
基于TRIZ的冷凝器清洗机器人创新设计
2022-07-27 02:40王成军李家宝
包装工程 2022年13期
王成军,李家宝
工艺与装备
基于TRIZ的冷凝器清洗机器人创新设计
王成军,李家宝
(安徽理工大学 人工智能学院,安徽 淮南 232001)
针对目前清洗设备工作效率低和成本高等问题,设计出一种基于矛盾冲突理论和物–场模型的高效率冷凝器清洗机器人。通过TRIZ系统组件分析和因果轴问题分析,找出冷凝器清洗机器人的有效功能和不足功能;运用TRIZ的技术矛盾理论、物理冲突理论以及物–场分析得出针对上述原因的解决方案。最终创新设计出了基于混联机构的多喷枪协同式冷凝器清洗机器人,并制作了实物样机进行测试。与传统机器人相比,该创新设计的机器人节省维修工时76%,节约成本约25%。结果表明,该清洗机器人能克服现有技术的缺陷,在结构刚度、运动精度、灵活性和作业效率均得到提高,并降低了劳动强度和人力成本。
冷凝器清洗;TRIZ理论;矛盾冲突理论;冷凝器清洗机器人
冷凝器作为电厂、石化等工业领域的大型关键设备,由于热交换时伴随化学反应等原因,设备运行时产生的污垢会降低传热效能,增加动力装置的耗功率,减少换热器的使用寿命,甚至造成严重事故[1]。因此,高效率冷凝器清洗机器人的研究对冷凝器的清洗维护和工业生产安全提供有力保障[2]。
关于冷凝器清洗的诸多问题,许多研究者也提出了一些技术实施方案。StoneAge公司研发一种名为Bundle Blaster的清洗装置[3],基于液压喷枪进行清洗工作,采用可调节的“A”字定位框架,可自行停止运动。刘国华[4]设计了一种热定型机冷凝器的自动除尘清洁装置,使胶球在进口处实现分流加速,减少进口端的堆积,提高了对冷凝管管内壁的清洁处理。闫顺林等[5]设计了一种圆柱形装置投球,利于胶球快速通过投球装置进入冷却管,提高了对冷凝管管内壁的清洁处理;夏汉民等[6]设计了一种利用高压水射流对冷凝器进行清洗的机器人,主要由履带行走机构、回转支承、大臂、小臂和喷枪等部分组成,该清洗机器人采用串联式结构,无法做到多喷枪协同清洗;齐永健[7]设计了一种列管式换热器清洗装置,由1条水平设置的横向导轨和2条设置于横向导轨两端的纵向导轨组成,定位准确,但不能随意改变工作状态。代峰燕等[8]设计了一种采用同步齿形带定位的凝汽器清洗设备,结构简单,对列管式凝汽器有较好的清洗效果。上述清洗装置多为基于胶球清洗或化学清洗方式,清洗机器人多为串联式结构,针对电厂用冷凝器缺乏专用的高效清洗装置[9-10],因此,须针对冷凝器的使用需求研制高效率、高精度、高稳定性的清洗机器人。
为解决当前冷凝器清洗机器人效率低等问题,文中采用TRIZ理论对冷凝器清洗机器人进行问题分析和求解,得其最优的结构创新设计方案,并进行实验验证。
1 基于TRIZ理论的创新设计
采用TRIZ理论进行发明创造,可让使用者更加系统地对问题进行分析,转换思维视角,发现当前设计中的问题,避免传统创新方法的盲目性[11]。基于TRIZ理论建立冷凝器清洗机器人的创新设计的流程见图1。该流程遵循TRIZ理论解决工程问题的一般步骤,分析当前清洗机器人存在的问题,探求设计高效清洗机器人的矛盾冲突和解决问题创新原理,最终形成高效冷凝器清洗机器人的创新设计方案[12-17]。
2 冷凝器清洗机器人的问题分析
2.1 基于组件分析法的问题分析
冷凝器清洗机器人的功能包括分离物质、移动等,主要功能为分离物质(清洗污垢),其主要问题在于清洗效果差。针对当前问题,建立清洗机器人的组件关系模型矩阵,见图2。根据组件关系模型,通过系统各组件之间的相互关系,建立技术系统的系统功能模型,见图3。
从组件功能模型可知,现有冷凝器清洗机器人分为移动平台、回转装置、控制系统、串联工作臂、喷枪支架和喷枪系统组件,水、地面为超系统组件,冷凝器为作用对象。由系统功能模型知,通过各系统组件相互作用对冷凝器进行清洗,其中功能不足的为串联工作臂对喷枪的调姿、喷枪对冷凝器的清洗和末端支架对喷枪的固定,功能有害的为高压水射流对喷枪的反冲,水对地面的污染,地面对移动平台的支撑。
2.2 因果轴分析
因果轴分析法是因果分析法的一种,主要是通过分析问题的产生结果与原因之间的关系建立一条或多条因果关系链,发现关系链中的薄弱环节,寻找出解决问题的切入点。
对系统功能模型中不足功能与有害功能进行因果轴分析,将每个原因、结果采用对象、参数描述等3个元素进行结构化的表达,可知当前机器人清洗效率低的原因在于缺乏多自由度重载工作臂,机器人的灵活性差,喷枪的进给效率低以及数量不足。因果轴分析结果见图4。
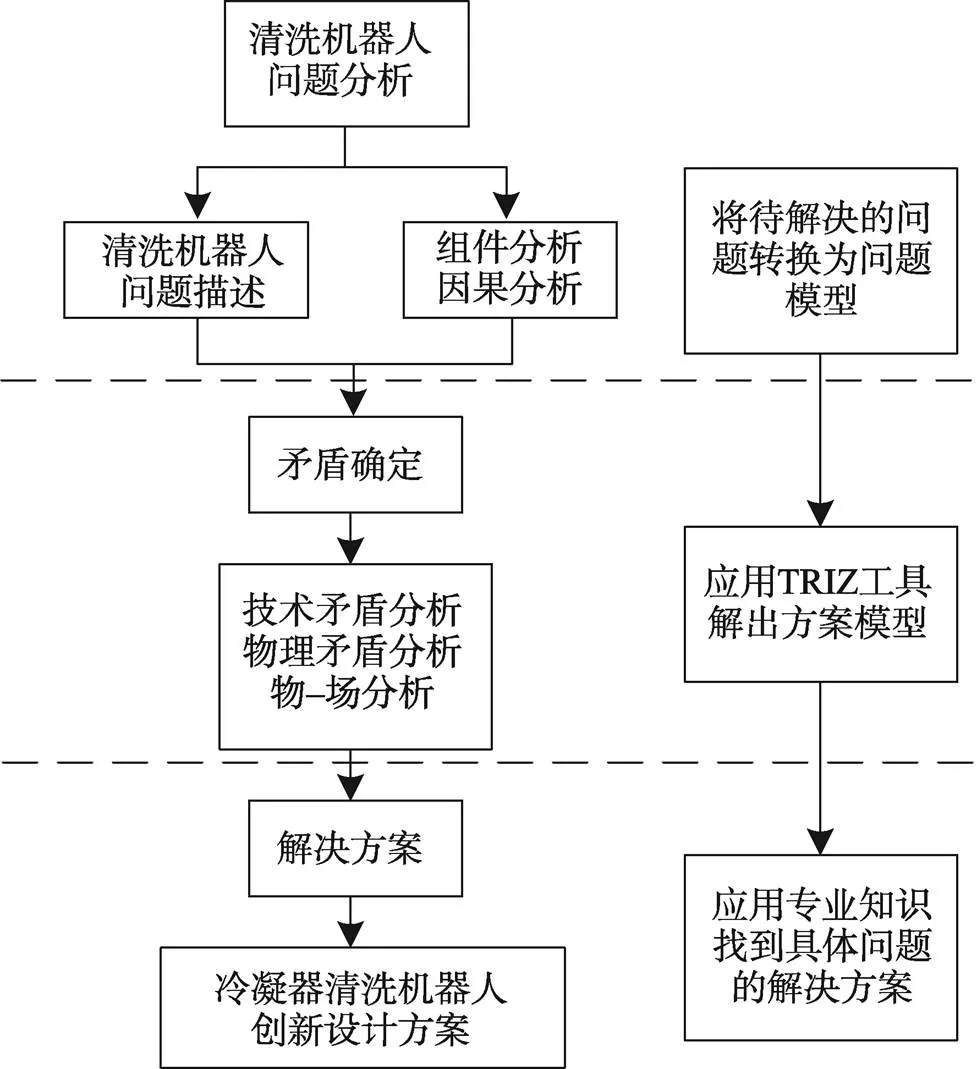
图1 基于TRIZ理论的冷凝器清洗机器人创新设计流程

图2 组件关系模型矩阵
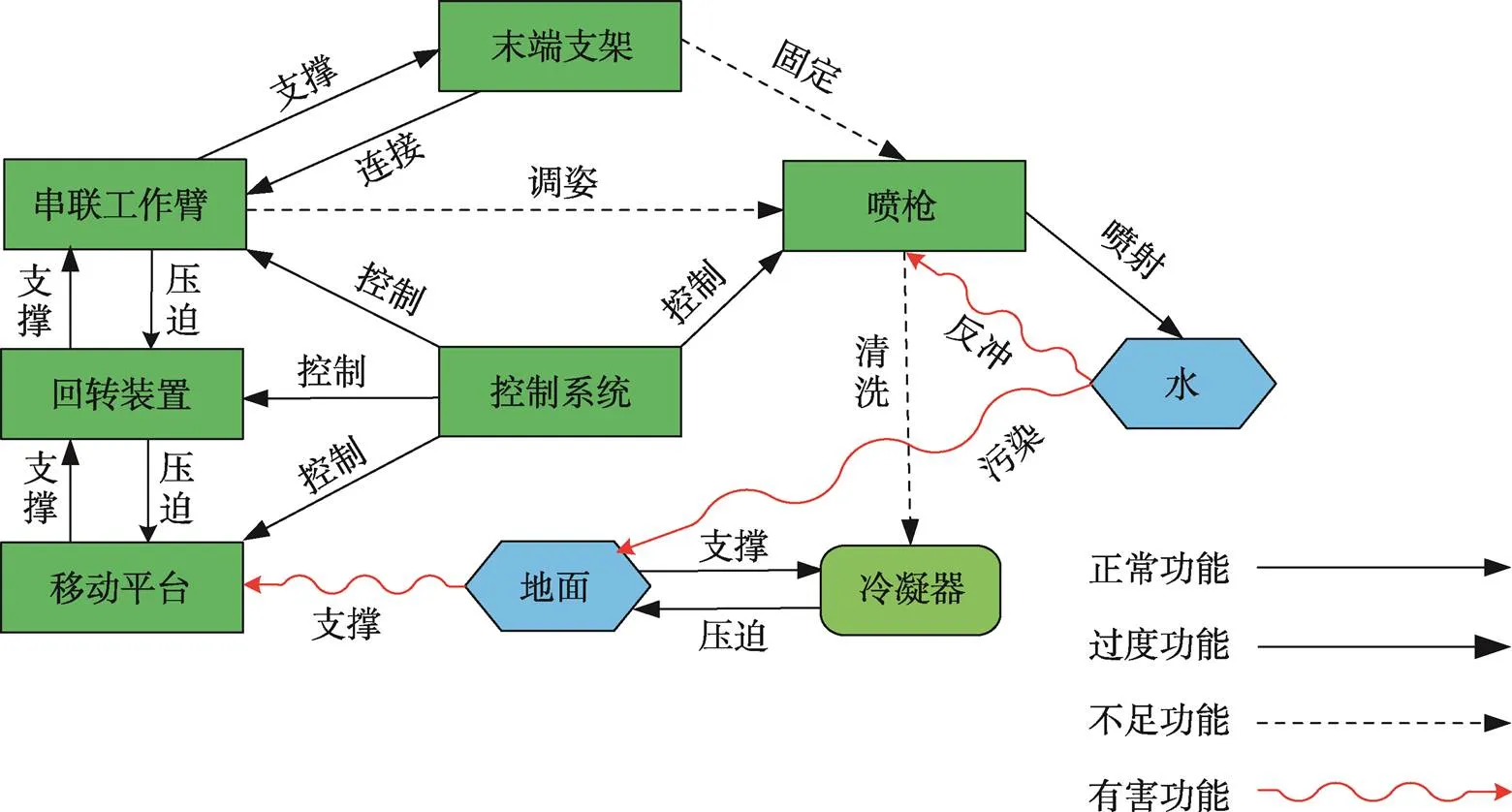
图3 冷凝器清洗机器人系统功能模型
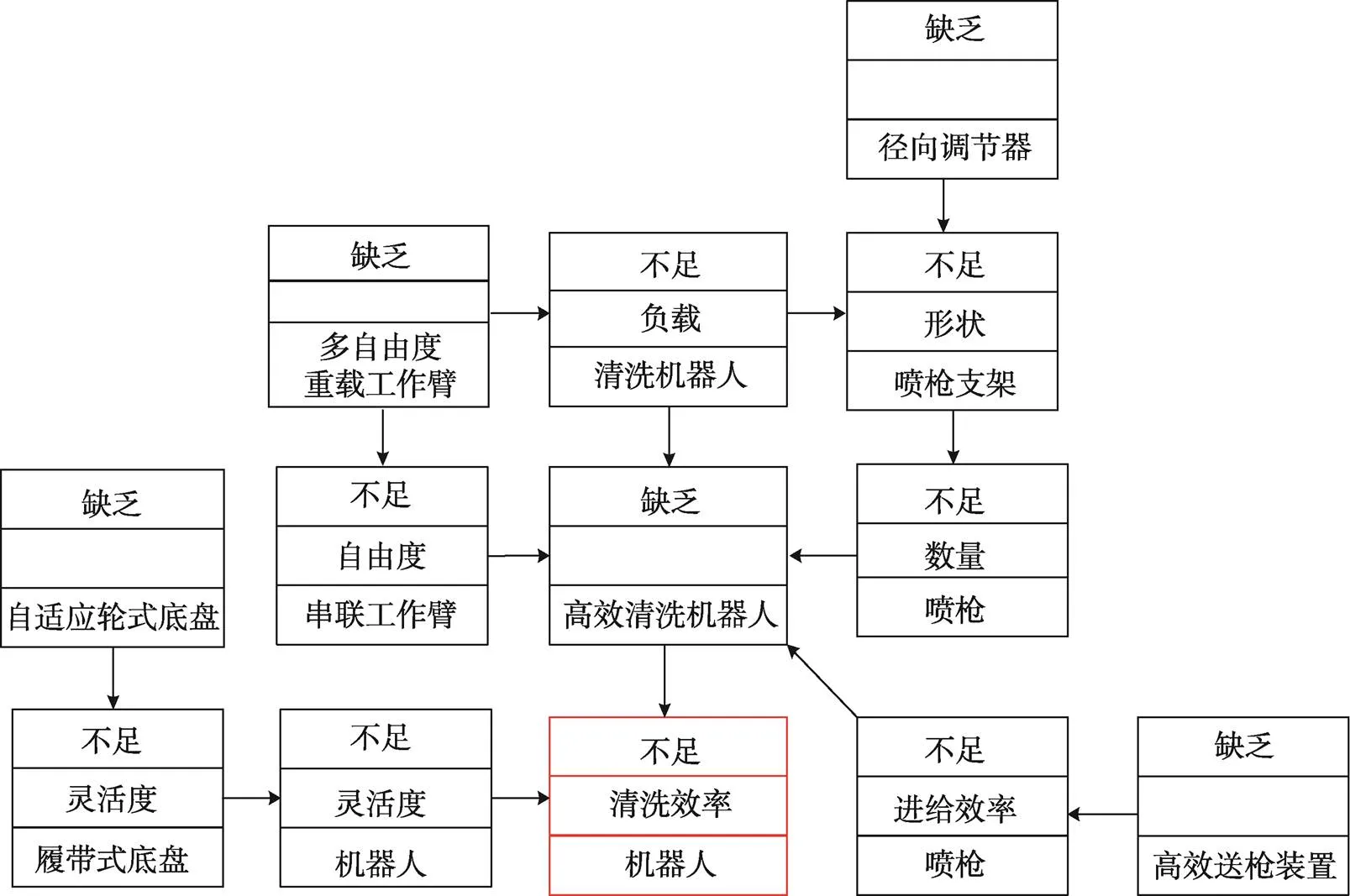
图4 因果轴分析
3 冷凝器清洗机器人的创新设计
3.1 基于“技术矛盾解决原理”
由上述分析可知,清洗机器人效率不足的原因有多种,其中对喷枪的数量不足和进给效率低运用技术矛盾理论进行问题求解。
建立冲突矩阵,因机器人清洗时末端需携带多喷枪,通过分析可总结出第1组矛盾为恶化的技术特征参数36(设备的复杂性)与改善的技术特征参数12(形状)。因机器人需设计一种高效送枪装置提高进给效率,总结出第2组矛盾为恶化的技术特征参数36(设备的复杂性)与改善的技术特征参数38(自动化程度)。故组建的矛盾为36–12和36–38[18]。
根据上述提取的通用工程参数36(设备的复杂性)、12(形状)、38(自动化程度),建立矛盾冲突矩阵,见表1。根据矛盾冲突矩阵,由组建的矛盾对应找到解决矛盾的发明原理,36–12矛盾的发明原理为[1, 15, 29],即1(分割原理)、15(动态化原理)、29(气压和液压结构原理);36–38矛盾的发明原理为[15, 24,1 0],即15(动态化原理)、24(借助中介物原理)、10(预先作用原理)。
根据高效清洗作业的要求,结合上述发明原理,对表1中的发明原理进行分析筛选,将发明原理1(分割原理)、15(动态化原理)作为解决喷枪问题的解决方案,见表2。
表1 矛盾矩阵
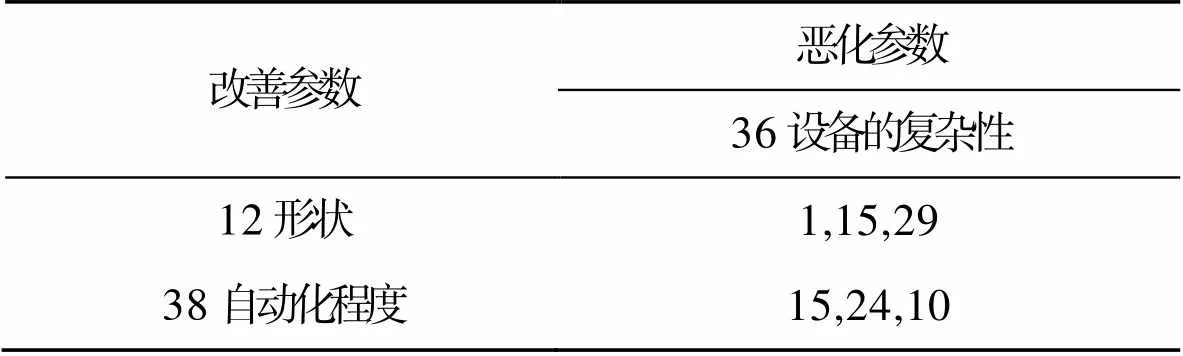
Tab.1 Contradiction matrix
表2 矛盾解决原理
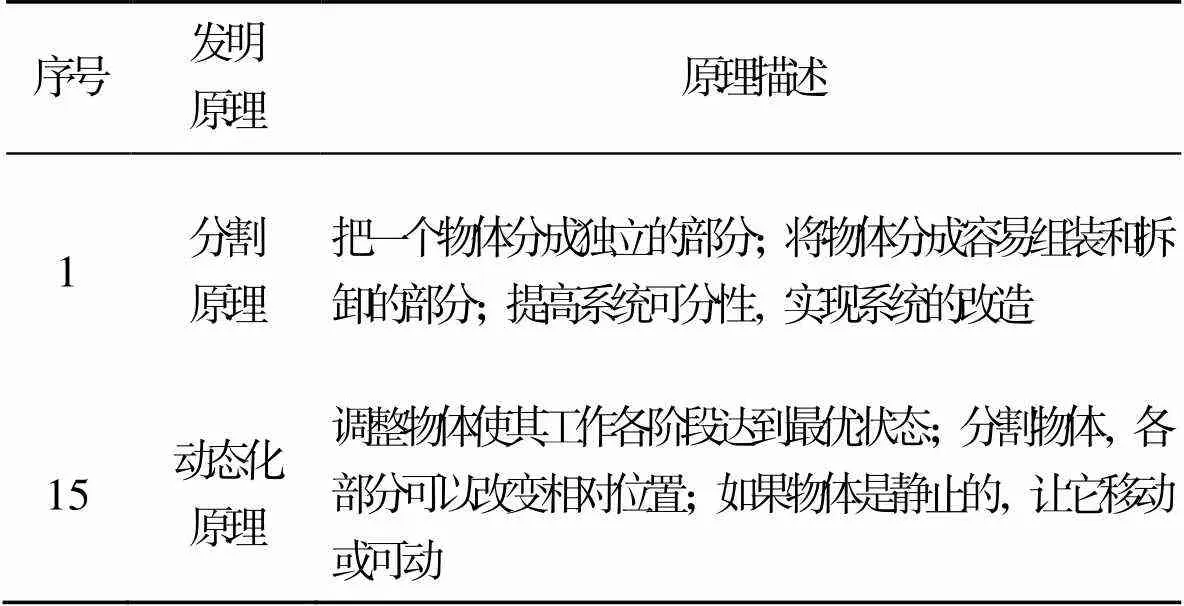
Tab.2 Principle of contradiction resolution
根据上述TRIZ发明原理及创新设计原理,采用如下的应用方案。
1)结合分割原理。将传统末端支架分割成4个带有送枪装置的径向调节器,每个径向调节器均可携带喷枪,在控制系统的作用下相互之间协调工作,改进之后的末端支架见图5。
1.专用送枪装置;2.径向调节器;3.固定支架。
2)结合动态化原理。在末端支架上安装专用送枪装置,专用送枪装置由伸缩缸、主支杆、固定夹持器、可动夹持器和支架组成,通过固定夹持器和可动夹持器协同工作,利用伸缩缸的伸缩驱动可动夹持器及高压水射流喷枪沿着主支杆运动,解决喷枪的固定、夹持,以及自动进给和退出等技术难题,实现喷枪的自动进给或撤回,提高效率,完善清洗机器人的作业功能,专用送枪装置见图6。

1.主支杆;2.可动夹持器;3.固定夹持器;4.支架;5.伸缩缸。
3.2 基于“物理矛盾解决原理”
由组件分析可知,当前地面对移动平台的支撑为有害功能,通过因果轴分析,当前的履带式底盘清洗机器人灵活性差。设计自适应轮式底盘使机器人的清洗效率提高,并解决当前的有害功能。
对设计自适应轮式底盘进行物理冲突判断,定义移动平台中的物理矛盾,其中矛盾参数为车轮数量,保持稳定性需增加车轮数量,而增加灵活性需减少车轮数量。为实现技术系统的理想状态,这个参数的不同要求可在地面凹陷处和平整处得以实现,以上2个空间不存在交叉,运用空间分离原理最终确定选用浮动支撑轮系,实现与工作现场地面的全地形接触和稳定支撑。前驱动轮系、从动轮系、后驱动轮系与板簧、连接座共同构成了移动平台的浮动支撑轮系,见图7。驱动轮系包括车轴和驱动轮。驱动轮有2个,对称安装在车轴的两端;驱动轮与车轴之间通过轴承相连接,车轴与板簧通过U型螺栓相固连,结构见图8。
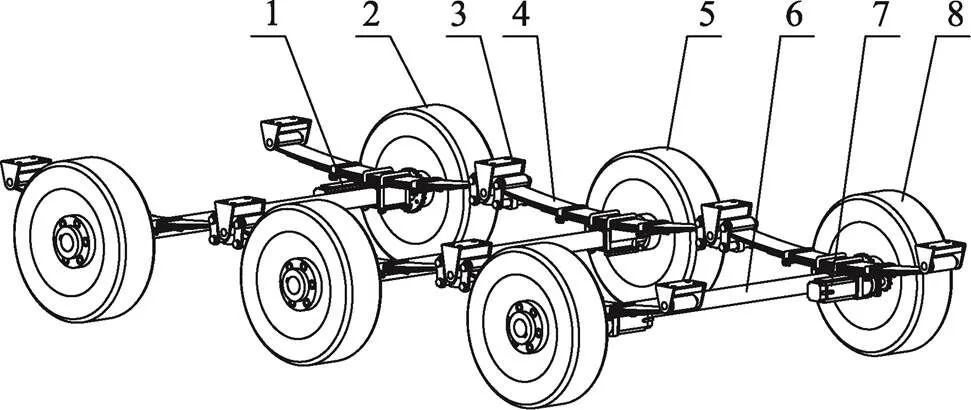
1.前驱动组件;2.前驱动轮系;3.连接座;4.板簧;5.从动轮系;6.车架;7.后驱动组件;8.后驱动轮系。
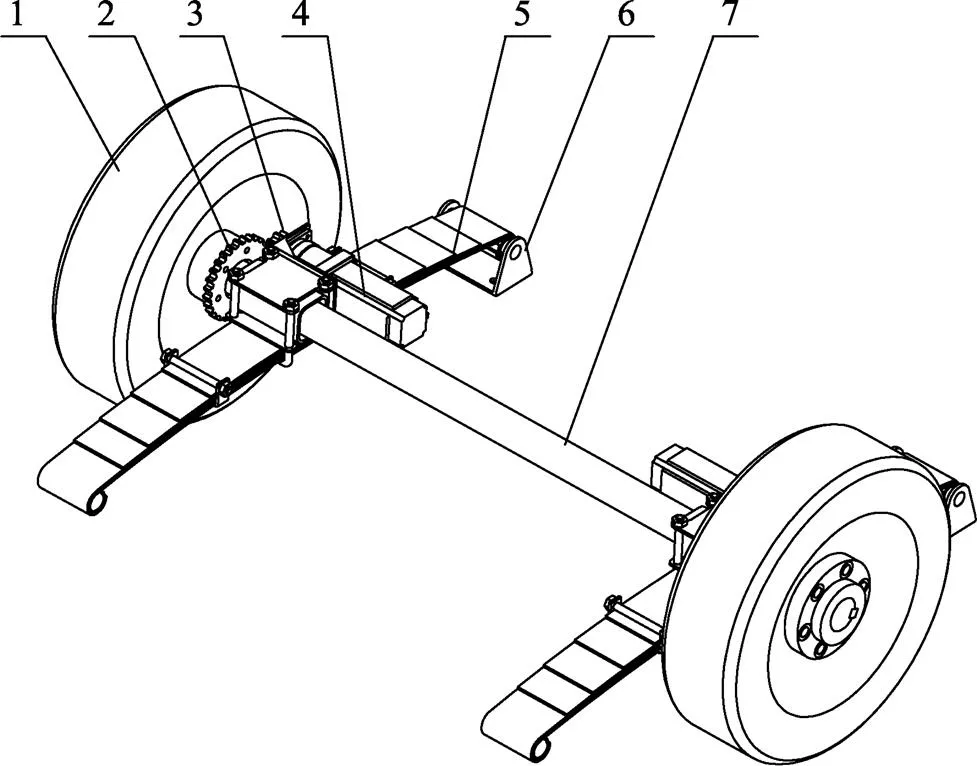
1.驱动轮;2.主动齿轮;3.从动齿轮;4.行走电机;5.板簧;6.连接座;7.车轴。
3.3 基于“物–场模型”
由系统功能分析可知,串联工作臂可对喷枪的清洗位置进行调节,串联工作臂的调姿功能有缺陷,对喷枪的反冲为有害功能。由因果轴分析可知,当前串联工作臂的自由度少,增加喷枪后清洗机器人的负载功能差,缺乏一种多自由度重载工作臂。工作臂对喷枪进行调姿,喷枪对冷凝器清洗清洗,其本质为工作臂对清洗位置的调节。建立串联工作臂与喷枪之间的物–场模型,见图9,F为机械场,S1为喷枪,S2为串联工作臂。
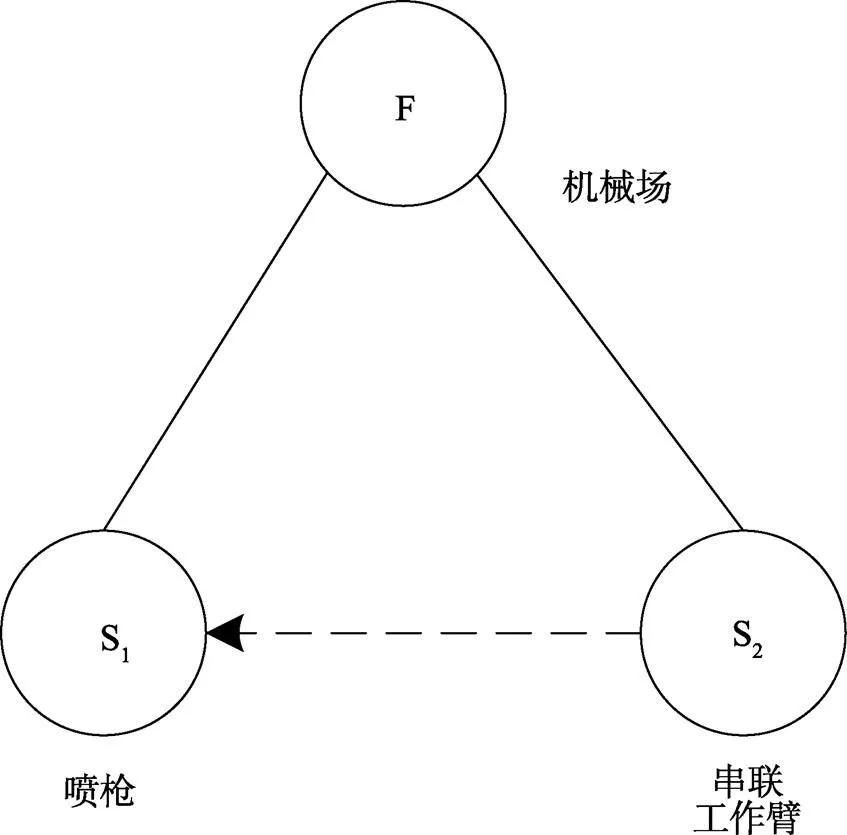
图9 串联工作臂与喷枪的物‒场模型
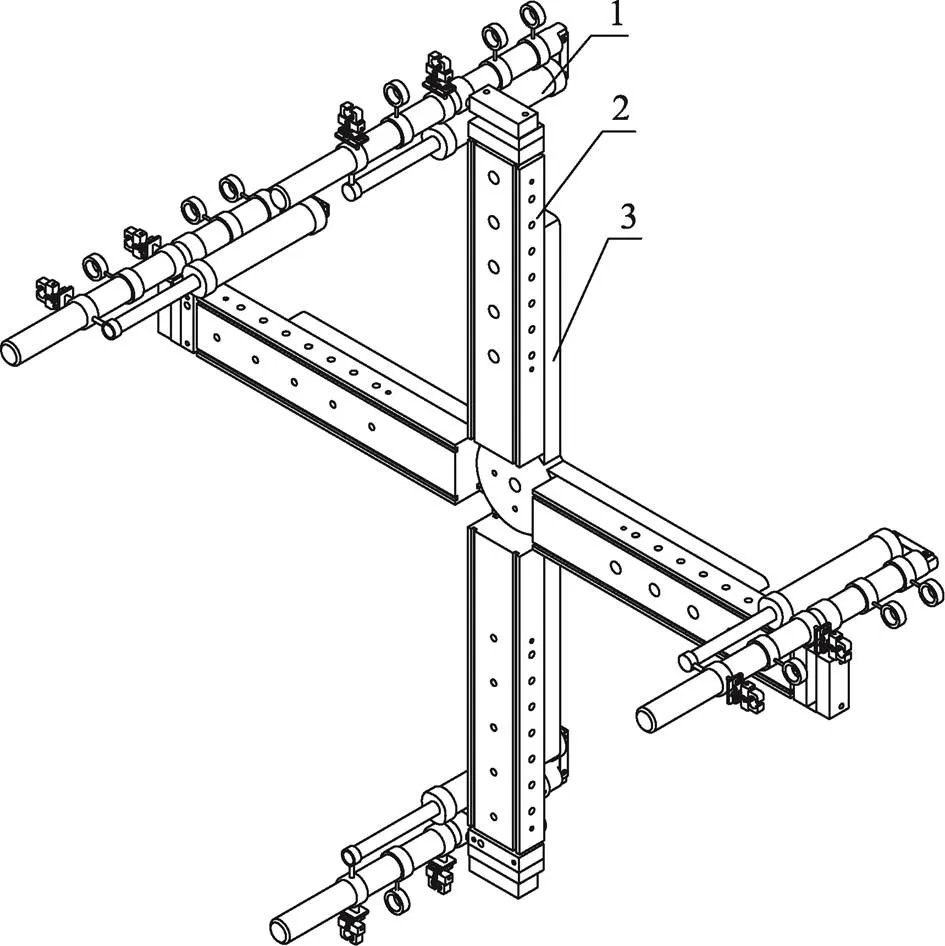
串联工作臂与喷枪之间的物–场模型所需要的3个功能元素都存在,但由于效应程度不够导致功能不能实现。实现喷枪稳定且高效清洗的关键是增加调姿机构的稳定性,故采用一般解法6:增加另一种物质S3以强化有用效应,完善效应不足的模型。将并联工作臂替代当前串联工作臂,增加机器人清洗工作时的稳定性,提高清洗精度。理想的工作臂与喷枪的物–场模型见图10。该多自由度重载工作臂主体为4–RPU并联平台,包括对称布置的4个支链、定平台和动平台,见图11。
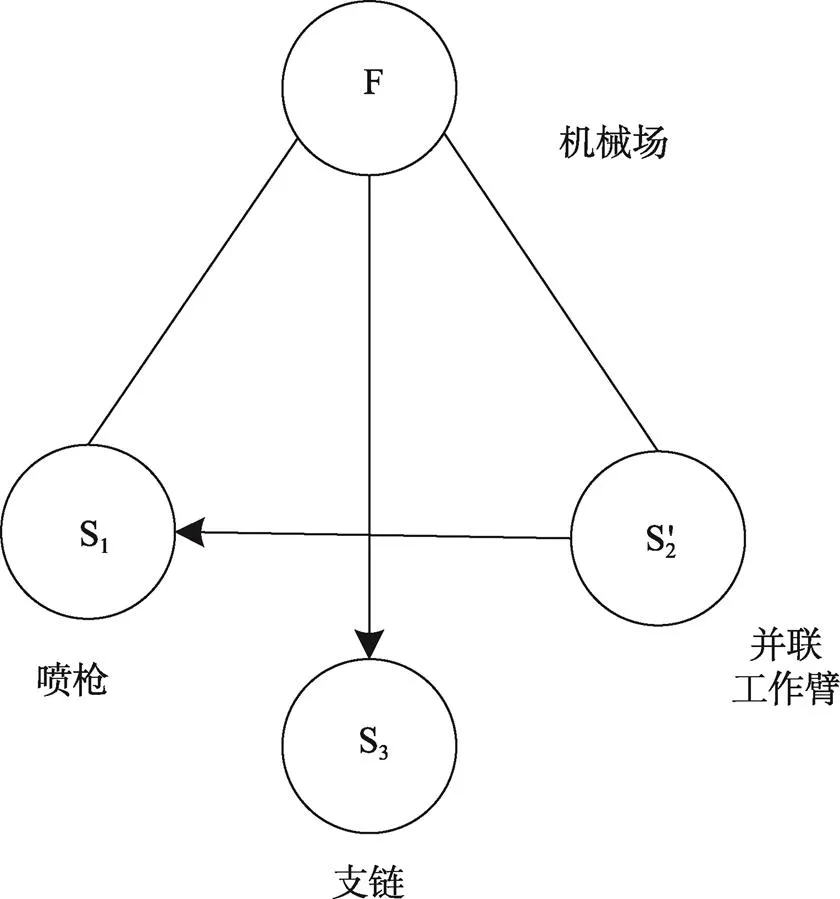
图10 理想的工作臂与喷枪的物–场模型
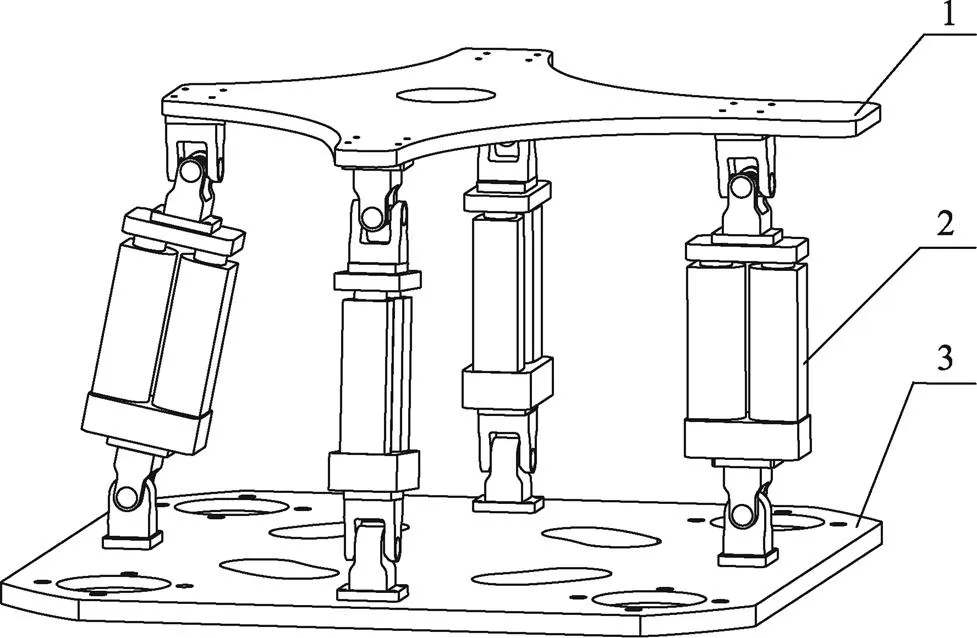
1.动平台;2.支链;3.定平台。
4 实验验证
通过上述设计得到最终方案,搭建了多喷枪协同式冷凝器清洗机器人,并委托南京绥德自动焊接装备有限公司进行样机测试,测试结果表明:该机器人并联工作臂和末端执行器可相互协调工作,完成喷枪移动、调节以及清洗等作业任务。对文中技术进行台架实验,传统机器人清洗时间为23 h,该样机清洗时间为5.4 h,节省维修工时76%,节约成本约25%。此次实验旨在测定该冷凝器清洗机器人工作的可靠性和清洗效率,为后续设计工作提供理论与实践依据。该机器人样机见图12。
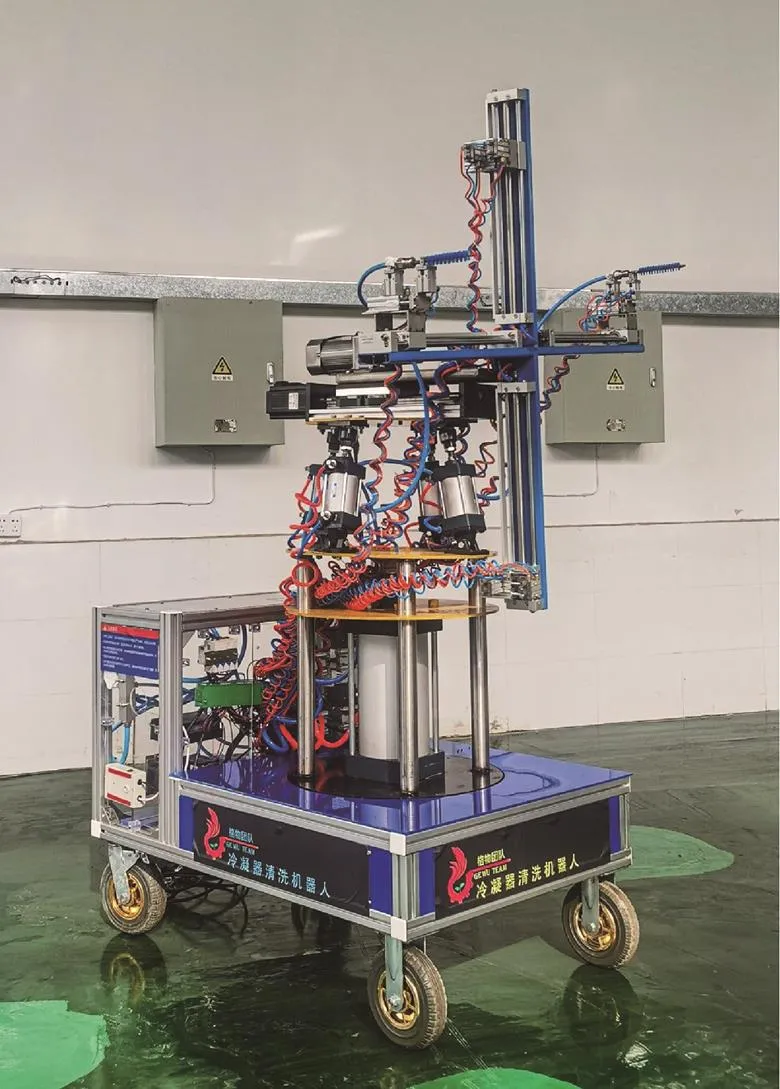
图12 高效率冷凝器清洗机器人样机
5 结语
1)基于TRIZ理论,构建出工程创新设计流程,针对当前冷凝器清洗机器人存在的缺乏多自由度重载工作臂,机器人的灵活性差、喷枪的进给效率低、喷枪的数量不足等问题,对冷凝器清洗机器人的关键部件进行设计与配置,并搭建了实物样机。
2)研制的冷凝器清洗机器人满足冷凝器高效清洗作业的需求,提高了清洗作业的效率、质量和安全性,降低了生产成本和劳动强度。该冷凝器清洗机器人的研究不仅具有一定的理论意义,而且在电厂清洗等领域具有着重要的应用价值。
[1] LUO De-yu, DONG Bing, QIN Wen-sheng. Design and Control Methods of a Condenser Cleaning Robot[J]. Chemical Engineering Transactions (CET Journal), 2017, 62: 703-708.
[2] 朱晓磊, 徐嘉叶, 张磊, 等. 凝汽器管内插转子的热力与抑垢性能研究[J]. 工程热物理学报, 2020, 41(7): 1712-1718.
ZHU Xiao-lei, XU Jia-ye, ZHANG Lei, et al. Research of Thermal and Anti-Scaling Performance of Condense Tubes with Rotor Inserts[J]. Journal of Engineering Thermophysics, 2020, 41(7): 1712-1718.
[3] 袁夫彩, 梁凯辉, 王念政, 等. 一种埋入式在线清洗冷凝管机器人设计研究[J]. 机械传动, 2018, 42(6): 81-85.
YUAN Fu-cai, LIANG Kai-hui, WANG Nian-zheng, et al. Study on the Design of an Embedded On-Line Cleaning Condenser Tube Robot[J]. Journal of Mechanical Transmission, 2018, 42(6): 81-85.
[4] 刘国华. 一种热定型机冷凝器的自动除尘清洁装置: 中国, 201821573557.4[P]. 2019–07–12.
LIU Guo-hua. An Automatic Dust Removal and Cleaning Device for Condenser of Heat Setting Machine: China, 201821573557.4[P]. 2019-07-12.
[5] 闫顺林, 李永华, 韩建, 等. 一种凝汽器清洗系统及凝汽器: 中国, 201821265912.1[P]. 2019–07–26.
YAN Shun-lin, LI Yong-hua, HAN Jian, et al. A Condenser Cleaning System and Condenser: China, 201821265912.1[P]. 2019-07-26.
[6] 夏汉民, 王耀南, 印峰, 等. 大型冷凝器清洗机器人设计及运动学分析[J]. 中国机械工程, 2014, 25(1): 103-107.
XIA Han-min, WANG Yao-nan, YIN Feng, et al. Design and Kinematics Analysis of Large Condenser Cleaning Robot[J]. China Mechanical Engineering, 2014, 25(1): 103-107.
[7] 齐永健. 一种列管式换热器清洗装置: 中国, 204944289U[P]. 2016–01–06.
QI Yong-jian. Shell and Tube Heat Exchanger Belt Cleaning Device: China, 204944289U[P]. 2016-01-06.
[8] 代峰燕, 高庆珊, 陈家庆, 等. 储油罐清洗机器人全覆盖路径规划研究[J]. 机械设计与制造, 2020(2): 263-266.
DAI Feng-yan, GAO Qing-shan, CHEN Jia-qing, et al. Research of Full Covered Path Planning for Oil Tank Cleaning Robot[J]. Machinery Design & Manufacture, 2020(2): 263-266.
[9] 闫顺林, 韩建, 曹保鑫, 等. 600 MW机组凝汽器水侧胶球清洗系统数值模拟及优化改造[J]. 汽轮机技术, 2019, 61(1): 74-77.
YAN Shun-lin, HAN Jian, CAO Bao-xin, et al. The Simulation and Structure Optimization on the Condenser Water-Side Rubber Ball Cleaning System of a 600 MW Unit[J]. Turbine Technology, 2019, 61(1): 74-77.
[10] 夏汉民, 王耀南, 印峰. 冷凝器清洗机器人动力学分析及自适应控制[J]. 湖南大学学报(自然科学版), 2013, 40(1): 49-54.
XIA Han-min, WANG Yao-nan, YIN Feng. Dynamics Analysis and Adaptive Control of Condenser Cleaning Robot[J]. Journal of Hunan University (Natural Sciences), 2013, 40(1): 49-54.
[11] 李梅芳, 赵永翔. TRIZ创新思维与方法理论及应用[M]. 北京: 机械工业出版社, 2016: 5-21.
LI Mei-fang, ZHAO Yong-xiang. TRIZ Innovative Thinking and Methods[M]. Beijing: China Machine Press, 2016: 5-21.
[12] 刘志峰, 高洋, 胡迪, 等. 基于TRIZ与实例推理原理的产品绿色创新设计方法[J]. 中国机械工程, 2012, 23(9): 1105-1111.
LIU Zhi-feng, GAO Yang, HU Di, et al. Green Innovation Design Method Based on TRIZ and CBR Principles[J]. China Mechanical Engineering, 2012, 23(9): 1105-1111.
[13] 曹卫彬, 焦灏博, 刘姣娣, 等. 基于TRIZ理论的红花丝盲采装置设计与试验[J]. 农业机械学报, 2018, 49(8): 76-82.
CAO Wei-bin, JIAO Hao-bo, LIU Jiao-di, et al. Design of Safflower Filament Picking Device Based on TRIZ Theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 76-82.
[14] 白仲航, 宋现显, 李美, 等. 基于虚拟仿真与TRIZ的产品人机工程问题解决方法研究[J]. 工程设计学报, 2020, 27(5): 541-551.
BAI Zhong-hang, SONG Xian-xian, LI Mei, et al. Research on Solving Method of Product Ergonomics Problem Based on Virtual Simulation and TRIZ[J]. Chinese Journal of Engineering Design, 2020, 27(5): 541-551.
[15] 刘晓敏, 黄水平, 陈智钦, 等. 基于TRIZ与AD的海草夹苗机械手概念创新设计及可靠性研究[J]. 机械工程学报, 2016, 52(5): 40-46.
LIU Xiao-min, HUANG Shui-ping, CHEN Zhi-qin, et al. Conceptual Innovation Design of Seaweed Planter Manipulator Based on TRIZ & AD and Reliability Analysis[J]. Journal of Mechanical Engineering, 2016, 52(5): 40-46.
[16] 王成军, 张玉平, 沈豫浙. 基于TRIZ理论的抛挂装置优化设计[J]. 机电工程, 2020, 37(9): 1115-1120.
WANG Cheng-jun, ZHANG Yu-ping, SHEN Yu-zhe. Optimization Design of Throwing Device Based on TRIZ Theory[J]. Journal of Mechanical & Electrical Engineering, 2020, 37(9): 1115-1120.
[17] 朱犇犇, 祝锡晶, 赵韡, 等. 气液两相射流清洗装置设计与仿真分析[J]. 流体机械, 2021, 49(10): 36-42.
ZHU Ben-ben, ZHU Xi-jing, ZHAO Wei, et al. Design and Simulation of Gas-Liquid Two-Phase Jet Cleaning Device[J]. Fluid Machinery, 2021, 49(10): 36-42.
[18] 刘晨敏. 基于TRIZ理论的纸盒包装机成型机构设计与分析[J]. 包装工程, 2020, 41(9): 193-198.
LIU Chen-min. Design and Analysis of the Shaping Machinery for Carton Forming Machine Based on TRIZ Theory[J]. Packaging Engineering, 2020, 41(9): 193-198.
Innovative Design of Condenser Cleaning Robot Based on TRIZ
WANG Cheng-jun, LI Jia-bao
(School of Artificial Intelligence, Anhui University of Science & Technology, Anhui Huainan 232001, China)
The work aims to design a high-efficiency condenser cleaning robot based on contradiction theory and object-field model to solve the problems of low efficiency and high cost of cleaning equipment. Through the TRIZ system component analysis and causal axis problem analysis, the effective and insufficient functions of the condenser cleaning robot were found out. The solutions to the above causes were obtained by TRIZ's technical contradiction theory, physical conflict theory and object-field model. Finally, a multi spray gun collaborative condenser cleaning robot based on hybrid mechanism was innovatively designed and the prototype was manufactured for testing. Compared with the traditional robot, the innovative robot saved 76% maintenance man hours and about 25% cost. The cleaning robot can overcome the existing technology effects, improve the structural stiffness, motion accuracy, flexibility and operation efficiency, and reduce the labor intensity and labor cost.KEY WORDS: condenser cleaning; TRIZ theory; contradiction theory; condenser cleaning robot
TP242.2
A
1001-3563(2022)13-0158-07
10.19554/j.cnki.1001-3563.2022.13.020
2021‒08‒16
国家创新方法工作专项(2018IM010500);安徽省高校协同创新项目(GXXT2019018);安徽省重点研究与开发计划(201904a05020092);安徽理工大学研究生创新基金(2021CX2146);大学生科普创新及科研育人示范项目(KYJ202101)
王成军(1978—),男,博士,安徽理工大学教授,主要研究方向为智能机械与机器人、机械产品创新设计等。
责任编辑:曾钰婵
猜你喜欢
计算机应用与软件(2022年9期)2022-10-10
中国农机化学报(2022年10期)2022-09-21
东坡赤壁诗词(2022年2期)2022-04-15
计算机与网络(2021年8期)2021-06-20
发明与创新·中学生(2021年4期)2021-04-20
舰船科学技术(2021年12期)2021-03-29
当代化工(2020年11期)2020-12-17
装备维修技术(2020年8期)2020-11-20
汽车与驾驶维修(维修版)(2019年8期)2019-09-10
化学教与学(2017年8期)2017-08-24
