矿用掘进机截割头的振动性能研究
2022-07-14 10:03白晓栋
机械管理开发 2022年6期
白晓栋
(晋能控股煤业集团永定庄煤业公司机掘三队, 山西 大同 037000)
引言
高速摄像机在科学研究和工业领域中有着重要的应用,尤其是在军事方面,生产线或碰撞测试中应用广泛。然而,由于成像和图像分析技术不断改进,基于高速摄像机记录事件的测量技术在工业和科学的其他领域也越来越流行。高速摄像机作为测量技术有很多优点,但也有一定的缺点。在某些应用中高速摄像机的使用并不合理,从而无法得到预期的结果。专用于高速摄像测量技术的各种摄像机、镜头、灯具和计算机软件需要根据特定计量需求配置测试设备,并提供了灵活的可定制性。采矿业中用到了大量自动化和半自动化的设备,而这些设备通常工作在黑暗的矿井中,工作人员难以观察设备的运行状况。迄今为止,在地下采矿中,高速相机的摄影技术尚未得到广泛使用。本文介绍了采用高速相机的摄影技术对选定的掘进机的震动性能进行拍摄,并对其运行中主要部件的运动和振动进行分析。
1 实验设备与测试设备
1.1 掘进机特点分析
本研究采用的掘进机型号为R-130,产自波兰Famur 公司。该掘进机是集连续切割、装载运输和行走于一体的综合掘进设备,结构紧凑、机身矮、重心低、操作方便、工作平稳。切割头采用电机驱动过载能力强。该设备具有一个铰接式切割臂,切割臂臂配有两个装有圆头钻头的切割头,可以将其水平和垂直旋转,以选择性地挖掘方向轮廓的尺寸,通过对切割头进行有针对性地喷水,可以有效地冷却切割头,从而减少其磨损和粉尘的产生。
1.2 摄影测量系统
本研究实验测试中使用的摄影测量系统如图1所示,其主要由两个高速摄像头,控制和记录站以及适当的照明灯组成。使用两个同步摄像机可以实现对三维空间中的机器运动的分析。运动的重建是基于摄影测量空间的交会来实现的[5],鉴于掘进机掘转盘、带有截割头的悬臂以及水泥和沙块的尺寸较大,且掘进机工作时会产生大量的灰尘,摄像机被放置在离掘进机约8 m 的位置,确保摄像机能拍到物体的全景且能保证摄像机免受切割时产生的灰尘的影响。

图1 测试设置中的摄影测量系统组件的布局
1.3 照明系统
合适的照明是确保录制视频材料质量的重要保证,它决定了所获得图像是否能被用于数字分析。为了避免移动导致的图像模糊,单个视频帧的曝光时间为2×10-5s。这意味着,尽管摄像机具有很高的光学灵敏度,但特定视频帧的超短记录时间仍需要非常强的光线。
为此采用了内置IC 双信号的高频灯板CX2802,其结构及外观如下页图2 所示。该光源具有LED 阵列、同步信号电路、控制器和驱动电路。使用发光二极管作为发光体,与摄像机配合使用,通过同步信号电路使其发光持续时间与摄像机的曝光时间完全一致。具有功耗低、发光效率高、信号发光亮度高等优点,可以广泛应用于摄像系统。

图2 CX2802 结构及外观
1.4 坐标系的建立及系统设置
为了使用摄影测量法识别掘进机悬臂的运动和振动,有必要适当调整测试设备的设置。在图像处理过程中,选用位于同一平面上的三个静止点来创建坐标系,并在该坐标系中分析研究对象的运动。此外,标记最好能便于运动分析应用程序识别。为此,在试验设置中使用了附着在水泥和砂块上的象限标记。结果显示,基于该象限标记的坐标系能让被观察物体上的选定点的坐标位置保持一致。采用同样的方法,确定了被放置在掘进机的悬臂和转盘上的标记点。水泥和砂块的切割过程中,测试装置的每段记录时长为13 s,这个该试验装置高速摄像机的集成存储器在假定的记录频率(500 Hz)下允许的最长记录时间。这样的掘进方式也是悬臂式掘进机在巷道或隧道中切割掘进工作面的标准掘进方式,因此,也可以被认为是悬臂式掘进机主要的工作运动。
2 数据处理
采用TEMA Motion 3D 软件分析运动。首先将视频被导入到软件,并定义如图3 所示的标记点,这样坐标系的位置和空间方向就已经被确定下来。其次,引入了镜头畸变的校正因子,消除了图像的曲率和畸变。接下来在记录的连续帧上跟踪所分析的测量点的位置变化视频并将分析结果所获得的标记坐标(X、Y、Z)被输出到电子表格,然后被转置到已确定的X、Y、Z 固定坐标系中,其中X 轴和Y 轴位于地板平面上,Y 轴平行于掘进机的纵轴并指向水泥和砂块,而Z 轴指向上方。最后根据已知几何形状的吊杆上的标记坐标得出平行于地板和垂直于地板的悬臂倾角,即αh和αv,并与安装在掘进机上的测量系统(划线传感器)获得的悬臂倾角趋势进行了比较。

图3 TEMA Motion 3D 界面动臂、水泥和沙块上的标记视图
3 结果与讨论
如图4 和图5 所示,随着时间的增加,采用拉线传感器测定的平行于地面的动臂倾斜角的值近似恒定于18.5°,而垂直于地面的动臂倾斜角的值从15°减小到4°。这是由于掘进机向下切割水泥和砂块表面的工作方式造成的。使用摄影方法分别分析的上述角度获得的趋势线与拉线传感器测定非常相似。对于拉线传感器法而言,摄影测量法测得的趋势线向上移了约0.3°~1°。从摄影测量获得的垂直于和平行于地面的动臂倾斜角趋势中观察到更高的振动幅度,这是由于在固定的X、Y、Z 参考系统中进行测量的结果导致的。

图4 用拉线传感器和摄影测量系统记录的平行于地面的吊臂倾角趋势

图5 用拉线传感器和摄影测量系统记录的垂直于地面的吊臂倾角趋势
在切割过程中产生大量灰尘,并且由于切割头的旋转运动,因此很难直接观察切割头的位置。因此,瞬时切割头的位置其是根据放置在动臂上的W1和W2标记的当前位置确定的,也就是旋转轴线与动臂纵轴交叉点。接下来,确定沿固定X、Y、Z 坐标系的轴速度和加速度的分量,并计算此类偏移的分量的对于时间的导数。为了比较从这两种方法获得的趋势线,将基于摄影测量确定的加速度矢量转换为X、W、Y、W、Z、W 坐标系,比较结果如下页图6 所示。对于从加速度计和摄影测量方法获得的趋势,周期性清晰可见,并且从两种测量方法获得的振动加速度具有相似的变化范围方法。但是,对于摄影测量而言,有很高比例的高频成分[6]。通过对所分析的动态特性进行频谱分析证实,这是切削头移动趋势随时间变化的时间导数的直接结果,从而给出了速度趋势,并进而给出了给定点的振动加速度值。推导过程增加了输出信号中测量噪声的份额。

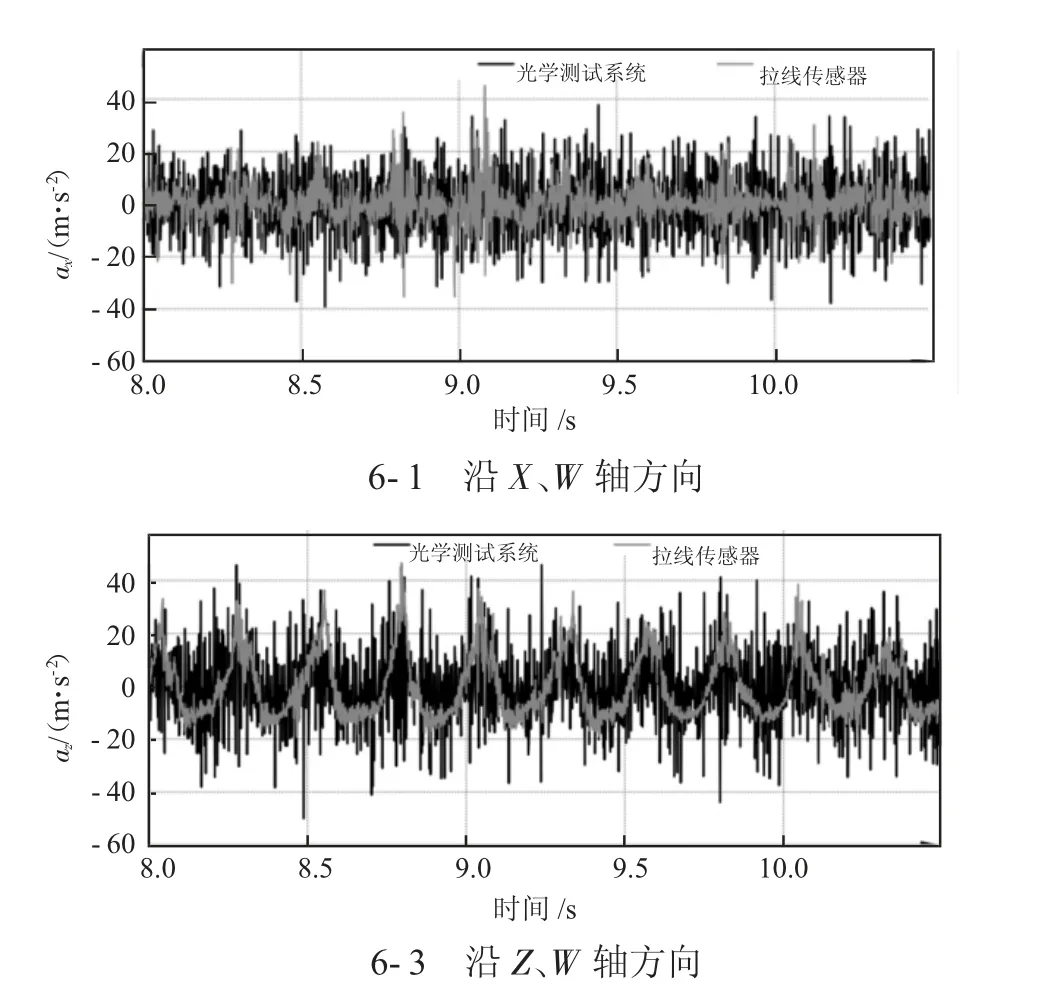
图6 切割头的振动加速度趋势
4 结语
介绍了基于高速摄像机的摄影测量系统的振动测量方法,该方法基于观察物体快速变化现象,包括确定各种物体或其特征点在三维空间中振动的位移、速度和加速度的时间趋势等。光学测量方法的一个重要优点是它们对研究对象结构的干扰可以忽略不计,标记的大小和形状可由分析记录图像的软件识别。由于测量是远程非接触式的,因此,系统不会受到可能随着机器操作过程产生的潜在损坏因素的直接影响。然而,由于使用光学方法和高速照相机进行测量,该解决方案需要合适的环境条件来进行测量,包括空气透明度、湿度和温度等,在进行测量之前,必须进行深入分析,选择视野的大小和摄像机位置和位置,确定测量的分辨率、范围、不确定性。
猜你喜欢
西部探矿工程(2022年8期)2022-08-08
科学与财富(2021年33期)2021-05-10
房地产导刊(2020年8期)2020-09-11
摄影之友(影像视觉)(2017年11期)2017-11-27
三联生活周刊(2017年1期)2017-01-11
办公自动化(2016年18期)2016-12-17
中国新技术新产品(2016年20期)2016-12-08
山东工业技术(2016年15期)2016-12-01
办公自动化(2016年18期)2016-08-20
山东工业技术(2015年21期)2015-11-04