轨道车辆二系悬挂参数半主动控制仿真分析*
2022-07-25 03:00张成功刘志盛
机械研究与应用 2022年3期
张成功,刘志盛,向 勇
(1.中车青岛四方机车车辆股份有限公司,山东 青岛 266000; 2.中车成都机车车辆有限公司,四川 成都 610095)
0 引 言
随着铁路客车运行速度提高,若牵引电机功率不变,则致使牵引力降低。牵引力降低后,导致车辆在相同重量下,爬坡能力降低。为了保证其爬坡能力等指标满足要求,可通过降低车辆自重,采用结构轻量化理念实现高速化。同时,轻量化在整个服役期间可节省大量能源,降低运营成本。
轻量化致使车体刚度降低,振动频率和振幅增大,高速化导致轮轨冲击加剧,使得车体振动加剧(特别是横向振动),恶化车辆运行平稳性、乘坐舒适性。目前,通过改善列车振动获得较好的振动性能已成为铁道车辆工作者争相研究的热点。GN Sarma,F Kozin等提出了悬挂系统主动控制方法,宋雨等对车辆的悬挂参数进行了半主动控制研究。研究表明:采用主动、半主动控制对改善车辆运行平稳性和舒适性效果明显[1,4]。
笔者针对车辆高速化、轻量化导致车体振动加剧、运行平稳性降低、乘坐舒适性恶化等问题,通过Simpack建立动力学仿真模型、Simulink搭建模糊半主动控制器,实施联合仿真对二系悬挂参数(阻尼值)进行半主动控制优化,得出优化后的阻尼力能够适应性地衰减车体振动,提高车辆运行的平稳性、乘坐舒适性指标,从而提升车辆的运行品质。
1 半主动控制策略
半主动控制可以通过控制策略调节车辆悬挂系统阻尼参数,在车辆运行过程中,优化阻尼力,调解减振器的输出力,抑制车辆振动加速度,可以提高车辆运行平稳性、舒适性指标。
本文将模糊控制理论和可调型半主动控制相结合,实现连续性半主动控制[2-3]。车辆与构架半主动阻尼悬挂系统可简化,如图1所示。
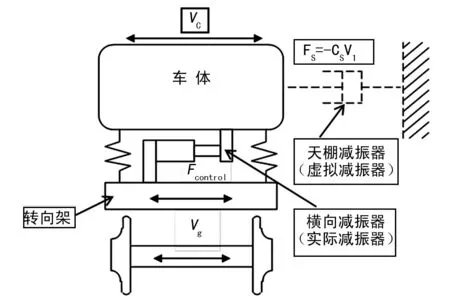
图1 车辆半主动阻尼悬挂系统简图
图1为车辆系统半主动阻尼悬挂系统简图,相对应的半主动悬挂系统所产生的力如式(1):
Fcontrol=-ccontinuous(vc-vg)
(1)
式中:vc为车体振动速度;vg为构架振动速度;vr=(vc-vg)为车体与构架的横向相对振动速度;k为悬挂系统刚度;ccontinuous为半主动控制阻尼;m为车体的质量。
(2)
式(2)为连续可调半主动悬挂阻尼。
结合图1、式(1)、(2)可得车体横向振动(垂向振动相似,不再赘述)。
(1) 当vc(vc-vg)<0时,车体的横向振动有向左和向右两种:①当车体向右运动时,构架的速度vg大于车体的速度vc,减振器的运动方向与车体的运动方向相同,如果阻尼系数大则车体的振动加大,此时应选择最小的阻尼cmin,此时输出的阻尼力为Fmin=-cmin(vc-vg);②当车体左向运动时,构架的速度vg小于车体的速度vc,减振器的运动方向与车体的运动方向相同,如果阻尼系数大同样会引起车体的振动加大,此时应选择最小的阻尼cmin,此时输出的阻尼力为Fmin=-cmin(vc-vg)。
依据上述可得:当车体的速度vc和车体与构架的相对速度vr异号时,悬挂系统减振器取得最小阻尼Fmin=-cmin(vc-vg)。
(2) 当vc(vc-vg)>0时,同时也有两种情况:①当车体的速度vc和车体与构架的相对速度vr都为负数时,用模糊控制器1(fuzzy control1)实现控制;②当车体的速度vc和车体与构架的相对速度vr都为正数时,用模糊控制器2(fuzzy control2)实现控制。
综上几种情况,文中将连续型半主动悬挂系统阻尼可分为以下挡位。
2 模型建立
2.1 车辆动力学模型
基于Simpack,建立多自由度动力学模型,车体5个自由度(点头运动、侧滚运动、摇头运动、沉浮运动及横移运动)、构架4个自由度(点头运动、侧滚运动、摇头运动、沉浮运动及横移运动)、轮对4个自由度(侧滚运动、摇头运动、沉浮运动及横移运动)。一系悬挂、二系悬挂(空气弹簧、抗蛇行减振器、垂向减振器、横向减振器、横向止挡及牵引拉杆)系统建模采用弹簧及阻尼的等效[4],动力学模型如图2所示。
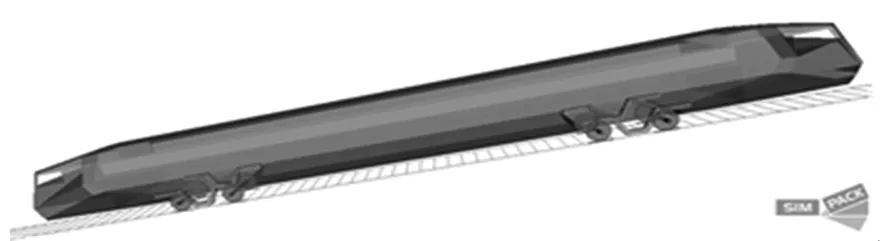
图2 车辆动力学模型
2.2 半主动控制器
模糊逻辑控制器输入变量分别为车体前、后端减振器所处位置的速度及转向架与车体的相对速度,输出变量为减振器的可调阻尼[4]。
以仿真计算获取车体前、后端速度及转向架与车体的相对速度范围为依据,建立模糊逻辑控制器1(fuzzy control1)、2(fuzzy control2)的输入、输出论域范围,控制器1(fuzzy control1)输入论域范围分别为[-0.1,0]和[-0.1,0],控制器2(fuzzy control2)输入论域范围分别为[0,0.1]和[0,0.1],两控制器输出的论域范围均为[0.06,1]。量化因子和比例因子以函数调解的方式给出。输入、输出的隶属度函数采用三角形和曲线分布两种混合而成。
文中根据专家经验法选取fuzzy control 1和fuzzy control 2模糊规则,如表1、2所列。

表1 fuzzy control 1规则

表2 fuzzy control 2规则
输入变量、输出变量的隶属度函数关系如图3所示。
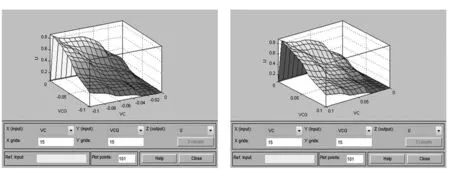
图3 函数fuzzycontrol 1、fuzzycontrol 2隶属度关系
2.3 控制系统模型
在Simpack中建立车辆多体动力学模型、 Matlab/Simulink中建立模糊控制器,通过Simpack和Matlab/Simulink之间数据交换,实施联合仿真[5-9],如图4所示。

图4 控制系统图
垂向控制中,将$F_force_RR、$F_force_RL、$F_force_LR、$F_force_LL四个半主动控制阻尼力分别施加到垂向减振器,通过控制系统计算车辆减振器所需的阻尼力起减振作用,如图5所示。

图5 垂向控制单元
横向控制中,将$F_force_QQ、$F_force_QH、$F_force_HQ、$F_force_HH四个半主动控制阻尼力分别施加到横向减振器,通过控制系统计算车辆减振器所需的阻尼力起减振作用,如图6所示。
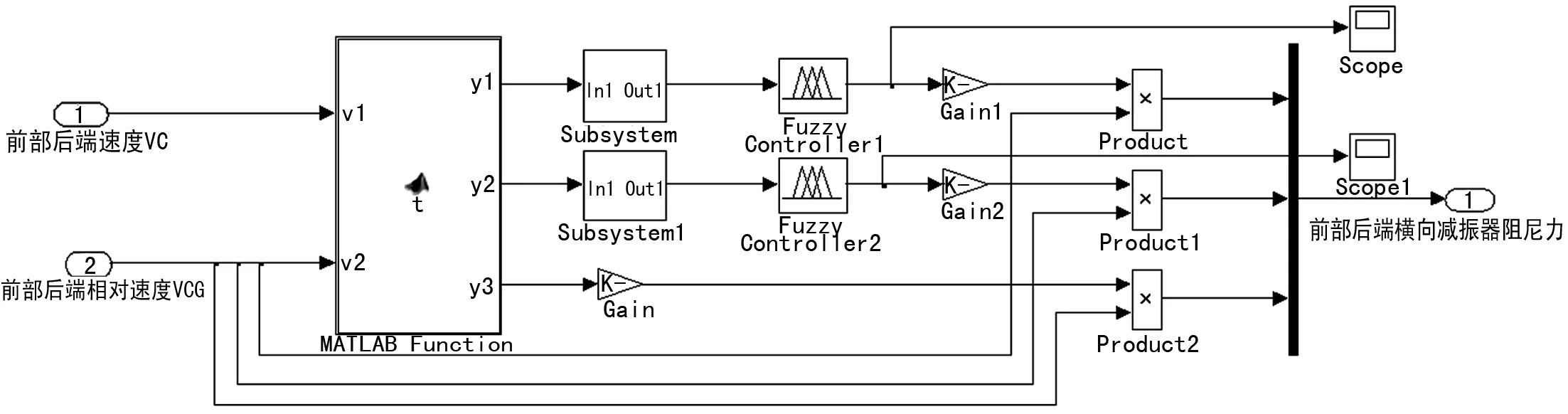
图6 横向控制单元
3 仿真结果
采用德国低干扰谱作为线路不平顺输入激励,将车体中部重心位置作为采样点,测得车体横向、垂向振动加速度,利用采样点的加速度对车体动力学特性进行比较分析、计算,仿真过程中采样频率设为256 Hz,仿真参考时间为20 s。
3.1 加速度分析
在被动、模糊半主动控制工况下,选取车体横向、纵向加速度,具体如图7及表3所列。
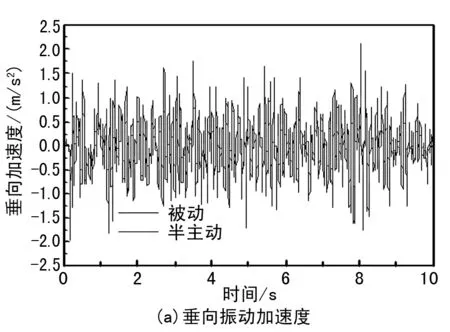
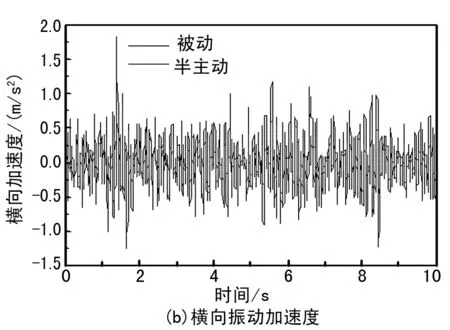
图7 车体纵向、横向加速度时域图
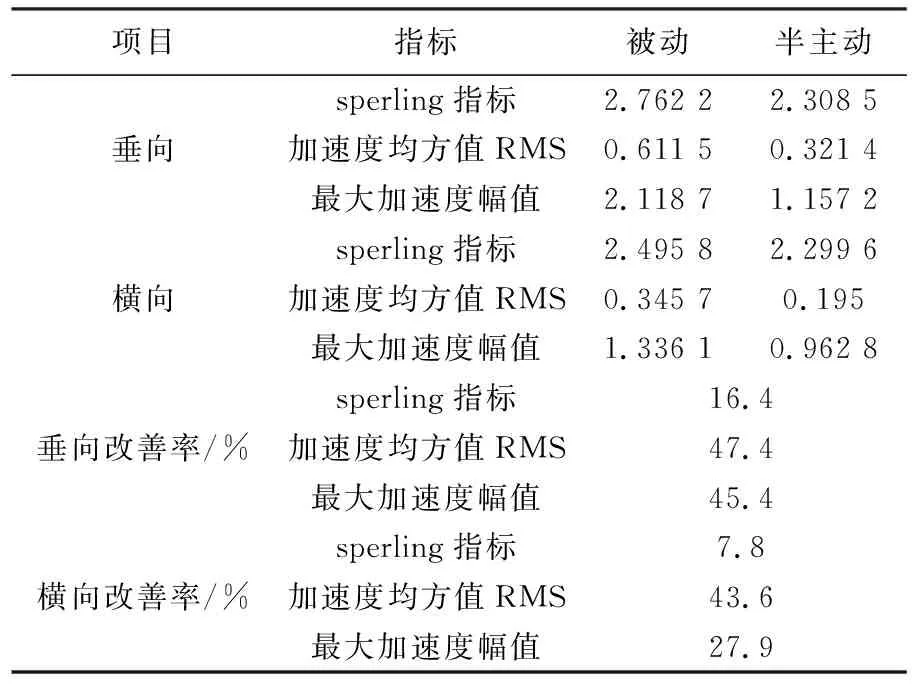
表3 控制对比分析
依据表3:垂向控制中,sperling指标提升16.4%,加速度均方值RMS降低47.4%,最大加速度幅值降低45.4%;横向控制中,sperling指标提升7.8%,加速度均方值RMS降低43.6%,最大加速度幅值降低27.9%。
3.2 典型工况分析
车辆运行过程中,车体垂向振动、横向振动关键自由度包括车体的点头、侧滚、摇头、沉浮及横移,通过改善车体在上述5个关键自由度下的振动位移,可以提升车辆的运行品质。在半主动控制下,车辆运行时沉浮、摇头、点头、横移、侧滚位移与被动工况下的位移对比如图8所示。
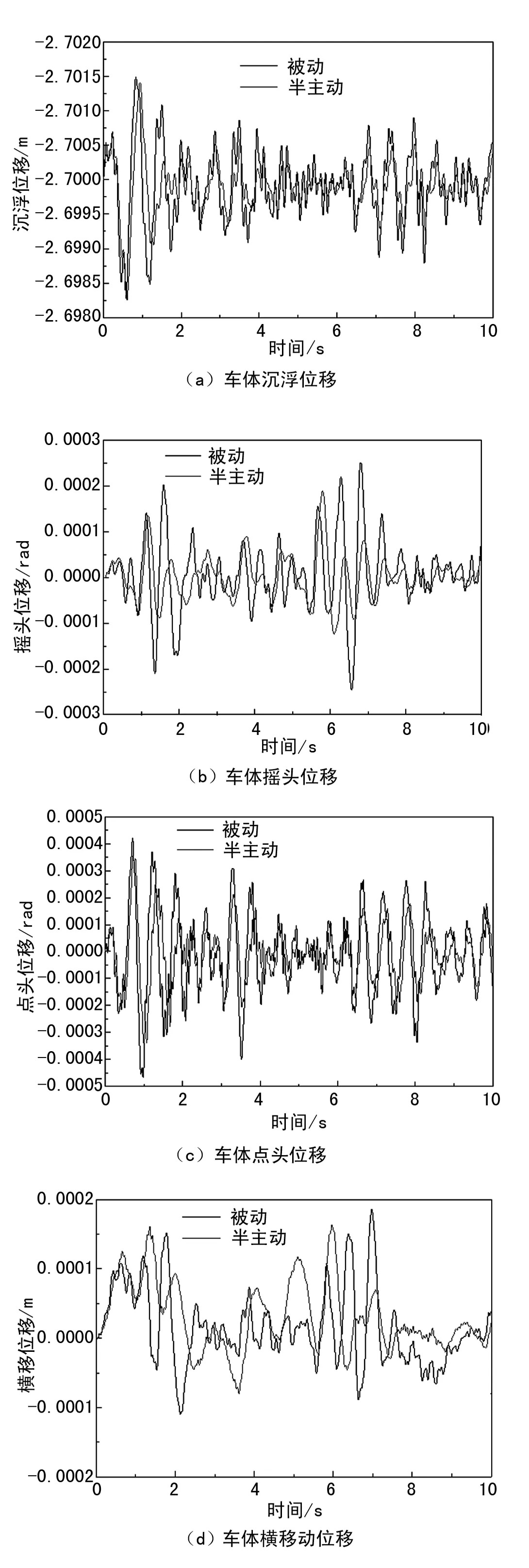
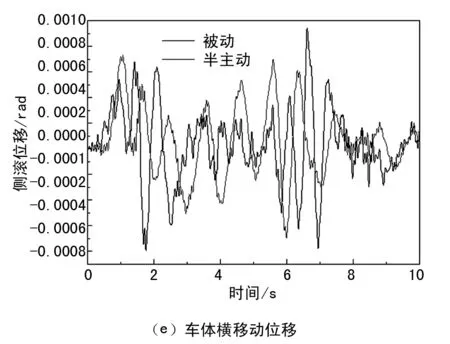
图8 车体典型工况位移图
从车辆典型振动工况对比分析半主动控制对车体振动改善情况:车体侧滚振动位移最大幅值改善率为22.3%,车体摇头振动位移最大幅值改善率为28%,车体点头振动位移最大幅值改善率为23.9%,车体沉浮振动位移最大幅值改善率为11.3%,车体横移振动位移最大幅值改善率为9.2%。
总体来看:模糊半主动控制后车体点头、侧滚和摇头振动位移最大改善率较高,车体沉浮和横移振动位移最大改善率较低,但对车辆运行平稳性和舒适性改善均有一定贡献。
4 结 语
采用Simpack建立车辆动力学模型,通过分析车辆运行过程中车体与行走部问相对运行关系,策划模糊控制规则,建立模糊控制器,实现智能控制方法(模糊控制)与开关控制相结合的连续半主动控制器。
通过将车辆振动数据传输到半主动控制器中,对二系悬挂参数(阻尼值)进行优化,以力的形式反馈给车辆,解决了车辆运动过程中阻尼力与车辆振动衰减不匹配问题,实现阻尼力对横向、垂向振动的适应性衰减,从而提高了车辆运行的平稳性、乘坐舒适性等指标,对今后车辆的运行品质的提升具有一定的参考价值和现实意义。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
军民两用技术与产品(2021年1期)2021-07-28
电子技术与软件工程(2021年10期)2021-07-05
广西科技大学学报(2021年1期)2021-03-15
北京理工大学学报(2020年11期)2020-12-15
铁道通信信号(2020年6期)2020-09-21
物理通报(2019年11期)2019-11-07
科学与财富(2017年12期)2017-05-16
汽车技术(2017年4期)2017-04-26
汽车工程学报(2015年6期)2016-03-23