
黄展鹏:探析丛式井侧钻绕障水平井优化设计方法
2022-07-07 04:00黄展鹏
科技研究·理论版 2022年11期
关键词:优化设计
黄展鹏
摘要:为促进油田采收率的提升,应用丛式井井网加密技术的效果显著。为对钻井成本进行缩减,应用老井,开展开窗侧钻的形式已经成为应用普遍程度较高的一种形式。在侧钻水平井数量不断增加的情况下,绕障井的设计难度也不断提升。分析绕障井设计中存在的问题,对二维定向井及直井的障碍模型进行研究,分析侧钻绕障井和二维三维绕障井的设计形式,传统的绕障井设计中,一般情况下先开展水平投影图的设计,进而进行垂直剖面图的设计,最后校核曲率,设计计算的过程繁琐程度较高,必须开展反复性的试算校核干预,但是其并不能确保设计的轨道为最优化的管道,所以本文就丛式井侧钻绕障水平井优化设计方式展开论述分析。
关键词:丛式井;侧钻绕障水平井;优化设计
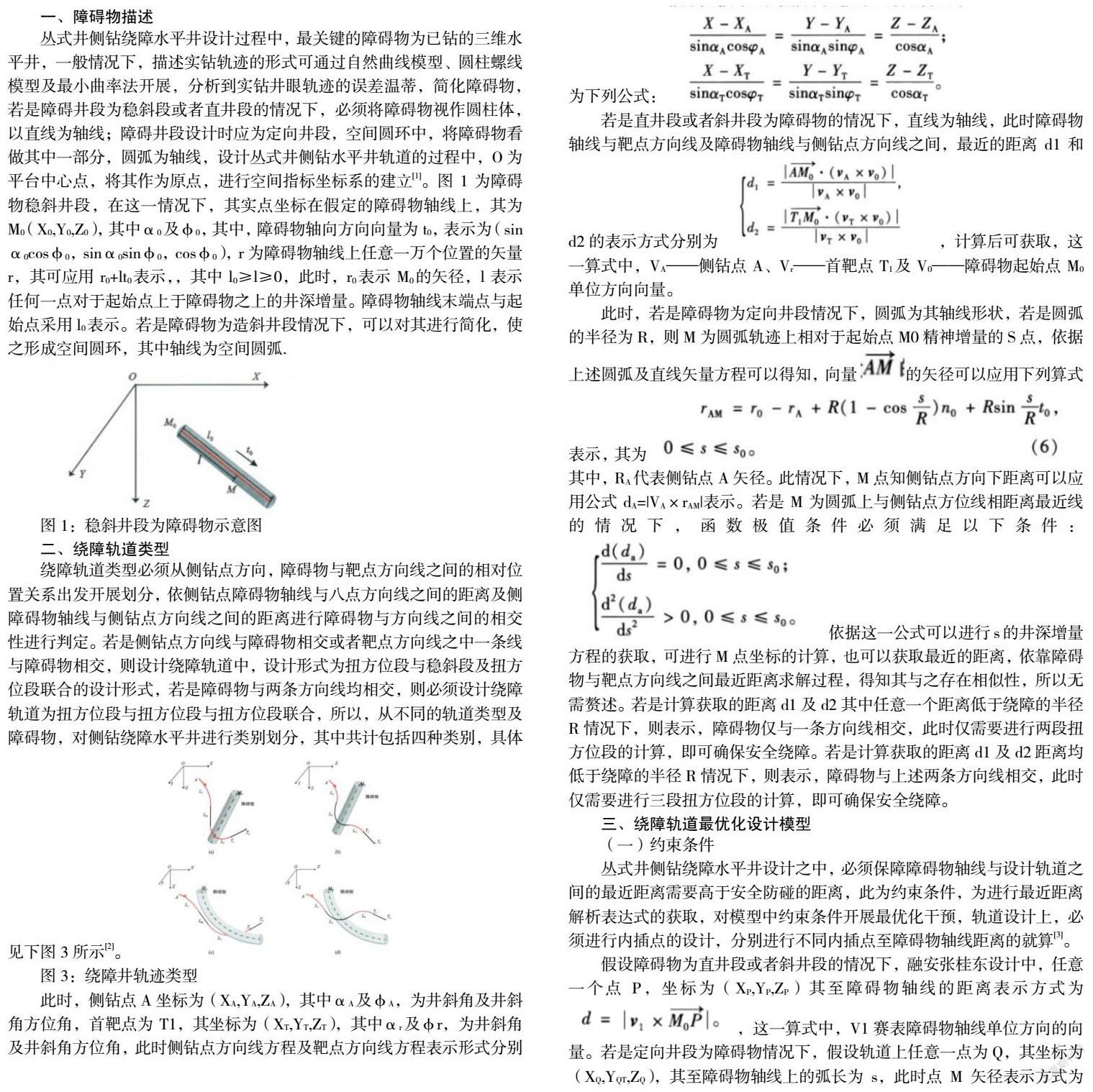
一、障碍物描述
丛式井侧钻绕障水平井设计过程中,最关键的障碍物为已钻的三维水平井,一般情况下,描述实钻轨迹的形式可通过自然曲线模型、圆柱螺线模型及最小曲率法开展,分析到实钻井眼轨迹的误差温蒂,简化障碍物,若是障碍井段为稳斜段或者直井段的情况下,必须将障碍物视作圆柱体,以直线为轴线;障碍井段设计时应为定向井段,空间圆环中,将障碍物看做其中一部分,圆弧为轴线,设计丛式井侧钻水平井轨道的过程中,O为平台中心点,将其作为原点,进行空间指标坐标系的建立[1]。图1为障碍物稳斜井段,在这一情况下,其实点坐标在假定的障碍物轴线上,其为M0(X0,Y0,Z0),其中α0及φ0,其中,障碍物轴向方向向量为t0,表示为(sinα0cosφ0,sinα0sinφ0,cosφ0),r为障碍物轴线上任意一万个位置的矢量r,其可应用r0+lt0表示,,其中l0≥l≥0,此时,r0表示M0的矢径,l表示任何一点对于起始点上于障碍物之上的井深增量。障碍物轴线末端点与起始点采用l0表示。若是障碍物为造斜井段情况下,可以对其进行简化,使之形成空间圆环,其中轴线为空间圆弧.
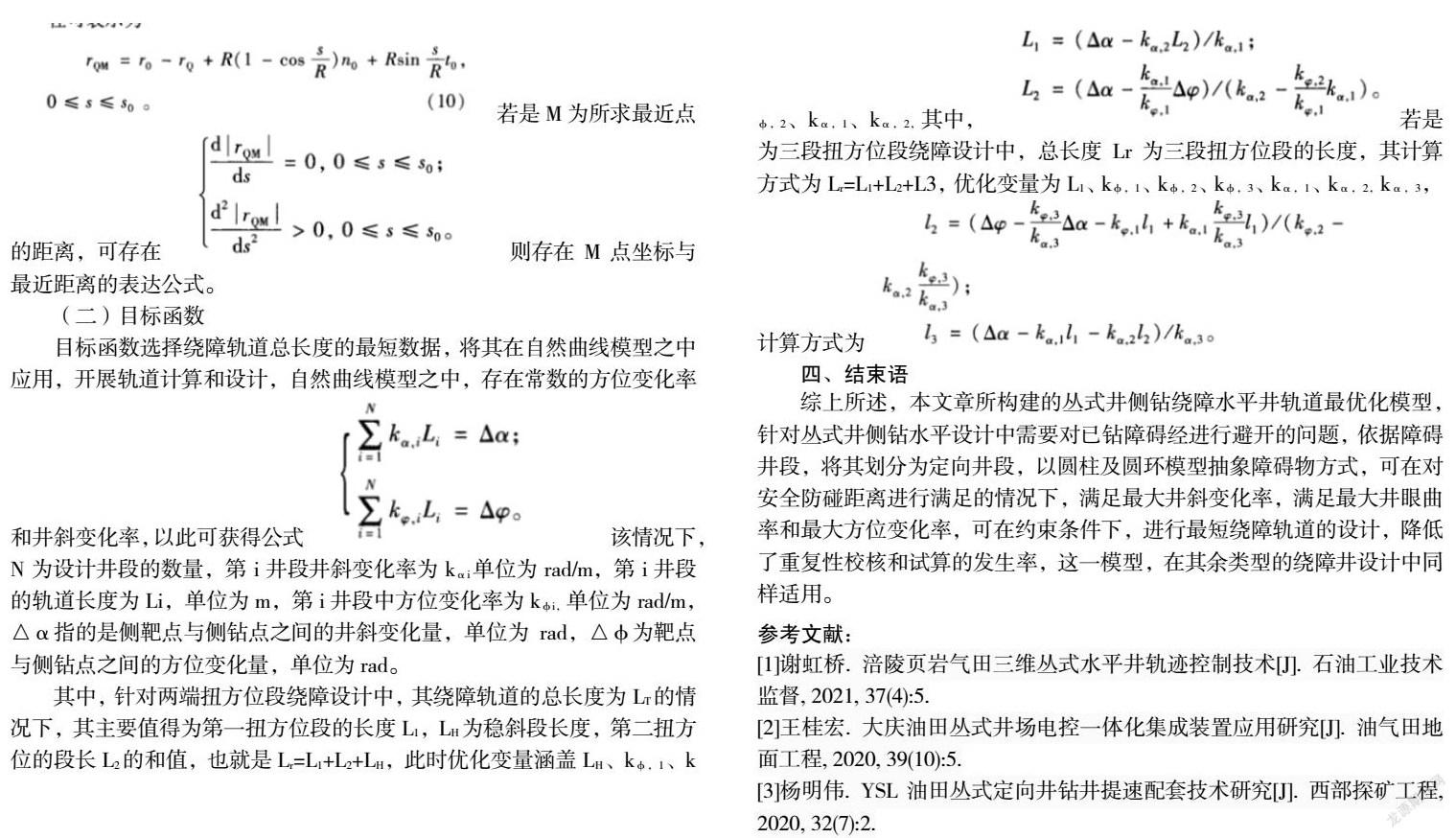
二、绕障轨道类型
绕障轨道类型必须从侧钻点方向,障碍物与靶点方向线之间的相对位置关系出发开展划分,依侧钻点障碍物轴线与八点方向线之间的距离及侧障碍物轴线与侧钻点方向线之间的距离进行障碍物与方向线之间的相交性进行判定。若是侧钻点方向线与障碍物相交或者靶点方向线之中一条线与障碍物相交,则设计绕障轨道中,设计形式为扭方位段与稳斜段及扭方位段联合的设计形式,若是障碍物与两条方向线均相交,则必须设计绕障轨道为扭方位段与扭方位段与扭方位段联合,所以,从不同的轨道类型及障碍物,对侧钻绕障水平井进行类别划分,其中共计包括四种类别,具体见下图3所示[2]。
此时,侧钻点A坐标为(XA,YA,ZA),其中αA及φA,为井斜角及井斜角方位角,首靶点为T1,其坐标为(XT,YT,ZT),其中αr及φr,为井斜角及井斜角方位角,此时侧钻点方向线方程及靶点方向线方程表示形式分别为下列公式:
若是直井段或者斜井段为障碍物的情况下,直线为轴线,此时障碍物轴线与靶点方向线及障碍物轴线与侧钻点方向线之间,最近的距离d1和d2的表示方式分别为 ,计算后可获取,这一算式中,VA——侧钻点A、Vr——首靶点T1及V0——障碍物起始点M0单位方向向量。
此时,若是障碍物为定向井段情况下,圆弧为其轴线形状,若是圆弧的半径为R,则M为圆弧轨迹上相对于起始点M0精神增量的S点,依据上述圆弧及直线矢量方程可以得知,向量 的矢径可以应用下列算式表示,其为 其中,RA代表侧钻点A矢径。此情况下,M点知侧钻点方向下距离可以应用公式dA=|VA×rAM|表示。若是M为圆弧上与侧钻点方位线相距离最近线的情况下,函数极值条件必须满足以下条件: 依据这一公式可以进行s的井深增量方程的获取,可进行M点坐标的计算,也可以获取最近的距离,依靠障碍物与靶点方向线之间最近距离求解过程,得知其与之存在相似性,所以无需赘述。若是计算获取的距离d1及d2其中任意一个距离低于绕障的半径R情况下,则表示,障碍物仅与一条方向线相交,此时仅需要进行两段扭方位段的计算,即可确保安全绕障。若是计算获取的距离d1及d2距离均低于绕障的半径R情况下,则表示,障碍物与上述两条方向线相交,此时仅需要进行三段扭方位段的计算,即可确保安全绕障。
三、绕障轨道最优化设计模型
约束条件
丛式井侧钻绕障水平井设计之中,必须保障障碍物轴线与设计轨道之间的最近距离需要高于安全防碰的距离,此为约束条件,为进行最近距离解析表达式的获取,对模型中约束条件开展最优化干预,轨道设计上,必须进行内插点的设计,分别进行不同内插点至障碍物轴线距离的就算[3]。
假设障碍物为直井段或者斜井段的情况下,融安张桂东设计中,任意一个点P,坐标为(XP,YP,ZP)其至障碍物轴线的距离表示方式为 ,这一算式中,V1赛表障碍物轴线单位方向的向量。若是定向井段为障碍物情况下,假设轨道上任意一点为Q,其坐标为(XQ,YQT,ZQ),其至障碍物轴线上的弧长为s,此时点M矢径表示方式为 若是M为所求最近点的距离,可存在 则存在M点坐标与最近距离的表达公式。
目标函数
目标函数选择绕障轨道总长度的最短数据,将其在自然曲线模型之中应用,开展轨道计算和设计,自然曲线模型之中,存在常数的方位变化率和井斜变化率,以此可获得公式 该情况下,N为设计井段的数量,第i井段井斜变化率为kαi单位为rad/m,第i井段的轨道长度为Li,单位为m,第i井段中方位变化率为kφi,单位为rad/m,△α指的是侧靶点与侧钻点之间的井斜变化量,单位为rad,△φ为靶点与侧钻点之间的方位变化量,单位为rad。
其中,针对两端扭方位段绕障设计中,其绕障轨道的总长度为LT的情况下,其主要值得为第一扭方位段的长度L1,LH为稳斜段长度,第二扭方位的段长L2的和值,也就是Lr=L1+L2+LH,此时优化变量涵盖LH、kφ,1、kφ,2、kα,1、kα,2,其中, 若是為三段扭方位段绕障设计中,总长度Lr为三段扭方位段的长度,其计算方式为Lr=L1+L2+L3,优化变量为L1、kφ,1、kφ,2、kφ,3、kα,1、kα,2,kα,3,计算方式为
四、结束语
综上所述,本文章所构建的丛式井侧钻绕障水平井轨道最优化模型,针对丛式井侧钻水平设计中需要对已钻障碍经进行避开的问题,依据障碍井段,将其划分为定向井段,以圆柱及圆环模型抽象障碍物方式,可在对安全防碰距离进行满足的情况下,满足最大井斜变化率,满足最大井眼曲率和最大方位变化率,可在约束条件下,进行最短绕障轨道的设计,降低了重复性校核和试算的发生率,这一模型,在其余类型的绕障井设计中同样适用。
参考文献:
[1]谢虹桥. 涪陵页岩气田三维丛式水平井轨迹控制技术[J]. 石油工业技术监督, 2021, 37(4):5.
[2]王桂宏. 大庆油田丛式井场电控一体化集成装置应用研究[J]. 油气田地面工程, 2020, 39(10):5.
[3]杨明伟. YSL油田丛式定向井钻井提速配套技术研究[J]. 西部探矿工程, 2020, 32(7):2.
猜你喜欢
航空兵器(2016年4期)2016-11-28
电脑知识与技术(2016年24期)2016-11-14
文理导航(2016年30期)2016-11-12
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14
