基于负荷模式能量的电力系统低频振荡抑制策略
2022-07-20 01:44蔡国伟张宇驰
电力自动化设备 2022年7期
刘 铖,王 旭,蔡国伟,张宇驰
(现代电力系统仿真控制与绿色电能新技术教育部重点实验室(东北电力大学),吉林吉林 132012)
0 引言
在大力推动能源绿色低碳转型的背景下,以风、光等新能源为主体的新型电力系统发展越来越迅速[1],但新能源出力的随机性、波动性等因素使得系统的有功功率不平衡越来越突出,对系统稳定性产生不良影响[2]。仅依靠对电源的调度与控制无法保证以新能源为主体的新型电力系统安全高效经济运行[3],因此需要更多的可控环节来参与系统调控过程。随着电力市场化、需求侧管理以及虚拟电厂技术的发展[4-6],可控负荷的种类越来越多,例如除大功率加热器、锅炉等适用于公用事业控制的传统负荷具有可控性外,还有很多新型可控负荷如电动汽车、空调负荷、虚拟电厂聚合体等也可以参与电网调控。同时可控负荷调节越来越成熟,为负荷作为可控环节参与系统调控过程提供了可能。负荷可实时参与到电力平衡中,使得负荷可以作为一个可控环节参与到系统调控过程中,成为电网调控的灵活性资源。负荷的可控性为抑制系统振荡提供有效途径,保证以新能源为主体的新型电力系统安全稳定运行。
新型电力系统是以新能源为主体,并由输电线路、负荷等部分组成的统一系统,其中负荷作为系统的重要组成部分,对系统小干扰稳定具有非常重要的影响。文献[7]采用处于机电模式的摆锤模拟装置来解释负荷对于系统阻尼的影响。文献[8]对不同负荷模型下系统阻尼改善情况进行了分析。文献[9]对负荷模型进行小干扰处理,分析负荷的特性以及位置对振荡阻尼的影响。文献[10]基于负荷模型参数灵敏度评估了负荷大小、接入位置对电力系统阻尼的影响。文献[11-12]推导了负荷的阻尼转矩表达式,探究负荷对系统低频振荡阻尼的影响。文献[13-14]根据系统特征值分布的情况,探讨了负荷模型的不确定性对系统振荡模式的影响。由上述研究可知,目前分析负荷对于系统小干扰稳定性影响的方法主要有阻尼转矩法、特征值分析法。阻尼转矩法过于依赖系统的线性化模型,在系统结构发生微小变化时,需要对模型进行较大的修改;而特征值分析法受制于系统的规模,由于特征值分析法针对电力系统特征值进行求解,因此对负荷振荡特性的物理化描述尚且不足。此外,现有研究大多只分析负荷对系统低频振荡的影响,对调控负荷的选择以及低频振荡调控策略的制定鲜有研究。
针对上述不足,若可从能量角度揭示其物理特性,对不同模式进行处理,则可有效揭示负荷参与振荡的本质和能量转换过程,并可据此设计振荡抑制策略。因此,本文从负荷模式能量角度提出了电力系统低频振荡调控策略。首先构建物理意义清晰的电力系统小干扰负荷模式能量函数,通过能量结合小干扰的方法揭示负荷与系统振荡的内在联系;然后基于负荷模式能量构建负荷低频振荡评价指标与负荷灵敏度指标,确定负荷的控制方式,筛选出调控负荷,进而设计电力系统低频振荡调控策略;最后基于3机9节点系统以及16机68节点系统验证了本文所提控制策略的有效性和正确性。
1 基于静态负荷模型的电力系统负荷模式能量函数构建
1.1 静态负荷模型
随着电力市场化和需求侧管理的快速发展,以及第三方独立主体(虚拟电厂)聚合平台的逐步完善[15-16],负荷可控方式已经越来越成熟,适用于公用事业控制的负荷成为具备技术条件并参与电网调度的可调节负荷,其对象主要聚合系统中满足准入条件的大功率加热器、锅炉等群体以及电动汽车、空调等其他类型的可控负荷。本文针对加热器、锅炉等可控负荷聚合群体研究系统小干扰稳定问题[10,17],采用静态负荷模型能够描述电压或频率缓慢变化时的可控负荷特性。此外,加热器、锅炉等可控负荷聚合群体在短期内非常接近恒定电阻的特性,因此,本文采用静态负荷模型中的恒阻抗模型对可控负荷建模并进行小干扰稳定分析,具体如下:
式中:PL为负荷有功功率;QL为负荷无功功率;U为负荷所在母线的运行电压;U0为负荷所在母线的稳态运行电压;PL0为负荷在稳态运行时的有功功率;QL0为负荷在稳态运行时的无功功率。
1.2 电力系统小干扰负荷模式能量函数构建
为了能够准确分析负荷参与振荡的物理过程,通过将电力系统小干扰与能量相结合的方式,构建电力系统负荷模式能量函数。
对系统动态响应的高阶非线性方程在平衡点处进行小干扰线性化处理,得到的表达式为:

式中:Δx=[Δxδ,Δxω]T,Δxδ、Δxω为同步机状态变量;ΔU=[Δui,Δθi,Δmi]T,Δui、Δθi分别为网络中母线i电压幅值和角度增量,Δmi为网络中母线i其他代数变量;A、B、C、D为系数矩阵。
系统状态向量的解的一般形式为:

式中:ψj、ϕj分别为系统左、右特征向量;x0为系统状态向量的初始值;λj为系统特征值;n为系统状态矩阵阶数。
因此,系统输入矩阵可表示为:

式中:F=-D-1C。
负荷所在母线i电压幅值与角度振荡增量表达式分别为:
母线i所对应负荷的模式能量表达式为:

式中:ΔVLi为小干扰下母线i所对应负荷的模式能量;ΔPLi为母线i所对应负荷的功率增量;Δθi为负荷所在母线i的电压相角增量。
对式(6)求导得:

将式(7)与式(9)代入式(8)中,则得到负荷i的模式能量表达式为:
式中:PLi0为母线i所对应负荷在稳定运行时的有功功率;ΔVLz为负荷模式能量自相关模式;ΔVLh为负荷模式能量互相关模式。
负荷模式能量自相关部分指系统状态矩阵的机电特征值自身交互,组成机电特征值自身2 倍的形式,负荷模式能量互相关部分指不同的特征值两两交互。负荷模式能量自相关部分在单一主导模式系统中起到关键作用,可针对自相关部分来分析负荷对系统小干扰稳定性的影响[18]。
2 基于负荷模式能量的电力系统低频振荡调控策略
2.1 基于负荷模式能量的低频振荡评价指标和灵敏度指标构建
2.1.1 基于负荷模式能量的低频振荡评价指标
系统中各个节点的负荷在不同控制方式下对于系统小干扰稳定性的影响不同。通过负荷模式能量表达式的构建,可求解不同模式下的负荷模式能量。针对需要进行调控的模式,求解该模式下的负荷模式能量,进而构建出判断负荷调控方式的低频振荡评价指标L为:

式中:v2表示控制方式为增加负荷功率下负荷模式能量;v1表示控制方式为减少负荷功率下负荷模式能量。
所建立的指标值是基于负荷模式能量变化程度进行评价,选择负荷模式能量曲线的第一摆极大值与第二摆极大值的差值代替。根据不同控制方式下负荷模式能量变化程度的差别,可以判断不同控制方式下负荷对于系统小干扰稳定性改善的程度。若L>0,则表征负荷增加可改善系统小干扰稳定,控制方式采用增加负荷有功功率;若L<0,则表征负荷减少对于电力系统小干扰稳定起到改善作用,控制方式采用减少负荷有功功率。通过所构建的负荷控制方式评价指标,选择通过负荷改善系统小干扰特性的控制方式,为从负荷侧对低频振荡抑制在调控方式选择方面提供了依据。
2.1.2 基于负荷模式能量的负荷灵敏度指标
系统在发生低频振荡时,发电机的模式动能与网络中的支路与负荷的模式势能相互转化[19-20]。其中,负荷承担由发电机的模式动能转化的模式势能越多,振荡越严重,因此负荷模式能量变化程度可以表征负荷对于系统小干扰稳定的影响程度,构建基于负荷模式能量的负荷灵敏度指标M为:
式中:vLi为负荷i模式能量;t1b为负荷模式能量曲线中第一摆的极大值对应的时刻;t2b为负荷模式能量曲线中第二摆的极大值对应的时刻。
通过负荷灵敏度指标,可以表征在负荷有功功率增量改变的情况下,对负荷模式能量变化程度的影响,进而反映负荷对于系统小干扰稳定的影响程度。分别求取负荷灵敏度指标,然后对所有负荷进行排序,从而选择出改善系统小干扰特性的最优调控负荷。
2.2 基于负荷模式能量的阻尼调控策略
根据DL/T 1234—2013《电力系统安全稳定计算技术规范》规定,系统一般临界阻尼比为0.03。对于系统处于失稳条件下,选取负阻尼模式进行调控,通过对负荷的调控可以使系统重新恢复至稳定状态;对于系统弱阻尼振荡以及区域间振荡,在满足系统稳定的条件下,通过多轮次调控负荷,可以使得系统区域间振荡模式阻尼大于0.03。
首先对系统进行小干扰计算,选定需要进行调控的模式。基于负荷模式能量计算负荷低频振荡评价指标,确定负荷的调控方式。在选定各个负荷控制方式的情况下,改变负荷的有功功率为0.5 p.u.,计算得到负荷灵敏度指标,进而对负荷进行排序,按照排序选择调控负荷,多轮次调节调控负荷,将系统的模式阻尼提升至临界阻尼的要求。具体流程如图1所示。
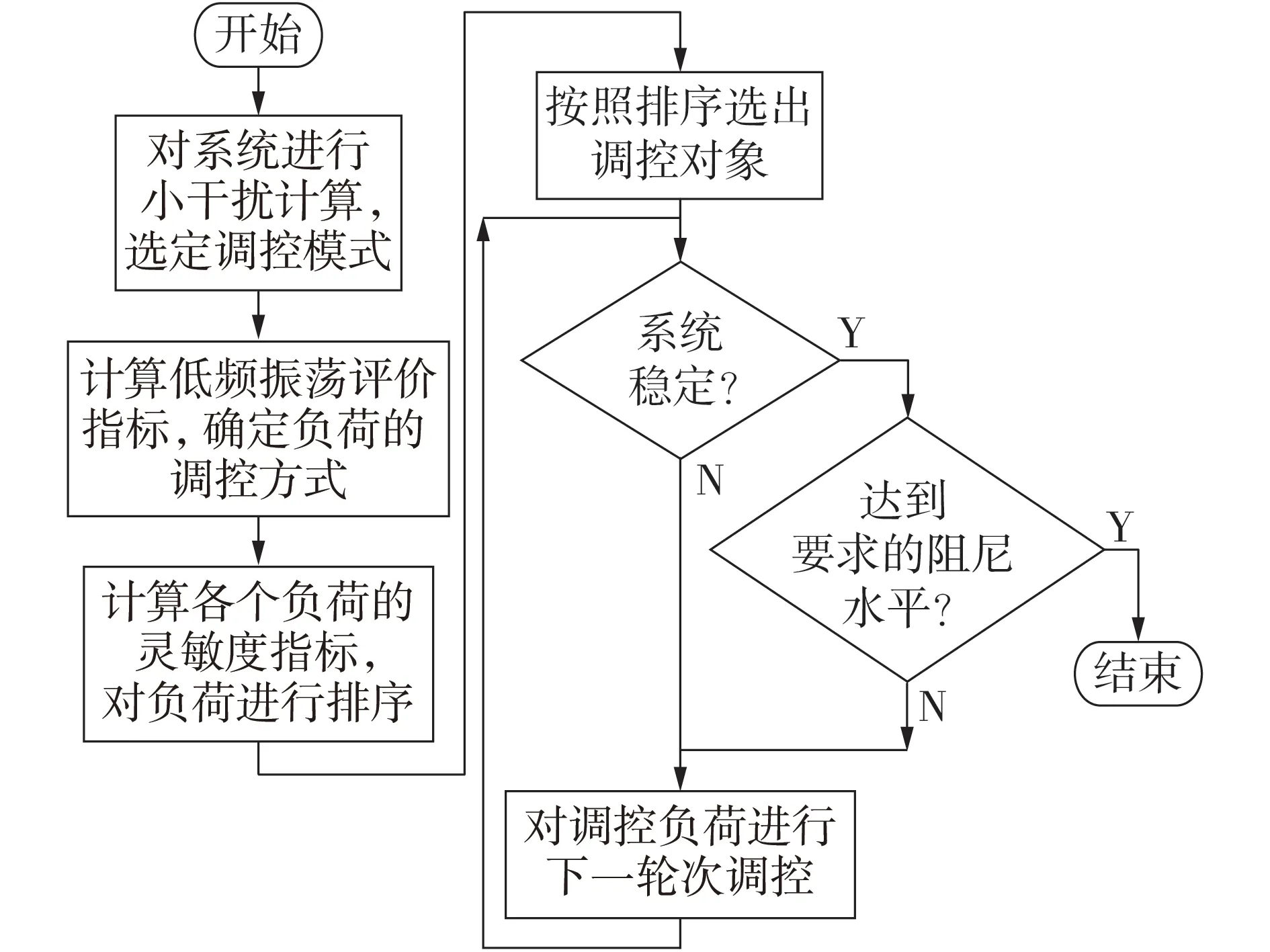
图1 负荷阻尼调控策略流程图Fig.1 Flowchart of load damping control strategy
针对电力系统小干扰稳定的负荷调控策略具体步骤如下。
步骤1:对系统进行小干扰分析,计算系统机电振荡的特征参数,其中包括系统各个模式振荡频率和阻尼比,选定需要进行调控的模式。
步骤2:计算基于负荷模式能量的低频振荡评价指标,确定负荷的调控方式。
步骤3:计算基于负荷模式能量的灵敏度对负荷进行筛选和排序,选择调控对象。
步骤4:判断系统是否稳定。
步骤5:若系统不稳定则对调控负荷进行下一轮次调控;若系统稳定则判断系统是否达到要求的阻尼水平,若没达到要求的阻尼水平,则对调控负荷进行下一轮次调控,直至达到要求的阻尼水平。
3 仿真分析
为了验证本文所提出的基于负荷模式能量的低频振荡调控策略的有效性,采用3 机9 节点系统、16机68节点系统进行仿真验证。
3.1 3机9节点系统
负荷模式能量曲线可以很好地体现不同模式对系统小干扰的影响,从而分辨出影响系统小干扰稳定的主要振荡模式。以3 机9 节点系统为例进行分析,分别在节点5、节点6、节点8 处接入恒阻抗负荷模型,系统接线图见附录A 图A1,系统小干扰计算结果见附录A 表A1。系统基准容量为100 MV·A,发电机采用经典的同步机模型并考虑阻尼系数。
针对3机9节点系统中不同位置的负荷,分析负荷在不同模式下所表现出的模式能量特性,图2、3为不同模式下的负荷模式能量曲线。图中负荷模式能量为标幺值,后同。

图2 模式1下不同负荷模式能量曲线Fig.2 Mode energy curve of different loads in Mode 1
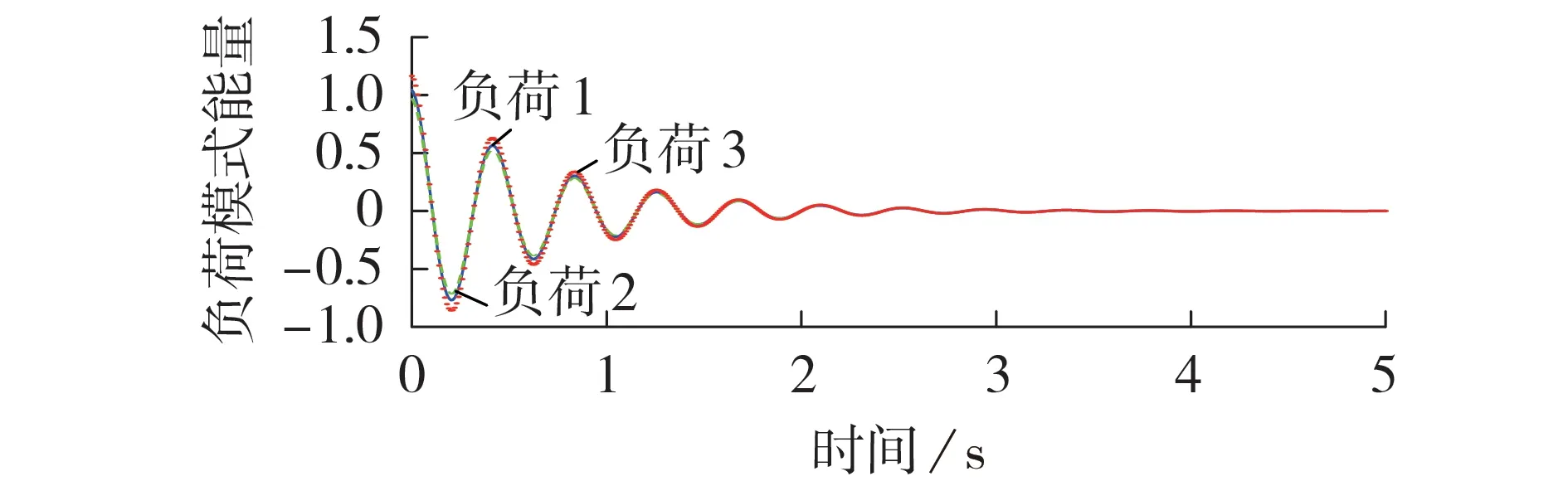
图3 模式2下不同负荷模式能量曲线Fig.3 Mode energy curve of different loads in Mode 2
由图2、3 可知,对于负荷分解出的负荷模式能量在模式2 的幅值都要大于模式1 的幅值。将相同模式下3 个负荷对应的模式能量进行叠加,得到各个模式下总负荷模式能量曲线见附录A 图A2,也可以看出模式2 下所叠加的负荷模式能量要大于模式1 下所叠加的负荷模式能量。因此可以得出模式2为系统小干扰稳定性最为关键的主导振荡模式。
通过小干扰离线计算得到的负荷特性分析的结果与实际故障时系统所表征出来的负荷特性具有一致性。基于上述算例,在节点7 处加入持续时间为0.02 s、对系统冲击程度很小的短路故障,对各个负荷的有功功率对应模式下的频率进行时域(Prony)辨识,结果见附录A 图A3—A5。从仿真曲线可以分析得出模式2 为加入短路故障后系统的主导模式,通过小干扰离线计算得到的结果与故障后在线时域辨识得到的结果具有一致性。
3.1.1 负阻尼系统
在3 机9 节点系统中通过减少发电机有功出力的方式将系统模式2 的阻尼调整为负值,系统小干扰计算结果见附录A表A2。模式2为需要调控的模式,模式阻尼为负阻尼,其大小为-0.023 38,通过仿真得到模式2 下各个节点负荷模式能量见附录A图A6。
基于负荷模式能量计算负荷的低频振荡评价指标,通过评价指标来选择负荷的控制方式,计算结果如表1 所示。按照负荷的低频振荡评价指标可以判断出减少负荷有功功率有助于改善系统小干扰稳定特性。对处于不同位置的负荷分别减少相同有功功率,取ΔPL=0.5 p.u.,分别计算负荷灵敏度,对调控负荷进行排序,结果如表2所示。
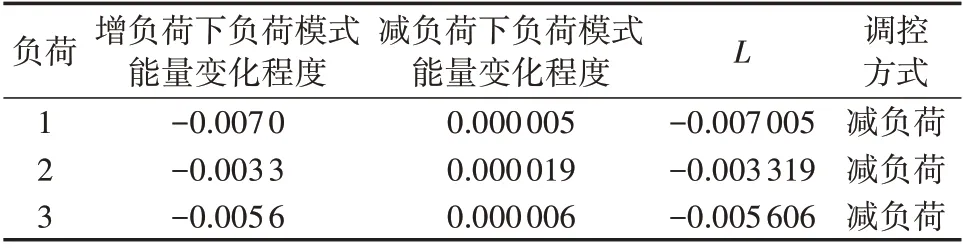
表1 3机9节点负阻尼系统低频振荡评价指标Table 1 Low-frequency oscillation evaluation index of 3-machine 9-bus negative damping system
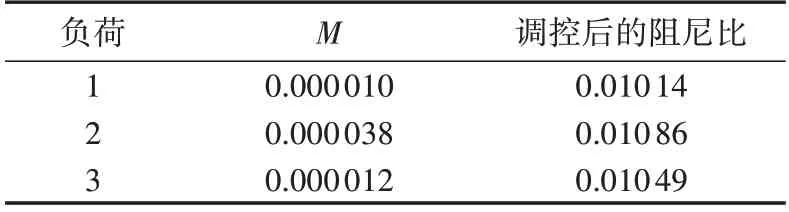
表2 3机9节点负阻尼系统负荷灵敏度Table 2 Load sensitivity of 3-machine 9-bus negative damping system
对负荷分别减少相同的功率值ΔPL情况下,系统模式2 的模式阻尼由负阻尼提升为正阻尼,系统形态由不稳定变为稳定,证明了所提出基于负荷模式能量的低频振荡评价指标对负荷控制方式选择的正确性。按负荷灵敏度指标进行排序如下:负荷2 >负荷3 >负荷1。调整负荷后系统阻尼比改善顺序为:负荷2>负荷3>负荷1。这验证了所提基于负荷模式能量的负荷灵敏度指标能够准确地对负荷进行筛选和排序,针对所需调控的模式下,负荷2 为系统中灵敏度最高的负荷,通过调控该负荷可实现对振荡的有效抑制。
3.1.2 弱阻尼系统
在3 机9 节点系统中同步机采用经典二阶模型并考虑阻尼系数,系统小干扰计算结果见附录A 表A3,通过仿真得到模式2 下各个节点负荷模式能量见附录A图A7。
选定模式2 为所要调控的模式,根据负荷模式能量计算低频振荡评价指标,如表3所示。
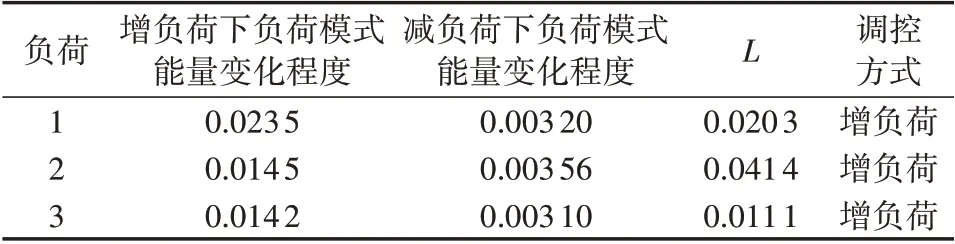
表3 3机9节点弱阻尼系统低频振荡评价指标Table 3 Low-frequency oscillation evaluation index of 3-machine 9-bus weak damping system
按照低频振荡评价指标可以判断出增负荷有助于改善系统小干扰稳定特性。对处于不同位置的负荷分别增加相同有功功率增量,取ΔPL=0.5 p.u.,根据负荷模式能量变化程度计算负荷灵敏度,对可调控负荷进行排序,结果如表4所示。
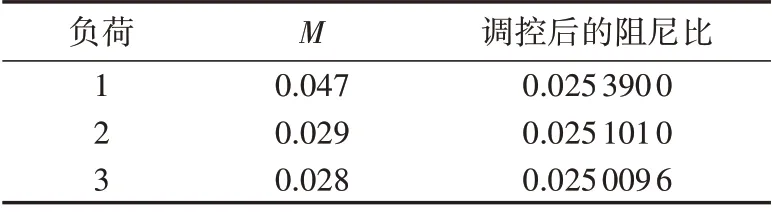
表4 3机9节点弱阻尼系统负荷灵敏度Table 4 Load sensitivity of 3-machine 9-bus weak damping system
分析表4 中数据可知,在上调相同的功率值后,按负荷灵敏度指标进行排序如下:负荷1>负荷2>负荷3。调整负荷后系统阻尼比改善顺序为:负荷1>负荷2>负荷3。这验证了所提基于负荷模式能量的负荷灵敏度指标能够准确地对负荷进行筛选和排序,针对所需调控的模式下,负荷1 为系统中灵敏度最高的负荷,通过调控该负荷可实现对振荡的有效抑制。
模式2 下系统阻尼比仅为0.024 050,不满足系统临界阻尼的要求。针对3 个负荷进行多轮次调节,由于负荷有功数值较小,采取每一轮对各个负荷均增加相同的负荷功率值,取ΔPL=0.5 p.u.。系统弱阻尼模式2 阻尼大于0.03 时调控结束,调控过程如表5所示。表中调控量为标幺值,后同。
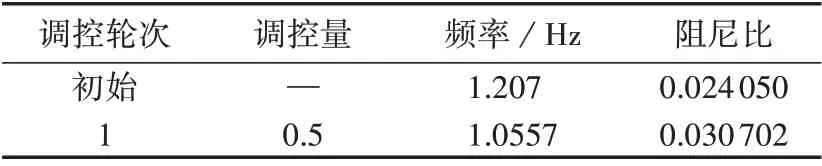
表5 3机9节点弱阻尼系统调控过程Table 5 Control process of 3-machine 9-bus weak damping system
1轮调控结束后,系统模式2阻尼比由0.024050提升至0.030 702,调控结束,验证了所提出的调控策略的可行性。
3.2 16机68节点系统
为研究负荷对系统区域间振荡的影响,采用可被划分为5 个区域的16 机68 节点系统进行仿真验证,系统接线图见附录A 图A8。各节点负荷均采用恒阻抗模型,同步发电机采用经典同步机并考虑阻尼系数,系统小干扰计算结果见附录A 表A4。其中阻尼比最弱的区域间模式为模式1,振荡模式阻尼比仅为0.028 29,参与振荡的机组为{G14,G16}与{G15}。
3.2.1 负荷低频振荡评价指标以及灵敏度验证
在区域间振荡模式1 下进行仿真得到各个节点负荷的模式能量曲线见附录A 图A9。分别对每一个负荷计算在增功率与减功率2 个状态下负荷模式能量,得到各个负荷在2 种状态下负荷模式能量的变化程度,见附录A图A10和图A11。
基于2 种状态下负荷模式能量变化程度计算低频振荡评价指标,通过评价指标来选择每一个负荷的控制方式,为了能够更清晰地表示负荷的调控方式而忽略不同负荷之间负荷模式能量的数量级差别的影响,对计算得到的低频振荡评价指标进行如下处理:
对处理后的低频振荡评价指标进行计算,计算结果见附录A 图A12。按照负荷的低频振荡评价指标可以判断通过负荷改善系统小干扰稳定特性的控制方式为减少负荷功率。对系统负荷减少有功功率增量为0.5 p.u.,并计算该负荷灵敏度,35 个负荷灵敏度指标见附录A 图A13,对于单个负荷调控后系统模式1阻尼比变化见附录A图A14。
由负荷灵敏度指标分布以及单个负荷调控后主导模式阻尼比增量变化趋势可以得出:对于影响系统小干扰特性的敏感负荷主要体现在负荷23 上,即16 机系统的区域E 负荷群中,与模式1 振荡分群结果具有一致性。
选取负荷灵敏度最高的前5 名分析其调整后阻尼比的增量如表6所示。

表6 16机68节点系统负荷灵敏度排序Table 6 Load sensitivity ranking of 16-machine 68-bus system
根据表6 可以得出在调控相同的功率值ΔPL时,按照灵敏度指标进行排序前5 名为:负荷23>负荷22>负荷21>负荷26>负荷20。在调控相同的功率值ΔPL时,通过阻尼比计算得出调整负荷后系统阻尼比改善顺序为:负荷23>负荷22>负荷21>负荷26>负荷20。这验证了所提基于负荷模式能量的负荷灵敏度指标能够对负荷进行筛选和排序,其中区域E中负荷23为灵敏度最高的负荷。
3.2.2 负荷调控策略验证
模式1 下系统阻尼比仅为0.028 29,不满足系统临界阻尼的要求。基于灵敏度排序中选择灵敏度最高的前5 个负荷作为调控对象,针对调控对象进行多轮次调节,每一轮对所调控的负荷均减少相同的功率值ΔPL=1.0 p.u.。为了尽可能地维持系统的稳定减少负荷的切除,在负荷功率不满足1.0 p.u.时不再进行调节,按灵敏度排序对下一个负荷进行调节。系统区域间振荡模式1 阻尼大于0.03 时调控结束,调控过程如表7所示。
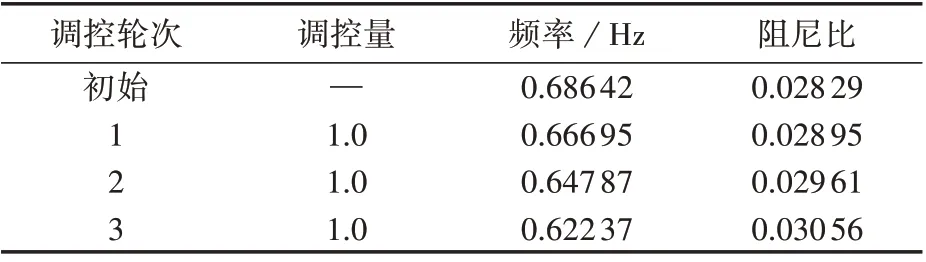
表7 16机68节点系统调控过程Table 7 Control process of 16-machine 68-bus system
3轮调控结束后,系统区域间振荡模式1下阻尼比由0.02829提升至0.03056,调控结束,验证了所提调控策略的可行性。
4 结论
本文从负荷模式能量角度分析电力系统小干扰稳定问题,并提出了基于负荷模式能量的电力系统低频振荡调控策略,得到如下结论:
1)从负荷模式能量的角度评价了各个振荡模式对系统小干扰稳定的影响,可同时对主要振荡模式进行提取;
2)提出了基于负荷模式能量低频振荡评价指标和负荷灵敏度指标,能够正确地选择负荷控制方式并对负荷进行排序,负荷灵敏度指标的计算结果受系统区域间振荡的影响,与区域间振荡的振型保持一致性;
3)提出了基于负荷模式能量的电力系统低频振荡调控策略,该策略对于区域间振荡可以有效提升模式阻尼特性并抑制振荡,通过仿真验证了该策略的有效性。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
现代电力(2022年2期)2022-05-23
理财周刊(2022年4期)2022-04-30
昆明医科大学学报(2022年1期)2022-02-28
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
Journal of Geriatric Cardiology(2021年1期)2021-03-03
南京大学学报(数学半年刊)(2020年1期)2020-03-19
学苑创造·A版(2020年12期)2020-01-07
中国外汇(2019年15期)2019-10-14
北方工业大学学报(2019年5期)2019-03-30