基于眼动跟踪实验与VR仿真的农业机器人造型设计
2022-07-04 03:11常瑜田园尹项迎
包装工程 2022年12期
常瑜,田园,尹项迎
基于眼动跟踪实验与VR仿真的农业机器人造型设计
常瑜1,田园2,尹项迎1
(1.天津商业大学,天津 300134;2.北华航天工业学院,河北 廊坊 065000)
为促进农业智能化发展,进一步丰富农业机械的用户感性意象,解决农业机器人造型设计同质化问题。结合眼动跟踪实验与VR仿真技术,提出一种农业机器人造型设计方法。第一,确定样本及初步感性意象,进行感性意象的权重分析与筛选。第二,运用眼动跟踪设计样本进行造型特征点分析,主要依据热点区域确定关键造型要素。第三,依据意象权重分析、眼动实验结果等进行针对性的造型意象创新,形成方案集并完成计算机辅助设计。最后,通过熵权理论和VR仿真技术的介入完成综合设计评价,获得最优解。以苹果采摘机器人造型设计为例,根据分析可知,在农业机器人造型设计中运用眼动跟踪技术与VR仿真评价,可以较为准确地依据用户感性意象需求进行造型设计创新,提高设计效率,其方法具有一定的适用性。
产品设计;采摘机器人;眼动跟踪实验;VR仿真;设计评价
党的十九大报告明确指出,实施乡村振兴战略,要坚持农业农村优先发展,按照产业兴旺、生态宜居、乡风文明、治理有效、生活富裕的总要求,加快推进农业农村现代化。农业现代化需要依靠物联网、大数据以及人工智能等关键性技术,其中农业机器人是技术整合的主要代表,已经得到广泛关注。
1 研究现状
人工智能和大数据技术在农业领域的不断普及,为现代农业带来了革命性的技术创新[1],肩负着推动农业现代化进程、推进农业结构调整的多重使命[2]。其中,农业机器人将智能设备和先进技术集于一体,是农业机械的高级形式[3],在提高农业劳动生产率,改善农业生产作业条件,实现农业规模化、精准化生产等方面具有较大的应用潜力[4]。目前,针对农业机器人的研究,主要集中在数据界面、控制系统、机械结构等方面,如界面影响因素[5]、路径规划[6]、功能结构技术[7-8]。但值得注意的是,随着农机技术的日趋完善,用户将开始注重相关产品在使用者感性层面产生的作用。此外,农机产品造型还应契合多样化的功能需求,进行更为丰富的创新设计实践。由此可见,造型设计是农业机器人发展过程中的关键性问题。
在产品开发过程中,设计评价能够为方案的改进和优化提供参考依据。随着学科间的融合发展及相关理论的完善,设计评价的方法也呈现出多样化的特点,并由主观的定性评价发展为客观的综合性评价[9]。国内农机装备评价也呈现出较多层次的研究,如利用模糊综合评价法完成了对产品零件关联度的综合评判[10];从产品发展进化角度进行了农机装备生命周期人机设计评价研究[11];基于农户调研数据对农机装备质量进行了评价研究等[12]。可以看出,针对农业机器人造型方面的设计评价较少。同时,有学者指出,为应对需求的发展,未来必将研究出更多种类的农业机器人,使其生产效率更高[13]。因此,当前开展包含执行器、车身、行走装置等在内的农业机器人整体造型设计也很有必要。
眼动追踪技术作为生理唤醒量的反馈,在心理学、医学等领域已有了广泛的运用。根据视觉轨迹判断消费者的心理状态已成为产品设计领域研究的热点[14]。如今,越来越多的研究人员将眼动实验数据运用于产品决策中,例如智能交互领域[15]、用户体验评测[16]、产品外观设计[17]。同时,虚拟现实和视景仿真的发展,促进了VR技术等仿真分析方法运用于产品感性工学研究中,如运用VR交互技术建立产品设计评价系统、解决产品设计沟通障碍[18]等。值得注意的是,在造型设计阶段,眼动跟踪实验作为造型关键性特征提取的设计手段,能够基于用户注视点数据提高创新设计分析的客观性,但对整体造型设计评价而言,用户较为被动,主要依靠实验者提供的产品设计图片或视频演示进行评价,不够直观。在评价阶段,引入VR仿真分析手段,能够帮助用户全面、主动地在虚拟场景中查看造型设计及细节,给出更为可靠的评价。因此,在创新设计阶段应用眼动追踪技术,在评价阶段引入VR仿真技术,可不断推进、完善农业机器人造型设计及评价,并带来新的研究方法。
综上所述,农业机器人造型设计在农业机械化发展进程中不可或缺,而目前在造型设计方面的研究较少。基于此,本文将开展农业机器人造型设计评价研究,具体通过眼动跟踪技术和VR仿真技术相结合,提取农业机器人造型特征点和数据,进行设计方案的评价和筛选,以获取符合用户感性意象的造型设计,提高设计评价效率,为农业机器人造型的设计创新提供技术支撑。
2 设计流程的建立
2.1 分析流程
参考具体的农业机器人类型及功能需求,构建针对性的造型创新设计分析流程,见图1。
1)基于专业的用户和设计调研,完成典型实例、用户感性意象词汇的筛选。
2)结合实例,进行眼动跟踪实验设计和热点区域分析,以此形成关键造型要素的选择依据。
3)参考造型要素与用户意象的选择、分析,完成创新设计方案集并生成计算机辅助三维模型。
4)利用方案集依次构建VR仿真场景,结合VR设备进行用户评价法分析,对评价结果进行量化处理,获取最优解。

图1 分析流程
2.2 设计样本的确定与意象分析
1)设计样本的筛选。首先,在互联网、专业期刊、报纸等范围内搜集关联性较强的初始样本。其次,采用焦点小组法(专家介入)对初始样本进行讨论、提炼,获得典型的样本,以用于实验和评价。值得注意的是,为提高筛选过程的准确性,可对初始样本进行必要的图像修正(去掉品牌、色彩、背景等),最终得到设计样本的集合。
2)采用词汇收集法和聚类分析法进行用户感性意象词汇的提取。具体而言,造型意象用语义来表达,语义的获取依赖用户调研与分析,过程包含语义词汇的收集、分析和归纳3个阶段,最终得到样本造型意象集(即典型意象词汇)。
3)意象词汇的权重计算分析。这一阶段依靠专家打分进行计算分析,具体使用Likert五级制(1—5分)进行赋值,同时要将结果进行归一化处理,形成权重判断,获取目标意象。
2.3 眼动实验设计
在设计流程第2阶段引入眼动跟踪实验,目的在于捕捉设计样本整体造型中用户注视的热点区域,着力于这些热点区域的分析将成为造型创新设计的关键。该过程是通过眼动实验设备完成的,可提高关键造型设计要素提取过程的客观性。眼动实验的对象为经过视力筛查的用户,设备上采用TobiiproX3-120便携式桌面眼动仪、专业显示屏和软件ErgoLAB,并进行合理的实验设定。
1)实验准备。设定一名主持人,向被试者讲解实验注意事项并进行眼动仪校准,保证实验过程完整、有效。
2)实验过程。被试者调整坐姿后,面向显示屏浏览相关设计样本图片,由主持人控制软件,并将显示屏切换为黑屏,时长30 s,以此保证被试者眼脑有放松的时间。
3)切换为新的设计样本让被试者浏览,直至完成所有的设计样本。最终,形成造型热点区域,提供关键造型要素的选择依据。
2.4 VR仿真与设计评价
在设计流程的最后是设计评价,眼动跟踪实验的引入是为了通过捕捉用户的注视热点形成关键造型设计要素,由创新设计思考后所形成的方案集,仍需通过设计评价来完成最优方案的筛选。在这一阶段,VR虚拟仿真的引入,可取代传统的观看设计方案图片进行评价的方式,为参与方案筛选评价的用户提供沉浸式、全景式的设计方案展示场景,以提高评价的准确性。同时,在用户评价完成后,运用熵权理论相关方法处理用户的评价分值,也增强了最优方案筛选的可靠性。
下面将基于Twinmotion软件搭建VR仿真场景,设计评价过程的具体实现方式如下:
1)采用Twinmotion软件构建造型设计场景模型并生成仿真可执行的程序,并以此作为VR实验场景,Twinmotion软件设计场景见图2。
2)仿真实验。选取HTC-VIVE作为VR设备,由实验人员操作软件来实现不同方案场景的切换,用Twinmotion建立不同的计算机辅助农业机器人造型创新设计方案VR虚拟场景,使参与实验的用户通过设备进入其中,并依据典型意象词汇进行主观评价,评价采用5级量表,1—5分代表不同的感受程度。


图2 Twinmotion软件设计场景
(2)

3 苹果采摘机器人造型设计实例
依据上文所述的设计流程,以苹果采摘机器人造型设计为例进行设计分析与验证,主要包括用户意象分析、关键造型要素的眼动实验,以及创新设计方案评价。
3.1 用户意象确立
用户意象通过意象词汇进行语义表达,本次实验结合农业采摘机器人作业场景(矮砧密植集约栽培方式)进行了词汇的收集和整理;然后,选取25名用户参与到苹果采摘机器人造型设计的感性意象分析过程中,参与本次实验的用户选定为与产品造型设计相关的设计学类专业教师、学生以及从事农业机器人开发的从业者等,能够为农机造型设计提供较为专业的分析数据,具体包含15名高校产品设计专业师生、10名农业科学研究从业者,完成了词汇的归纳,形成了针对苹果采摘机器人造型设计的用户典型意象词汇——“可靠的、未来的、易用的、简洁的”。筛选过程见图3,首先基于互联网、书籍、文献等展开调研,检索与农业机器人相关的描述词汇,完成农业机器人造型初始意象词汇的收集;其次,与上述选定的、具备一定农业机器人设计专业知识和研发经验的专业用户进行设计访谈,结合农业机器人造型特征对初始意象进行筛选分析,最终形成符合设计目标的典型意象词汇。
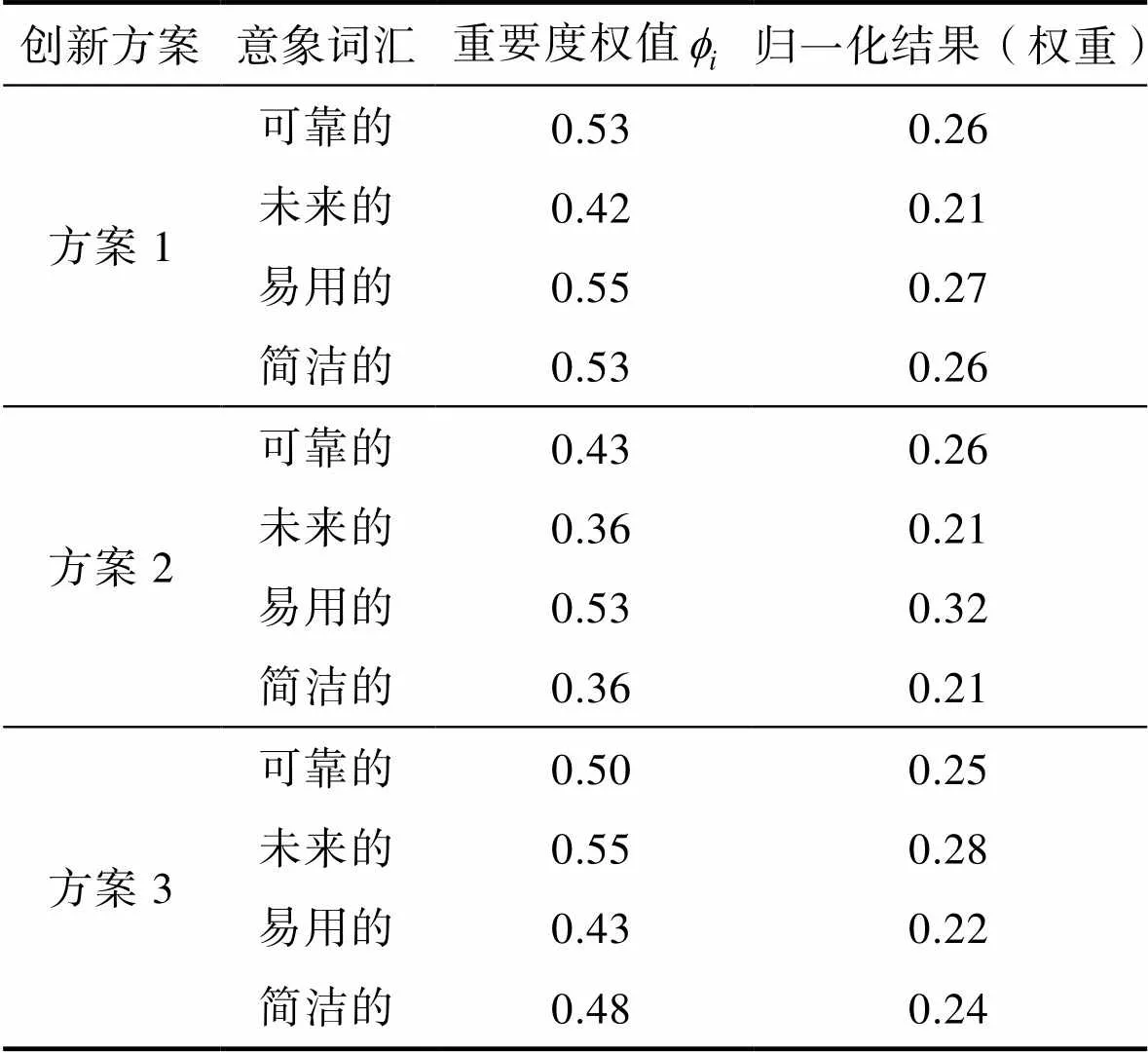
意象词汇的权重分析。为提高评价的可靠性,在参与意象词汇筛选的25名用户中选取具有5年以上农机设计或工业设计及评价相关科研经历的从业人员作为评价意象词汇的专家(共5名),对4个典型意象词汇进行打分,结果分析见表1,可以看出,“可靠的”意象权重最高,但因权重值之间的差距较小,在具体的造型设计过程中也要兼顾“易用的”“未来的”和“简洁的”意象。

图3 用户意象筛选过程
表1 典型意象词汇权重分析

Tab.1 Analysis on the weight of typical image words
3.2 眼动实验分析及关键造型要素确立
基于上文所述的流程分析,将结合眼动实验对采摘机器人的造型关键要素进行提取。
1)设计样本筛选。采摘机器人是目前国内农业机器人研究的重点领域[13],因此,通过多个渠道收集此类农业机器人造型设计案例,并结合相关专业领域的专家建议,对样本进行筛选,形成本次实践的设计样本集合,包含草莓采摘机器人、番茄采摘机器人、甜椒采摘机器人、果实分拣机器人、收割机器人等典型的采收机器人,共计7个样本,均具备典型的行走装置、机身、执行器等关键造型特征,有利于开展本次具有针对性的采摘机器人造型研究。
2)进行眼动跟踪实验并完成关键造型要素的提取。具体而言,对7个设计样本的图片进行处理后导入ErgoLAB软件,选取参与意象词汇筛选的15名用户继续参与眼动跟踪实验,实验过程见图4。最后形成7个设计样本的眼动跟踪注视点图,见图5。
实验中,注视点可表明用户关注强弱的变化,软件将注视点集中的特征区域定义为热点,关注程度由弱到强用绿色、黄色、红色标注。基于7个农业采摘机器人造型眼动跟踪试验的结果,可得出:
1)在设计样本中,主体包覆件、机械臂的关注度较高,能够作为主要造型要素,凸显造型意象并提高识别度。此外,轮胎也吸引了用户的一部分关注度,应当作为辅助造型要素进行分析。
2)在部分设计样本中与造型无关的结构件、线缆等也获得了较多的视觉注视,但本身并未提供积极的造型意象,在创新设计中应注意要弱化非造型的重要特征,使采摘机器人造型更符合用户意象。因此,通过实验可将面向农业采摘机器人的造型要素定义为“主体包覆件”“机械臂”和“车轮”,并重点进行“主体包覆件”和“机械臂”的设计。
3.3 创新方案集生成及筛选评价
依据上文的分析,将面向“可靠的”用户意象,进行具体的苹果采摘机器人造型设计,主要对机器人主体包覆件、机械臂和车轮进行造型解析和创新,驱动完成创新设计方案集,本次实践共形成了3个创新方案,见图6。
运用Twinmotion软件形成3个VR场景(见图7)。邀请参与眼动实验的15名用户进入VR场景体验,实验场景见图8。依据2.4小节所述方法完成评价,并结合2.4小节中的式(1)—(3),形成各创新方案初步面向意象词汇的评价结果,见表2。
最后,进行权重拟合,3个方案的评价权重分别为0.248 6(方案1)、0.251 6(方案2)和0.244 2(方案3),方案2以较小的优势成为最优解,经过深化设计后的效果见图9。

图4 眼动跟踪实验过程

图5 设计样本眼动跟踪实验热点图
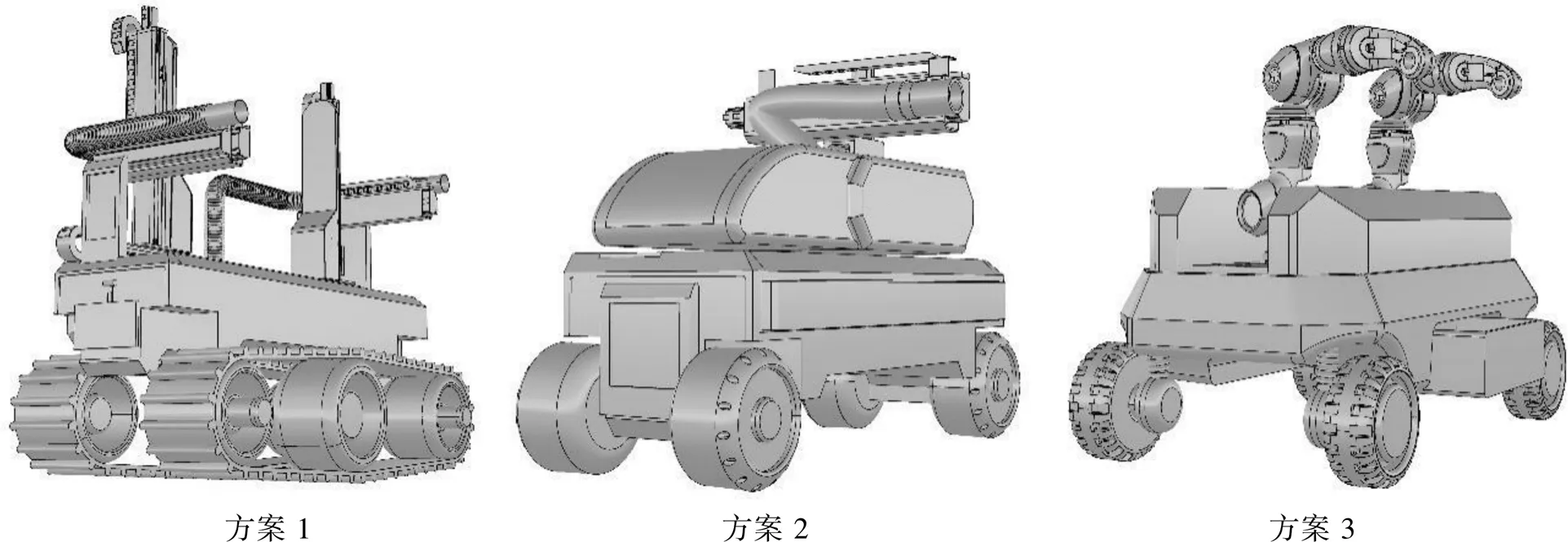
图6 创新方案集

图7 VR场景示意

图8 VR实验过程示意
表2 各创新方案初步的评价结果
Tab.2 Preliminary evaluation results of each innovation scheme

4 结语
在农业机器人造型设计研究中,结合眼动跟踪实验与VR仿真技术,完成了典型意象词汇、关键设计要素的权重分析,并基于VR仿真实验和熵权理论完成了设计评价,形成了易于操作的创新设计和评价流程,主要结论如下:
1)运用眼动跟踪实验完成了关键造型要素的提取,即通过用户完成初始设计样本的选择;再结合眼动跟踪实验进行了造型热点区域的分析,完成了关键造型要素的提取,为进一步的创新设计分析提供了较为科学的设计依据。
2)运用计算机辅助VR场景的构建,以此完成创新设计方案集的设计评价,同时结合熵权理论进行分析,完成量化评价,并筛选出最优方案,通过采摘机器人的设计实践能够体现流程的可行性。然而,运用Twinmotion构建的产品设计仿真VR场景中,产品的材质、色彩等与常用的产品设计渲染软件效果相比会失真,在一定程度上会影响用户的评价,在今后的研究中应着力提高VR场景的渲染效果。文中主要通过眼动跟踪实验和VR技术的导入进行创新设计流程的探索,并依据专业用户完成采摘机器人的创新设计与评价筛选。在今后的研究中应继续完善用户筛选机制,并采用多样化的评价方法,以提高评价的科学性和客观性。
[1] 陈桂芬, 李静, 陈航, 等. 大数据时代人工智能技术在农业领域的研究进展[J]. 吉林农业大学学报, 2018, 40(4): 502-510.
CHEN Gui-fen, LI Jing, CHEN Hang, et al. A Survey of Researches on Artificial Intelligence in the Field of Agriculture in Big Data Era[J]. Journal of Jilin Agricultural University, 2018, 40(4): 502-510.
[2] 刘宏笪, 张济建, 张茜. 我国“智慧农业”研究态势与发展展望[J]. 黑龙江畜牧兽医, 2019(10): 6-11, 175.
LIU Hong-da, ZHANG Ji-jian, ZHANG Xi. The Research Situation and Development Prospect of "Intelligent Agriculture" in China[J]. Heilongjiang Animal Science and Veterinary Medicine, 2019(10): 6-11, 175.
[3] 李乐, 刘玉倩. 基于大数据的农业智能机器人开发[J]. 农机化研究, 2019, 41(11): 221-224.
LI Le, LIU Yu-qian. Development of Agricultural Intelligent Robot Based on Big Data[J]. Journal of Agricultural Mechanization Research, 2019, 41(11): 221-224.
[4] 闫全涛, 李丽霞, 邱权, 等. 小型移动式农业机器人研究现状及发展趋势[J]. 中国农机化学报, 2019, 40(5): 178-186.
YAN Quan-tao, LI Li-xia, QIU Quan, et al. Research Status and Development Trends of Small-Mobile Agricultural Robots[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(5): 178-186.
[5] 王华斌, 张阳阳. 农机界面设计影响因素的分析[J]. 包装工程, 2019, 40(18): 159-165.
WANG Hua-bin, ZHANG Yang-yang. Influencing Factors of Agricultural Machine Interface Design[J]. Packaging Engineering, 2019, 40(18): 159-165.
[6] 朱雯曦. 大数据在农业机器人路径规划实时同步定位中的应用[J]. 农机化研究, 2020, 42(3): 198-202.
ZHU Wen-xi. Application of Big Data in Real Time Synchronous Positioning and Path Planning of Agricultural Robot[J]. Journal of Agricultural Mechanization Research, 2020, 42(3): 198-202.
[7] 刘继展. 温室采摘机器人技术研究进展分析[J]. 农业机械学报, 2017, 48(12): 1-18.
LIU Ji-zhan. Research Progress Analysis of Robotic Harvesting Technologies in Greenhouse[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 1-18.
[8] 王宝梁, 索明何, 刘大诚. 基于开放式结构的多功能农业机器人设计[J]. 中国农机化学报, 2019, 40(3): 179-184.
WANG Bao-liang, SUO Ming-he, LIU Da-cheng. Design of a Multifunctional Agricultural Robot[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 179-184.
[9] 刘征, 王昀. 基于知识计量的产品设计调研方法[J]. 计算机集成制造系统, 2020, 26(10): 2690-2702.
LIU Zheng, WANG Yun. Survey Method of Product Design Based on Knowledge Measurement[J]. Computer Integrated Manufacturing Systems, 2020, 26(10): 2690-2702.
[10] 罗石林, 何苗, 李建尧, 等. 基于模糊综合评价法的农机零件关联度计算及模块划分[J]. 中国农业科技导报, 2019, 21(2): 71-81.
LUO Shi-lin, HE Miao, LI Jian-yao, et al. Fuzzy Comprehensive Evaluation Method Calculation of Correlation Degree and Module Division of Agricultural Machinery Parts[J]. Journal of Agricultural Science and Technology, 2019, 21(2): 71-81.
[11] 邱变变, 周骥平, 郑再象, 等. 农机装备生命周期人机设计评价指标体系研究[J]. 机械设计与制造, 2018(12): 230-233.
QIU Bian-bian, ZHOU Ji-ping, ZHENG Zai-xiang, et al. Study on Lifecycle Ergonomic Evaluation Index System for Agricultural Equipment[J]. Machinery Design & Manufacture, 2018(12): 230-233.
[12] 周晶, 青平. 国产农机装备质量评价研究——基于华中地区农户调查数据的分析[J]. 中国工程科学, 2019, 21(5): 60-66.
ZHOU Jing, QING Ping. Study on Quality Evaluation of Domestic Agricultural Machinery Equipment: An AnalysisBased on the Farmer Survey Data from Central China[J]. Strategic Study of CAE, 2019, 21(5): 60-66.
[13] 赵静娟, 郑怀国, 董瑜, 等. 全球农业机器人研发趋势预测及对我国的启示[J]. 中国农机化学报, 2021, 42(4): 157-162.
ZHAO Jing-juan, ZHENG Huai-guo, DONG Yu, et al. Forecast Research and Development Trend of International Agricultural Robot and Its Suitability to China[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(4): 157-162.
[14] 苏建宁, 邱凯, 张书涛, 等. 基于眼动数据的产品造型设计要素评价方法研究[J]. 机械设计, 2017, 34(10): 124-128.
SU Jian-ning, QIU Kai, ZHANG Shu-tao, et al. Evaluation Method Study of Product Modeling Design Elements Based on Eye Movement Data[J]. Journal of Machine Design, 2017, 34(10): 124-128.
[15] 郜东瑞, 汪润桂, 应少飞, 等. 基于眼动信号的便携式无线智能交互系统设计[J]. 中国生物医学工程学报, 2019, 38(5): 573-580.
GAO Dong-rui, WANG Run-gui, YING Shao-fei, et al. Design of Portable Wireless Intelligent Interactive System Based on Eye Movement Signal[J]. Chinese Journal of Biomedical Engineering, 2019, 38(5): 573-580.
[16] 卢国英, 侯冠华. 基于眼动追踪的工程车辆造型设计用户体验预测模型[J]. 机械设计, 2017, 34(8): 107-111.
LU Guo-ying, HOU Guan-hua. Predictive Model of User Experience of Engineering Vehicle Modeling Design Based on Eye Tracking[J]. Journal of Machine Design, 2017, 34(8): 107-111.
[17] 王金军, 方灏. 基于眼动的内饰造型特征认知与品牌识别研究[J]. 包装工程, 2020, 41(22): 53-59.
WANG Jin-jun, FANG Hao. Cognition of Interior Styling Feature and Brand Recognition Based on Eye Tracking[J]. Packaging Engineering, 2020, 41(22): 53-59.
[18] 张敏, 黄华. VR交互技术下的产品设计评价系统研究[J]. 现代电子技术, 2019, 42(19): 173-177.
ZHANG Min, HUANG Hua. Research on Product Design Evaluation System Based on Virtual Reality Interaction Technology[J]. Modern Electronics Technique, 2019, 42(19): 173-177.
Modeling Design of Agricultural Robot Based on Eye Tracking Experiment and VR Simulation
CHANG Yu1, TIAN Yuan2, YIN Xiang-ying1
(1.Tianjin University of Commerce, Tianjin 300134, China; 2.North China Institute of Aerospace Engineering, Heibei Langfang 065000, China)
This paper aims to promote the development of agricultural intelligence, further enrich the perceptual image of agricultural machinery users, and solve the problem of homogeneity of agricultural robot modeling design. Combining the eye tracking experiment and VR simulation, a modeling design method of agricultural robot is proposed. Firstly, this paper determines the sample and preliminary perceptual image, and conducts the weight analysis and screening of perceptual image. Secondly, it uses the eye tracking experiment to analyze the modeling feature points, and mainly determines the key modeling elements based on the hot spots. Thirdly, according to the image weight analysis and eye movement experiment results, it carries on the targeted modeling image innovation, forms the scheme set and completes the computer-aided design. Finally, it uses entropy weight theory and VR simulation technology to complete the comprehensive design evaluation and obtain the optimal solution. Taking the shape design of apple picking robot as an example, the analysis shows that the application of eye tracking technology and VR simulation evaluation in the shape design of agricultural robot can more accurately innovate the shape design according to the user's perceptual image demands, and improve the design efficiency. In a nutshell, the method has certain applicability.
product design; picking robot; eye tracking experiment; VR simulation; design evaluation
TB472
A
1001-3563(2022)12-0119-07
10.19554/j.cnki.1001-3563.2022.12.013
2022–01–25
天津市哲学社会科学规划课题重点项目(TJSR20-010);天津商业大学教学改革项目(TJCUJG202063)
常瑜(1986—),男,硕士,副教授,主要研究方向为产品设计。
尹项迎(1991—),女,硕士,讲师,主要研究方向为产品创新设计。
责任编辑:马梦遥
猜你喜欢
名作欣赏·学术版(2022年5期)2022-05-12
青年文学家(2022年9期)2022-04-23
汽车实用技术(2022年7期)2022-04-20
载人航天(2021年5期)2021-11-20
大自然探索(2019年7期)2019-12-13
中华诗词(2018年9期)2019-01-19
中华诗词(2018年1期)2018-06-26
中学生数理化·高一版(2017年2期)2017-04-25
数学学习与研究(2017年3期)2017-03-09
计算技术与自动化(2014年1期)2014-12-12