一种基于“图像+”的智能分类垃圾桶设计
2022-07-17 12:16刘美华傅彩明刘进宁顺兴唐晓天
科技资讯 2022年12期
关键词:图像
刘美华 傅彩明 刘进 宁顺兴 唐晓天


摘要:根据第六届全国大学生工程训练综合能力竞赛中“智能分类垃圾桶”要求,该文设计并制作了一种基于K210视觉模块进行目标检测的智能分类垃圾桶。在模拟环境和竞赛环境下,对该设计检测分类精准度进行多次测试,该智能分类垃圾桶拥有98.7%的平均正确识别率,且识别时间短,同时具备满载报警功能,能够实现垃圾分类过程的高效化与智能化,有助于降低城市垃圾源头处理成本。
关键词: 图像+ 智能分类垃圾桶 K210视觉模块 分类精准度
中图分类号:TN929.5 文献标识码:A 文章编号:1672-3791(2022)06(b)-0000-00
生活垃圾分类对于城市良好生活环境的建立和资源最大化利用具有重要义。一方面,部分可回收垃圾得以循环利用、资源再生,给社会、经济、生态三方面带来共赢的局面;另一方面,部分不可回收垃圾也得以正常处置,最大限度地减低环境污染情况。
然而,目前中国居民普遍存在垃圾分类意识薄弱、垃圾分类知识掌握不足的问题,导致垃圾分类不彻底甚至不分类垃圾,给后续的垃圾处理带来巨大的困难。尽管各个城市也都采取了各种奖惩措施来推动垃圾分类,但是从实际执行的过程及效果来看,并没有达到预期。因此,如何从源头上解决垃圾分类问题是我们亟待解决的问题[1-3]。
该文从家庭源头分类出发,利用视觉图像技术和K210平台,并结合分类机构,设计了一款家用智能分类垃圾桶样机。通过多次实验表明,该垃圾桶能对所投垃圾进行智能识别并分类入桶,可有效代替人为分类,提高城市居民生活垃圾分类的执行率。
1整体设计
根据第六届全国大学生工程训练综合能力竞赛内容,所设计的智能分类垃圾桶应该具有以下功能:智能垃圾桶应能正确识别所投放的垃圾属于“可回收垃圾、厨余垃圾、有害垃圾和其他垃圾”四类中的哪一类,并自动投入到对应的垃圾桶中;投放垃圾时界面能实时显示所投垃圾种类名称、投放数量、任务是否完成等;当垃圾桶存放容量达到垃圾桶总容量的80%及以上时,界面显示满载并报警提示。
2 机械结构设计
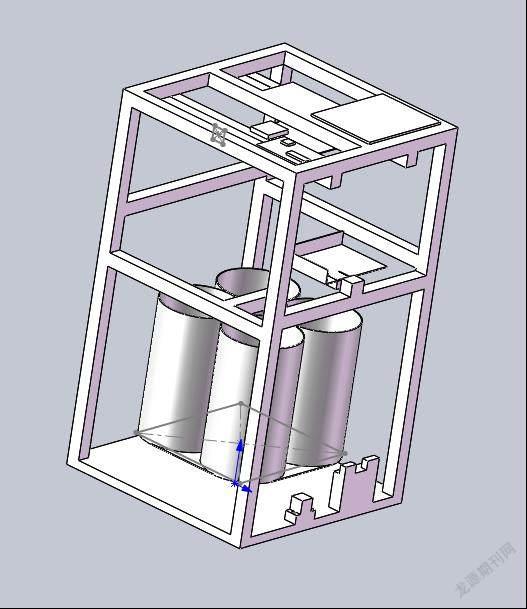
智能分类垃圾桶由四部分组成:整体框架、投放装置、识别机构、垃圾桶等,其机械结构模型图如图1所示[4-5]。整体框架主要由铝材方管、角件以及螺钉、螺母等搭建完成,分为上下两层。其中,上层主要用于固定单片机、摄像头、传感器、显示屏、电池等设备;下层的主要功能是固定垃圾桶和投放装置。同时,为了提高图像识别的准确率,降低环境光线影响,箱体上层四周用亚克力材质的板子做遮光处理,并在内部安装环绕四周的LED灯条。顶盖用荷叶固定,双向打开,一侧用于检查和维修电路,另一侧用来观察和调整垃圾桶放过程中投放装置的运行状态。
垃圾桶的底部装在一台步进电机上,步进电机旋转将带动4个垃圾桶进行旋转,当视觉识别装置识别出相应的垃圾后,垃圾桶则旋转到相应的位置。
投放装置为托盘结构,下端连有二自由度舵机,驱动投放装置做俯仰运动完成垃圾投放的动作。
3 智能分类垃圾桶软硬件系统
3.1视觉系统K210
垃圾分类的核心是图像的处理和识别[6]。不同类型的垃圾具有不同类型的特征,K210首先根据垃圾的形状、颜色、大小等特点,对大量图片进行学习,获取其特征,并自动将学习过的图片进行存档保存并建立数据库。当使用的时候,对投入的垃圾与数据库中学习过的垃圾进行一一对比,将对比相似系数最高的那一类输出至单片机系统。
3.2单片机控制系统
系统选用型号为STC89C52RC的单片机作为数据处理中心。作为整个系统的控制大脑,单片机控制步进电机旋转,带动垃圾桶旋转到相应的投放口,并且将超声波传感器检测的距离传输读取,进行满载提示等。
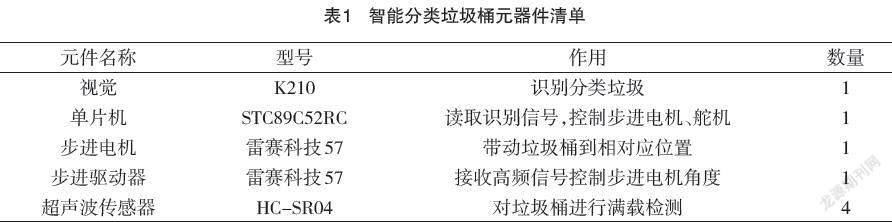
3.3 智能分类垃圾桶元器件清单表
3.4 智能分类垃圾桶电气原理图
4 智能分类垃圾桶视觉程序编写
4.1 图片学习方法
第一步:数据采集和转换。首先,对需要识别的垃圾要拍摄大量图片,然后存储于一个 example 文件夹,文件夹中文件命名只能为英文。然后,将图片分辨率调整为 224×224 格式。
第二步:上传数据集进行训练。首先,获取机器码。机器码是通过将一个固件下入 Maix bit 或者其他 Sipeed 的 K210 获得。然后,查看获取的机器码。打开串口调试器,输入连接参数,查看机器码。最后,打开 MaixHub 训练平台,填入自己的邮箱和刚刚获得的机器码,选择分类目标识别,上传数据集,也就是刚刚的*.ZIP 格式文件,点击开始训练。
第三步:下载并运行训练结果。训练完成,训练结果会发送到填写的邮箱中,下载压缩包,解压后比较重要的有以下三个文件:第一个文件 boot.py 是测试代码,第二个文件 labels.txt 是种类,第三个文件 m.kmodel 是模型文件。接下来将上面所有文件下载入 U盘中,用Maixpy IDE 打开boot.py,用数据线连接开发板,運行脚本,即可看到分类效果
4.2程序编写
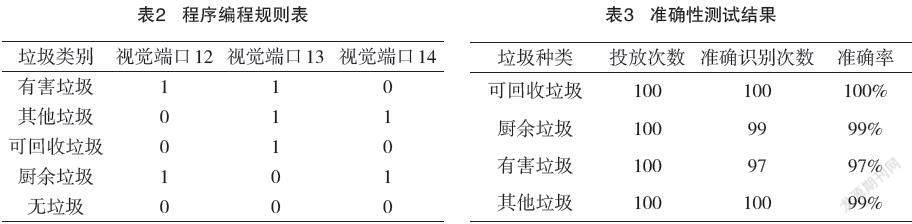
视觉程序编写依照不同的分类识别编写程序,如果为四种垃圾的话,将对三个输出口进行输出,输出的信号由单片机进行识别。例如:视觉模块上硬件接线的三个端口分别是12、13、14。则可以设定为:1为输出,0为不输出,规则表见表2所示。最后,在程序中将检测的结果通过以上表格的数据排列输出。
5 智能分类垃圾桶单片机程序编写
5.1接收视觉传输过来的信号并处理信号
将视觉三个端口传输过来的信号作IF、Then函数,并且定义通道。单片机控制视觉程序主片段如图3所示。
5.2旋转步进电机与舵机
根据定义的视觉信号通道,对识别出来的垃圾分类做出相对应的信号,该信号将原先設置好的PWM脉冲波形长度传输到步进驱动器,步进驱动器再通过细分调节输送至步进电机,并且旋转角度正确。在步进电机旋转的角度正确后,也就说明垃圾桶已经到达相对应的位置,然后将托盘下的舵机向右旋转90°,带动托盘上面的垃圾倒至相对应的垃圾桶中。具体程序略。
5.3满载检测
垃圾满载利用超声波模块检测。超声波传感器是利用波形扫描测试距离,根据发出信号和接收回来信号的时间不一样,进行测试距离。当垃圾桶中的垃圾达到了80%的位置时,系统将认为此垃圾桶已经满载,并且发出信号。具体程序略。
6 实验过程及结果分析
- 在实验中对以下几种常见的生活垃圾采集数据集并进行训练。 可回收垃圾:牛奶盒、易拉罐、矿泉水瓶等;厨余垃圾:香蕉皮、苹果块、菜叶、橘子皮、辣椒等;有害垃圾:电池(1、2、5、7号)、医用棉签、樟脑丸等;其他垃圾:陶瓷片、砖瓦片、烟头等。
(2)根据垃圾种类,随机抽选以上四类垃圾中的10件,依次放入垃圾桶中,记录分类识别的准确率和识别时间。
(3)对测试结果进行记录,如表3所示。
从多次实验结果中可以得出,智能分类垃圾桶对可回收垃圾、厨余垃圾、有害垃圾、其他垃圾的识别平均正确率可达有98.7%,并在湖南省第六届大学生工程训练大赛中荣获省级一等奖1项,二等奖1项。
7 结语
针对目前家庭垃圾分类不彻底甚至不分类的现实问题,该文设计一种基于K210视觉模块进行目标检测的智能分类垃圾桶,旨在赋予机器视觉功能,帮助或者有效代替人为分类,实现垃圾分类过程的高效化与智能化。从多次测试数据可以看出,该智能分类垃圾桶识别率高,识别时间短,兼具满载报警功能,符合设计初衷,有助于缓解垃圾围城的困境,降低城市垃圾源头处理成本。
参考文献
[1] 宋铁.基于机器视觉的家庭智能分类垃圾桶设计研究[D].上海:东华大学,2019.
[2] 刘齐锋.基于光电图像识别的智能垃圾分类技术的研究[D].成都:电子科技大学,2021.
[3] 王镒杰,赵华,李欣仪,等.我国垃圾分类现状分析与解决方法[J].机械制造,2018,56(12): 138-139.
[4] 樊肖艳,司阔,冯国庆. 一种基于“图像+”识别方式的智能垃圾分类装置[J].电子世界,2021(20):129-131.
[5] 刘文斌,杨代云,李谦.一种智能垃圾分类箱的设计[J].农机使用与维修,2021 (1): 36-39.
[6] 方梓锋,张锋.基于K210和YOLOV2的智能垃圾分类平台[J].自动化与仪表,2021,36(8):102-106.
猜你喜欢
读者(2019年23期)2019-11-15
小猕猴智力画刊(2019年12期)2019-01-08
初中生世界·九年级(2018年12期)2018-12-22
电子技术与软件工程(2016年23期)2017-03-06
读者(2015年9期)2015-05-04
南方周末(2014-03-27)2014-03-27
初中生世界·八年级(2014年2期)2014-03-15
智慧与创想(2013年5期)2013-06-25
意林(2011年10期)2011-05-14