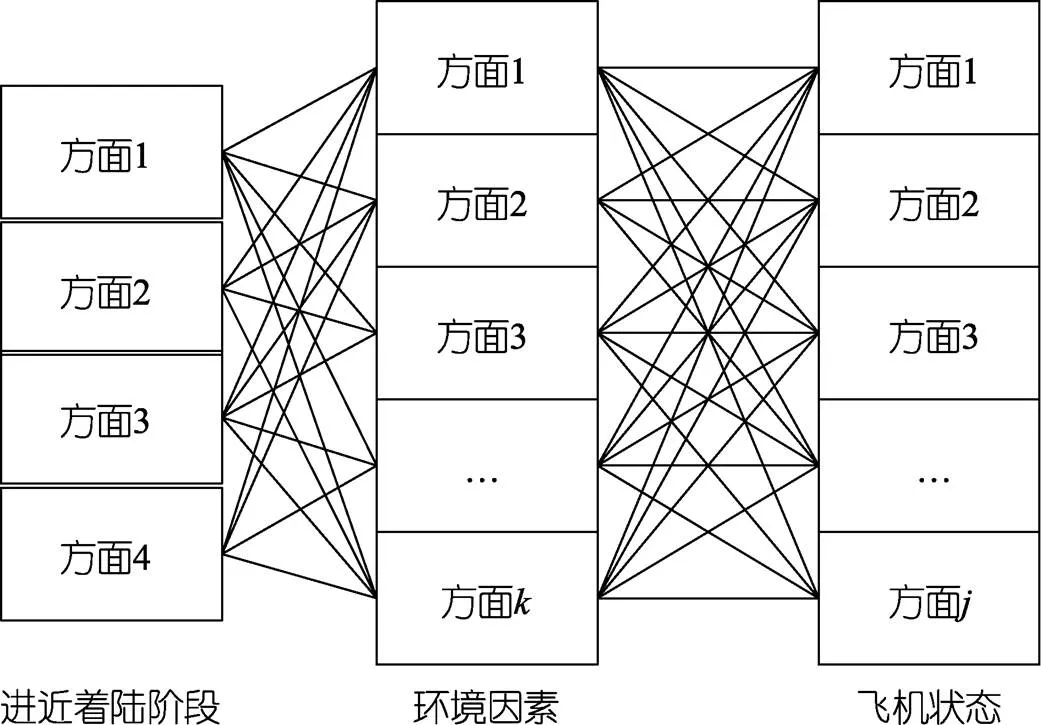
图4 捕获场景节点的设计
根据上文进近着陆阶段的维数4,设环境因素的维数为,飞机状态为,每个维度各取1,进行组合之后所得的集合为:4**,由此得到的数据能够结合实际情况,更加准确地描述场景节点。
确定场景节点的方法为:列一个场景节点的表单(见表1),采用“多维矩阵”的方法,通过场景维度(进近着陆的阶段、环境因素和飞机状态)来得出场景节点。
表1 确定场景节点

Tab.1 Determine scene node
2.3.2 人机交互场景描述
确定场景节点之后,根据场景节点来分析飞行员进近着陆的具体任务,根据分析可知,每个场景节点都包含多个子任务操作场景。场景描述是场景捕获的主体部分,包括飞行员的操纵任务、飞机功能、飞机要求和限制。此阶段主要用于解释飞行员在各种进场和着陆情况下的控制行为,从正向视角确保安全行为映射人机交互功能的需要。设定一个场景包含一个场景节点,这个节点包含这个阶段的任务,这个任务包括飞行员的操纵行为、飞机的功能和飞机的要求与限制,场景描述见表2。
表2 场景描述
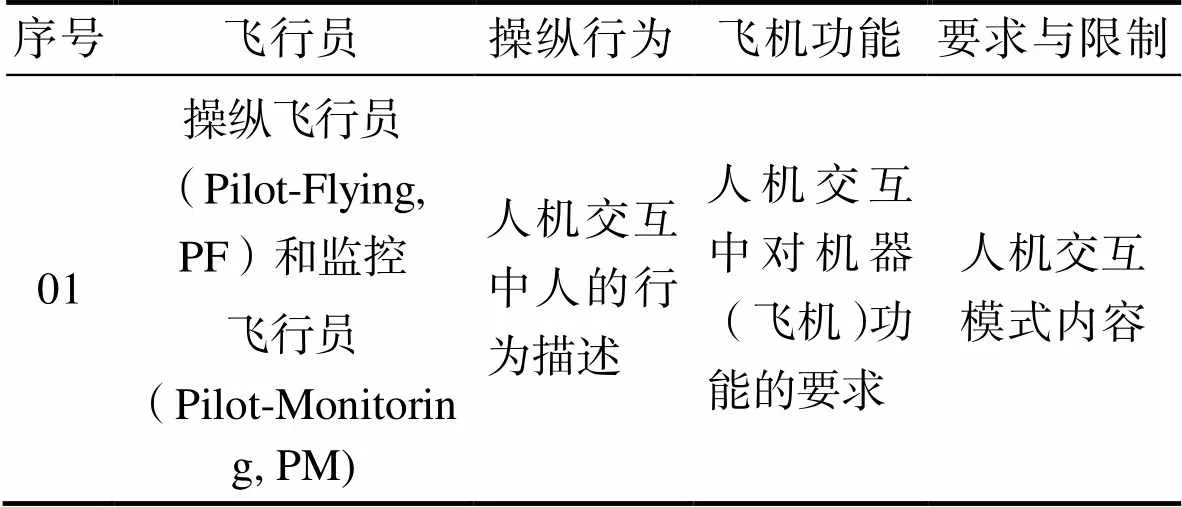
Tab.2 Scene description
2.3.3 民机进近着陆操纵人机交互场景捕获模型
飞行员操纵场景捕获模型的设计包括2个步骤,首先进行进近着陆操纵子任务分析,基本包括下降、进场、着陆以及着陆减速等子任务阶段,然后通过飞行员进近着陆操纵场景维度(进近着陆阶段、环境因素、飞机状态3个维度)来确定场景节点,最后根据确定的场景节点从飞行员的操纵行为、飞机的功能和飞机的要求与限制等角度进行场景描述,构建场景模型,见图5。
3 民机进近着陆飞行操纵人机交互场景捕获
3.1 民机飞行下降子任务下的飞行操纵人机交互场景捕获
民机进近着陆时下降场景捕获的第1步为确定场景节点(见表3)。确定进近着陆的阶段:下降阶段。确定场景环境因素:环境因素为正常,无恶劣或降水天气,跑道正常。确定场景维度的飞机状态:飞机状态为正常,无发动机故障、电气系统故障、起落架故障和其他故障。
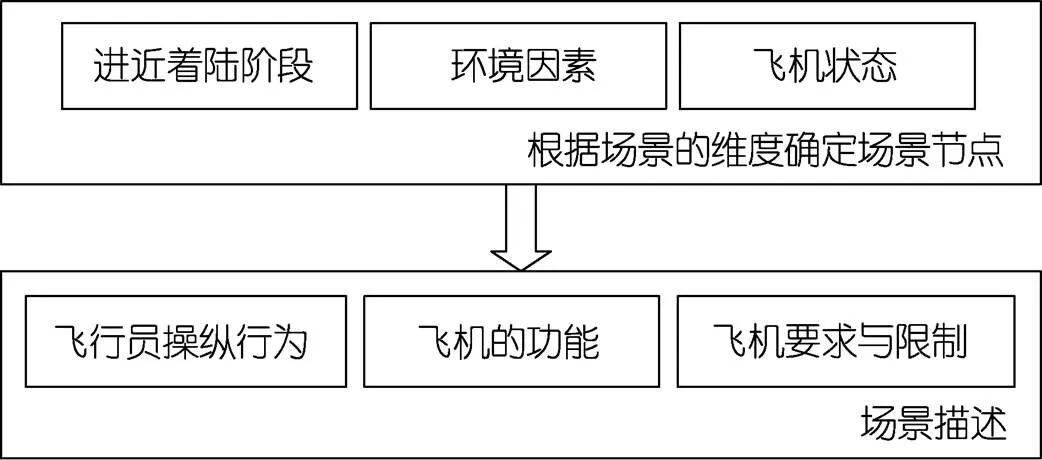
图5 飞行进近着陆场景飞行员操纵场景捕获的模型
表3 确定下降场景节点
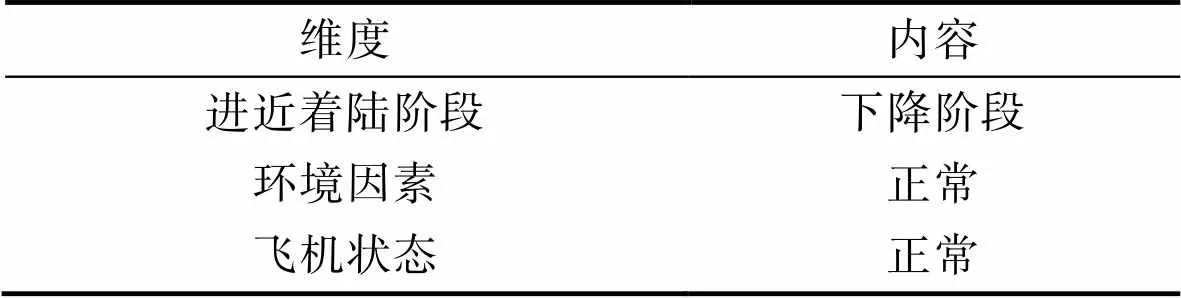
Tab.3 Determine the descending scene node
民机进近着陆时下降场景捕获的第2步为:根据第1步确定的下降场景节点,确定下降场景下飞行员的操纵行为任务,并根据具体的操纵任务分析飞机的功能和飞机的要求与限制,见表4。
3.2 民机飞行着陆子任务下的飞行操纵人机交互场景捕获
民机进近着陆时着陆场景捕获的第1步同样是确定场景节点,见表5。确定进近着陆的阶段:着陆阶段。确定场景环境因素:环境因素为正常,无恶劣、降水天气,跑道正常。确定场景维度的飞机状态:飞机状态为正常,无发动机、电气系统、起落架等故障。
表4 下降场景描述
Tab.4 Descending scene description
表5 确定着陆场景节点
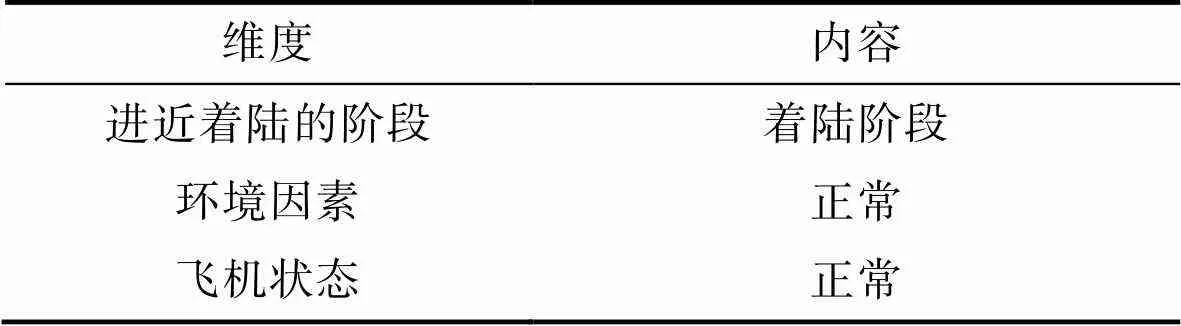
Tab.5 Determine the landing scene node
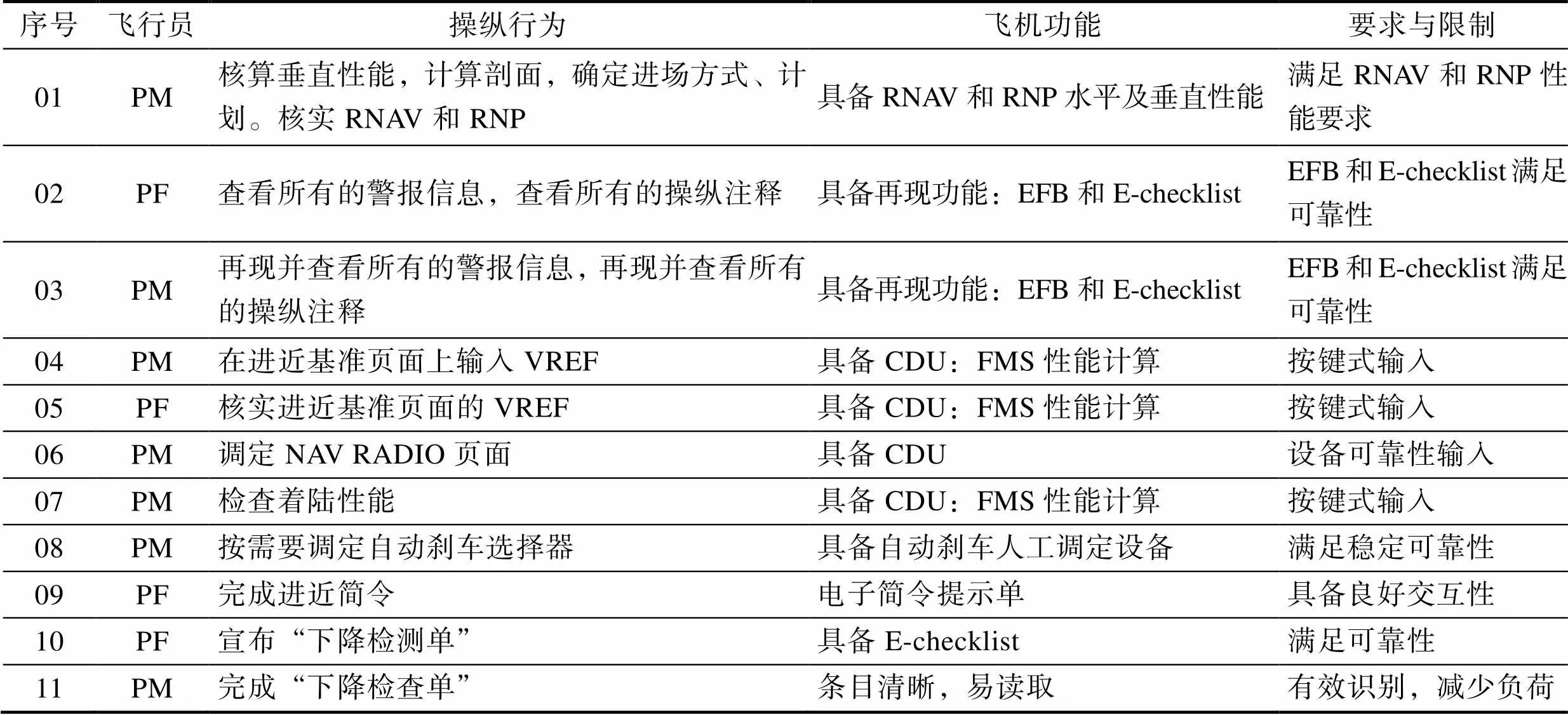
民机进近着陆时下降场景捕获的第2步为:根据第1步确定的着陆场景节点,确定着陆场景下的飞行员操纵行为任务,并根据具体的操纵任务分析飞机的功能和飞机的要求与限制,见表6。
表6 着陆场景描述

Tab.6 Landing scene description
4 结语
对民机进近着陆任务下的飞行操纵人机交互场景捕获模型进行了验证分析,并以民机进近着陆任务中的下降和着陆2个典型子任务场景为实例进行了场景捕获模型应用验证。通过民机进近着陆操纵场景的任务划分、维度设计、节点确定,厘清了场景内涵及层次任务,建立了场景捕获模型。飞行操纵人机交互适航场景捕获指根据人机环配置参数再现民机人机交互过程中可能出现的各种场景,可以使民机设计制造在预定环境下实现相应的功能需求,为适航符合性验证提供基础证据,为民机进场和着陆安全分析和民机正向设计提供了参考。民机飞行进近着陆场景描述可为人机界面设计、人机交互信息编译传递、民机工效评估、防错容错性设计、机组工作量评估、适航验证与审定等研究提供帮助。
后续会将民机进近着陆飞行操纵场景模型应用于基于循证训练的民机运行飞行员进近着陆操纵行为安全风险分析与预测研究中。此外,通过民机进近着陆人机交互场景捕获模型的应用与完善,成果将应用于基于正向的民机设计与制造研究中。
[1] 杨春生, 孟昭荣. 危险的11分钟-第四集世界航空安全与事故分析[M]. 北京: 中国民航出版社, 2000.
YANG Chun-sheng, MENG Zhao-rong. 11 Minutes of Danger-episode 4: Analysis of World Aviation Safety and Accidents PartNo: Episode 4[M]. Beijing: China Civil Aviation Press, 2000.
[2] 李福海, 谢孜楠. 我国民机进近着陆阶段飞行事故及事故征候规律分析与预防措施研究[J]. 中国民航飞行学院学报, 2008, 19(4): 3-7.
LI Fu-hai, XIE Zi-nan. Analysis of Flight Accidents and Accident Signs of China's Civil Aircraft during the Approaching and Landing Phase and Research on Preventive Measures[J]. Journal of Civil Aviation Flight University of China, 2008, 19(4): 3-7.
[3] 王海燕, 卞婷, 薛澄岐. 基于眼动跟踪的战斗机显示界面布局的实验评估[J]. 电子机械工程, 2011, 27(6): 50-53.
WANG Hai-yan, BIAN Ting, XUE Cheng-qi. Experimental Evaluation of Fighter's Interface Layout Based on Eye Tracking[J]. Electro-Mechanical Engineering, 2011, 27(6): 50-53.
[4] 王晴昊, 胡剑波, 姚登凯. STPA在进近着陆飞行安全分析中的研究及应用[J]. 系统工程理论与实践, 2018, 38(10): 2703-2712.
WANG Qing-hao, HU Jian-bo, YAO Deng-kai. Research and Application of STPA to Flight Safety Analysis in Approach and Landing[J]. Systems Engineering-Theory & Practice, 2018, 38(10): 2703-2712.
[5] 周长春, 胡栋栋. 基于灰色聚类方法的航空公司飞机进近着陆阶段安全性评估[J]. 中国安全生产科学技术, 2012, 8(7): 99-102.
ZHOU Chang-chun, HU Dong-dong. Safety Assessment of Aircraft during Approach-Landing Stage Based on Grey Clustering Method[J]. Journal of Safety Science and Technology, 2012, 8(7): 99-102.
[6] 梅芊, 黄丹, 卢艺. 基于MBSE的民用飞机功能架构设计方法[J]. 北京航空航天大学学报, 2019, 45(5): 1042-1051.
MEI Qian, HUANG Dan, LU Yi. Design Method of Civil Aircraft Functional Architecture Based on MBSE[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 1042-1051.
[7] KLUEVER C A. Unpowered Approach and Landing Guidance with Normal Acceleration Limitations[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 882-885.
[8] 王涛, 傅山, 黄丹, 等. 基于深度图的驾驶舱内飞行员动作识别[J]. 电光与控制, 2017, 24(12): 90-94.
WANG Tao, FU Shan, HUANG Dan, et al. Pilot Action Identification in the Cockpit[J]. Electronics Optics & Control, 2017, 24(12): 90-94.
[9] 汪磊, 蒋引, 谭维. 航线飞行员风险画像指标体系构建[J]. 中国安全科学学报, 2020, 30(11): 13-21.
WANG Lei, JIANG Yin, TAN Wei. Study on Construction of Risk Portrait Index System for Airline Pilots[J]. China Safety Science Journal, 2020, 30(11): 13-21.
[10] 毛忠明, 顾宏斌, 吴东苏. 基于ANFIS的进近阶段飞行员操纵模型设计[J]. 数字技术与应用, 2019, 37(1): 168-171.
MAO Zhong-ming, GU Hong-bin, WU Dong-su. Design of Pilot Control Model in Approach Phase Based on ANFIS[J]. Digital Technology & Application, 2019, 37(1): 168-171.
[11] FU Li, ZHANG Jun, LI Rui, et al. Vision-Aided RAIM: A New Method for GPS Integrity Monitoring in Approach and Landing Phase[J]. Sensors (Basel, Switzerland), 2015, 15(9): 22854-22873.
[12] 刘树强, 孙有朝. 基于BP网络的机组工作量评估方法研究[J]. 飞机设计, 2014, 34(2): 63-66.
LIU Shu-qiang, SUN You-chao. Research on Crew Workload Base on BP Neural Network[J]. Aircraft Design, 2014, 34(2): 63-66.
[13] 丁熊, 白雪晶. 基于场景构建的生鲜农产品新零售服务创新与设计研究[J]. 包装工程, 2019, 40(16): 92-100.
DING Xiong, BAI Xue-jing. Innovation and Design of New Retail Service for Fresh Agricultural Products Based on Scenario Construction[J]. Packaging Engineering, 2019, 40(16): 92-100.
[14] 姜海洋, 梅云, 顾宪松. 场景化交互设计理论的分析与研究[J]. 包装工程, 2019, 40(18): 269-275.
JIANG Hai-yang, MEI Yun, GU Xian-song. Analysis and Research on Theory of Scene Interaction Design[J]. Packaging Engineering, 2019, 40(18): 269-275.
[15] 罗伯特·斯考伯, 谢尔·伊斯雷尔. 即将到来的场景时代大数据、移动设备、社交媒体、传感器、定位系统如何改变商业和生活[M]. 赵乾坤, 周宝曜, 译. 北京: 北京联合出版公司, 2014.
ROBERT S, SHERE I. How Big Data, Mobile Devices, Social Media, Sensors and Positioning Systems Will Change Business and Life in the Coming Scene Era[M]. ZHAO Qian-kun, ZHOU Bao-yao Translated. Beijing: Beijing United Publishing Company, 2014
[16] 徐敏敏, 揭裕文. 面向适航审定的飞行场景研究[J]. 民用飞机设计与研究, 2014(2): 66-69.
XU Min-min, JIE Yu-wen. Research of Airworthiness Certification Oriented Scenario[J]. Civil Aircraft Design & Research, 2014(2): 66-69.
[17] 梁恺文, 李焱林. 基于用户场景的交互设计流程研究[J]. 包装工程, 2018, 39(16): 197-201.
LIANG Kai-wen, LI Yan-lin. Interaction Design Flow Based on User Scenario[J]. Packaging Engineering, 2018, 39(16): 197-201.
[18] CAMPEAU A G. The Space-Control Theory of Paramedic Scene-Management[J]. Symbolic Interaction, 2008, 31(3): 285-302.
[19] 冯力飞, 陈桥, 曾小舟. 民用飞机运行环境适应性影响因素研究[J]. 中国民航飞行学院学报, 2016, 27(6): 64-67.
FENG Li-fei, CHEN Qiao, ZENG Xiao-zhou. Research on Influencing Factors of Operation Environmental Adaptability for Civil Aircraft[J]. Journal of Civil Aviation Flight University of China, 2016, 27(6): 64-67.
Construction of Human-Computer Interactive Airworthiness Scene Capture Model for Civil Aircraft Approach and Landing Flight Control
CHEN Nong-tian, MAN Yong-zheng, LI Jun-hui
(Civil Aviation Flight College of China, Sichuan Guanghan 618307, China)
This paper aims to construct a model for capturing pilot manipulation man-machine interaction scenes and provide a reference for approach and landing safety analysis and civil aircraft positive design. Firstly, the basic connotation and hierarchical tasks of scene capture are clarified. Secondly the human-computer interaction scenario capture model and implementation program are established through the division of civil aircraft approach and landing maneuvering scene tasks, scene dimension design, scene node determination, and scene content description. Finally, through such typical sub-task scenarios as descent and landing in civil aircraft approach and landing, it implements the verification and application of civil aircraft approach and landing flight control man-machine interaction scene capture examples.The pilot manipulation man-machine interaction scene model is captured successfully. Aiming at the pilot manipulation man-machine interaction scene during approach and landing, a model of pilot manipulation man-machine interaction scene is proposed, the pilot manipulation scene tasks and implementation steps are established, and the division nodes of the pilot manipulation scenes and the description of the scene content are given, which provides a theoretical basis for the approach and landing safety analysis and positive design and manufacture of civil aircraft.
approach and landing; scene model; scene capture; human-computer interaction; civil aircraft design
TB472
A
1001-3563(2022)12-0113-06
10.19554/j.cnki.1001-3563.2022.12.012
2022–01–24
陈农田(1984—),男,博士生,副教授,主要研究方向为航空安全与适航技术、人机环境系统工程、通用航空技术。
责任编辑:马梦遥
猜你喜欢
军事文摘(2022年19期)2022-10-18
当代陕西(2022年4期)2022-04-19
当代陕西(2020年22期)2021-01-18
当代陕西(2020年17期)2020-10-28
中华诗词(2019年7期)2019-11-25
意林·全彩Color(2019年4期)2019-05-11
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2015年25期)2015-09-01