
基于KF-BA-LSSVR的无线传感器网络节点定位研究
2022-07-08 09:15束仁义朱家兵沈晓波
重庆科技学院学报(自然科学版) 2022年3期
束仁义 朱家兵 沈晓波 蔡 俊 夏 泐
(淮南师范学院 电子工程学院, 安徽 淮南 232038)
0 前 言
通过中国北斗卫星导航系统(BDS)或者美国全球定位系统(GPS)可以实现户外目标定位;但对于室内、井下、管道等封闭空间,很难通过BDS或者GPS实现准确定位[1],且成本高。因此,可以预先布置无线传感器网络(wireless sensor network,WSN)节点,使用成熟的定位算法来实现精准定位[2]。近年来,WSN在矿井人员定位、室内移动目标定位、天然气管道泄露定位等方面得到了广泛应用。许多学者提出了一些改进定位算法,如Thimmaiah等人提出了一种基于无线电信号强度的WSN定位误差优化技术[3];Chen等人提出了基于WSN距离相关的室内迭代定位算法[4];Lv等人提出了基于GA-PSO-BP混合算法的室内三维空间WSN定位技术[5]。2002年Suykens等人提出了基于最小二乘支持向量回归机(least square support vector regression, LSSVR)算法[6]。周松斌等人将LSSVR算法应用到WSN定位中,有效降低了估计误差对定位精度的影响,减小了平均定位误差[7]。张烈平等人提出了基于粒子群优化LSSVR的三维WSN节点定位算法,与LSSVR算法相比,该算法定位精度更高[8]。钟阳晶等人提出了基于RSSI高斯滤波的LSSVR定位算法,定位误差比未进行高斯滤波处理减少了12%~20%[9]。Zhang等人提出了基于RSSI-TOA和LSSVR算法的WSN节点三维定位算法,该算法比基于LSSVR或RSSI-TOA算法的定位精度更高[10]。
支持向量机是基于统计学习理论的机器学习算法,而LSSVR算法是基于支持向量机的一种改进[11]。本次研究是在LSSVR定位算法的基础上,采用蝙蝠算法(BA)和卡尔曼滤波算法(KF),以提高节点定位精度。通过仿真实验对 LSSVR、基于蝙蝠算法的最小二乘支持向量回归机(BA-LSSVR)与基于卡尔曼滤波和蝙蝠算法的最小二乘支持向量回归机(KF-BA-LSSVR)等3种算法的定位结果,以及基于卡尔曼滤波的最小二乘支持向量回归机(KF-LSSVR)与KF-BA-LSSVR的平均定位误差进行了对比分析。
1 LSSVR定位原理
最小二乘支持向量回归机优化问题的数学模型如式(1)所示[12]:
(1)
式中:ω—— 权重矩阵;
bk—— 偏差;
ξk—— 拟合误差;
P—— 虚拟节点数量;
C—— 大于0的正则化参数;
φ(xk) —— 非线性映射函数。
径向基函数(radical basis function, RBF)选择高斯核函数[13],表达式如式(2)所示:
(2)
式中:Rm,Rn—— 输入向量,m、n=1,2,…,P;
σ—— 高斯核标准差。
通过拉格朗日乘子法得到式(1)所示拉格朗日函数:

bk+ξk-yk)
(3)
式中:αk—— 拉格朗日乘子。
由式(3)分别对ω、b、α、ξ求导可得:
(4)
式中:I为单位矩阵;y=[y1,y2,…,yk];e=[1,1,…,1]T;α=[α1,α2,…,αk];Ω=Q(Rm,Rn)。
由式(4)可得:
(5)
式中:A=Ω+C-1I,由于|A|≠0,故A-1存在。
由式(5)得到最优决策函数:
(6)

(1) 首先将dkj和xk作为输入训练样本量,此时dkj与xk分别对应式(1)中的φ(xk)和yk,同时对dkj与xk进行标准化处理;然后求得bk和αk。

基于LSSVR的定位流程如图1所示。考虑实际定位存在偏差,节点平均定位误差为:
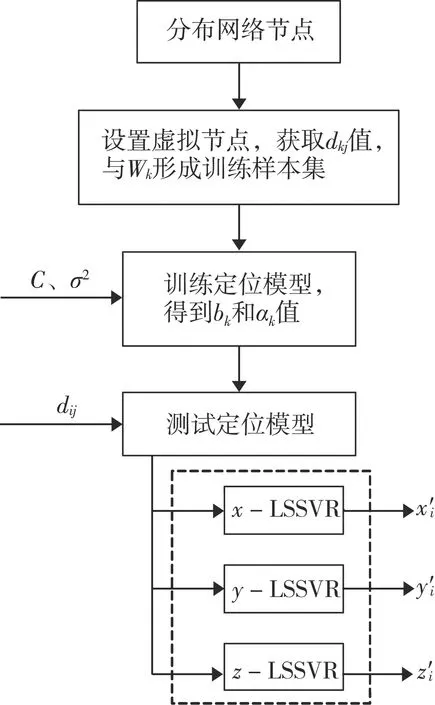
图1 基于LSSVR的定位流程
(7)
2 蝙蝠算法的参数优化
设正则化参数C和高斯核标准差σ的取值范围分别为[0.1,100.0]和[0.1,10.0]。由于确定参数值需要满足定位环境的要求,因此提出一种基于BA算法的优化方法。BA算法是Yang等人于2010年提出的一种新型群体智能算法[14],在求解全局最优解等方面具有很好的效果。
假设在一个D维搜索空间中,存在一定数量的蝙蝠,每个蝙蝠在某个位置以一定速度飞行且具有不同频率。设最大脉冲音量和最大脉冲率分别为G和U。
已知第i个蝙蝠在t时刻的位置、飞行速度和频率分别为Xi,t、Vi,t和Fi,t,则有[15]:
Fi,t=Fmin+β(Fmax-Fmin)
(8)
Vi,t+1=Vi,t+Fi,t(Xi,t-X*)
(9)
Xi,t+1=Xi,t+Vi,t+1
(10)
式中:β—— 服从均匀分布的随机变量,取值范围为[0,1);
X*—— 当前全局最优解。
蝙蝠在空间搜索过程中根据需要调整G和U,更新公式为:
Gi,t+1=λGi,t
(11)
Ui,t+1=Ui,0(1-exp(-γt))
(12)
式中:λ、γ—— 常数,0<λ<1、γ>0。
根据BA算法原理,优化正则化参数C和高斯核标准差σ的步骤如下:
(1) 初始化蝙蝠参数,主要包括种群数、Fmin、Fmax、Xi,t、Vi,t、G和U等。
(2) 定义蝙蝠个体的适应度函数为:
(13)
首先将C和σ代入LSSVR定位算法中,再将定位结果代入式(13)中进行求解,得到Fitness*。
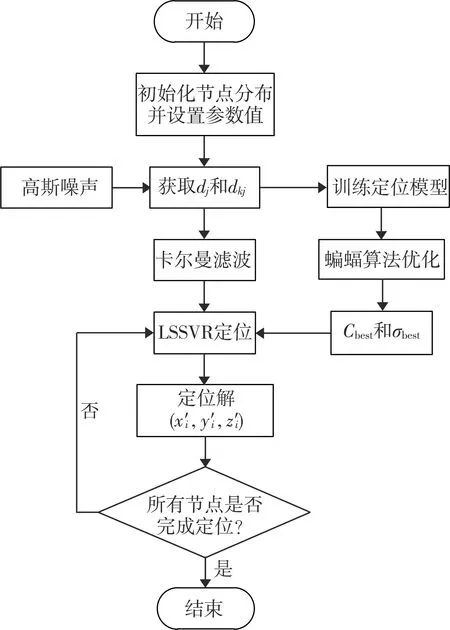
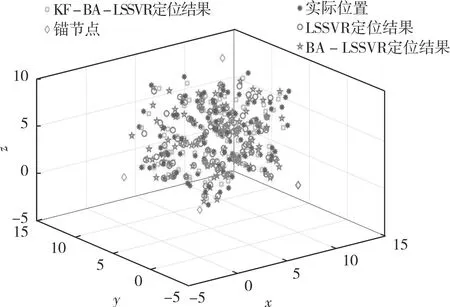
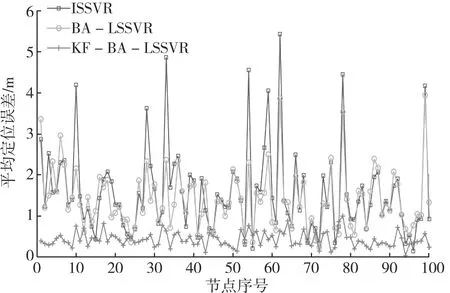
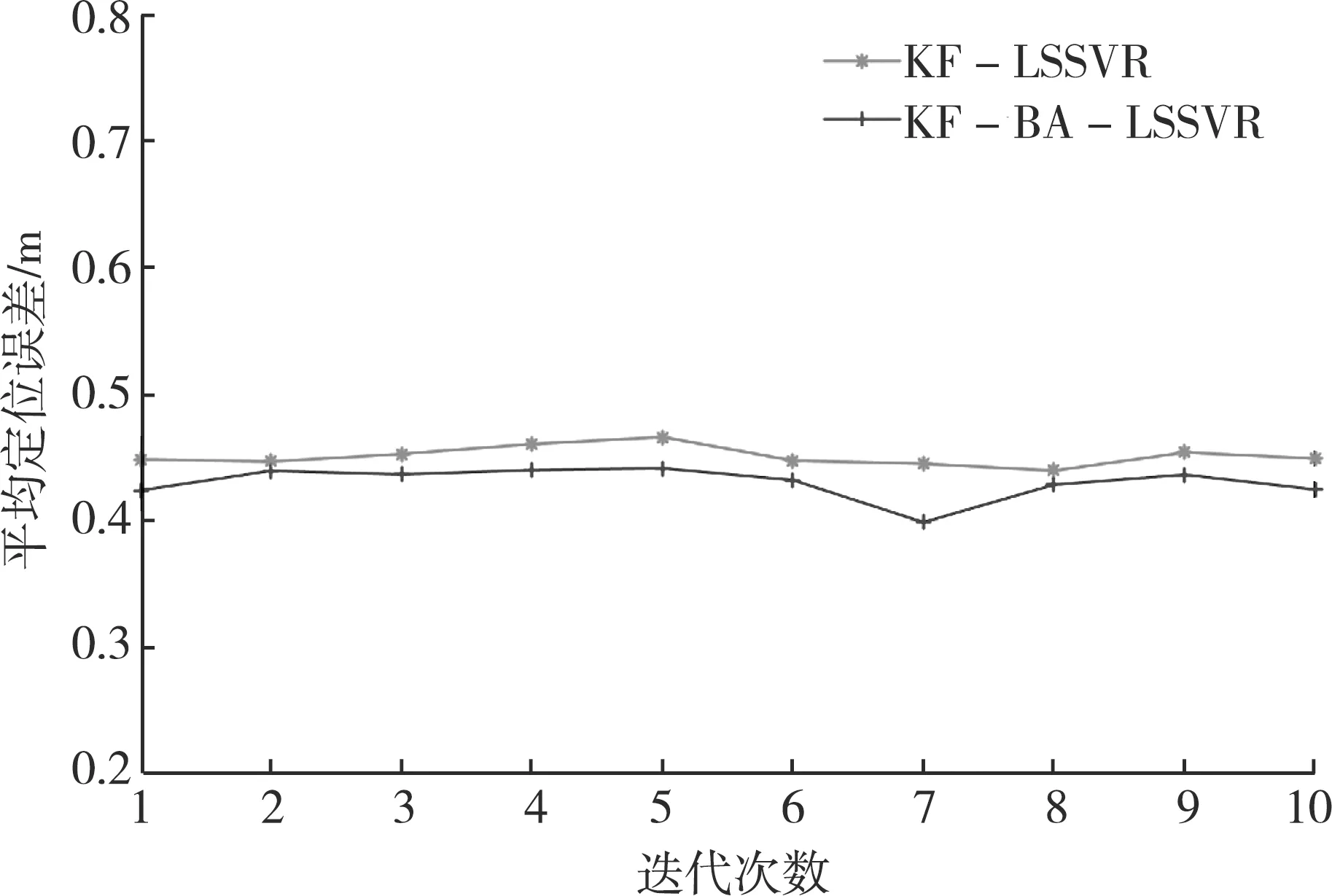
(3) 将步骤(1)和(2)中参数值代入式(8) — 式(10)中,得到C*和σ*。比较最大脉冲率U和均匀分布随机数rand,如果U C=C*+λG (14) σ2=(σ*)2+λG (15) 如果C和σ超出设定范围,则取临界值。 (4) 重复步骤(2)和(3),如果Fitness>Fitness*,计算得到当前全局最优解Cbest和σbest。 (5) 进行多次迭代,重复步骤(2) — (4),得到最终优化的C和σ。 作为输入测试变量,距离对LSSVR定位的精度有很大影响,在实际测距过程中容易受到环境的影响。为了提高测距精度,在高斯白噪声模型下采用KF算法进行距离优化,具体描述如下[16-17]: (1) 状态一步预测: (16) 式中:δ—— 离散时间; Φ—— 状态转移矩阵; (2) 一步预测协方差矩阵: P(δ+1|δ)=ΦP(δ|δ)ΦT+S (17) 式中:S—— 噪声协方差矩阵; P(δ|δ) —— 上一状态的协方差矩阵,设P(0|0)=P0。 (3) 滤波增益矩阵: K(δ+1)=P(δ+1|δ)HT× [HP(δ+1|δ)HT+E]-1 (18) 式中:H—— 观测矩阵; E—— 噪声驱动矩阵。 (4) 状态更新: K(δ+1)ε(δ+1) (19) (5) 协方差矩阵更新: P(δ+1|δ+1)=[I-K(δ+1)H]× P(δ+1|δ) (20) 通过式(1) — 式(5)进行迭代更新,减小高斯白噪声对距离的影响,提高节点定位精度。基于 KF-BA-LSSVR的定位流程如图2所示。 图2 基于KF-BA-LSSSVR的定位流程 表1 BA算法参数设置 按照图2所示定位流程进行仿真实验,对LSSVR、BA-LSSSVR和KF-BA-LSSSVR等3种算法的定位结果及节点平均定位误差(见图3、图4)进行对比分析。经过BA算法优化后得到C=41.836 7、σ2=2.812 3。经过BA算法优化后,LSSVR定位误差减小,而经过卡尔曼滤波后,其定位误差更小。 图3 3种算法的定位结果 图4 3种算法的平均定位误差 在参数相同的仿真环境下分别迭代10、20、30次,根据式(7)得到平均定位误差。由3种定位算法不同迭代次数的误差对比结果(见图5)可知,增加迭代次数没有提高节点的平均定位精度。 图5 3种算法不同迭代次数的平均定位误差对比 在参数相同的仿真环境下,迭代10次,得到 KF-LSSVA和KF-BA-LSSVR的平均定位误差曲线(见图6)。KF-BA-LSSVR算法的平均定位误差比KF-LSSVR算法小。 图6 KF-LSSVR和KF-BA-LSSVR的 为进一步提高基于LSSVR算法的WSN定位精度,提出基于BA算法的LSSVR算法。仿真实验结果表明,基于BA算法的LSSVR定位效果得到了改善。在考虑测量距离受高斯噪声影响的情况下,采取卡尔曼滤波进行距离优化后,定位精度明显提高、定位误差大幅降低。在LSSVR定位的基础上,通过BA优化正则化参数和高斯核标准差,采用卡尔曼滤波算法降低噪声对测距的影响,为WSN三维节点定位提供了一种良好的途径。3 卡尔曼滤波定位


4 仿真实验
4.1 仿真环境



5 结 语
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年8期)2022-08-31
物联网技术(2022年7期)2022-07-21
农业与技术(2022年12期)2022-07-04
导航定位学报(2022年1期)2022-02-17
小天使·二年级语数英综合(2019年4期)2019-10-06
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
智富时代(2019年4期)2019-06-01
