5G环境下无人机在高速铁路轨道巡检中的应用
2022-07-29 04:43赵宇杰张增辉张向天赵翔彦
中阿科技论坛(中英文) 2022年7期
赵宇杰 张增辉 张向天 校 艳 赵翔彦
(西安交通工程学院,陕西 西安 710300)
目前,我国高速铁路与城市轨道交通发展迅速,为保证列车平稳运行,为乘客提供安全舒适的乘车体验,线路轨道的安全性则至关重要。近年来,纵观国内外,行车事故时有发生。例如,2020年3月5日,载有348名乘客的高速列车(斯特拉斯堡—巴黎TGV)在法国下莱茵省的安热南市(Ingenheim)和萨埃索尔桑市(Saessolsheim)之间发生脱轨事故,包括列车司机在内共有22人受伤。
多起行车事故的调查结果显示,事故发生原因是区间固定设备故障,轨道异物闯入,因灾害导致轨道异常、信息无法及时回传等。现常用的轨道巡检方法为工务段巡道工进行人工巡检,该方法耗费大量人力和工时且安全系数较低。若使用无人机巡检,以取代人工巡检,则将大幅提高线路轨道巡检的作业效率。
1 无人机应用领域
在5G环境下,无人机行业发展迅猛,多个行业已将无人机纳入常用设备的范畴,其中高压输电线路日常巡检,机场飞行区异物探测,军事远程打击、巡航,摄影航拍技术等都是在此环境中的全新应用。
1.1 我国铁路巡检与高压输电线路巡检的异同
目前高压输电线路随着国家经济的高速发展,架设的数目日渐增多,正面领着作业强度大、巡检周期长、部分线路检修危险等问题[1]。为此,国家电网有限公司日常的高压输电线路巡检工作中,采用人工巡检和无人机巡检相结合的全新模式以最大程度改善作业安全和工作量巨大等问题。我国铁路巡检面临着和高压输电线路巡检的同样问题。传统的人工巡检模式面临着巨额工作量、部分地区的高危工作环境和日渐低下的工作效率。在无人机巡检过程中,通过系统终端操控无人机,利用无人机云台所搭载的设备对被检测线路进行巡查和检修。依据无人机机体结构,可将无人机分为多旋翼无人机、无人直升机、固定翼无人机和复合翼无人机等多种类型。无人直升机、固定翼无人机等大型无人机常用于军事、石油勘探等领域。多旋翼无人机具有小巧灵活、可垂直起飞降、可精准悬停等特点,适用于航拍、检修等精密操作。
1.2 我国铁路巡检与机场异物探测的异同
机场异物是指出现在机场飞行区域且容易给飞机安全飞行带来威胁甚至造成损失的异物。这些异物包括动植物、碎石块和人工物件等,国际上通常称为Foreign Object Debris,简称FOD[1-2]。这类异物在铁路中也会对列车的运行造成严重威胁。针对此类隐患,我国各条线路都在当天运行前开行一辆时速高达300 km以上的特殊列车以保障线路无异物,及伴有线路巡道检查线路,从而保障线路安全。然而,人工巡检耗时耗力、效率低下且很难保障异物完全被清除。
1.3 无人机巡检的优势
通过市场调研,发现无人机巡检有如下优势:可以在规划线路进行巡航;实时发出轨道异常报警信息;可以实时调用该线路的高分辨率图像;可以极大提高巡检效率。无人机云台所搭载设备具有多样性和良好的互换性,单次巡航可同时完成轨道异物探查、铁轨无损探伤、线路周边异常预警和线路现状探查等一系列任务。
2 无人机巡检所需设备
无人机在巡航中更多的是作为一种移动平台,需云台所搭载的设备进行配合,方能获取各项检测数据。
2.1 轨道异物探查
常用的遥感检测手段包括可见光成像、紫外成像、红外热成像和激光雷达电能等。其中,光遥感监测仪利用相机等可见光采集设备,用来检查肉眼可见的线路问题,如异物入侵线路、周边设备形态异常等;紫外遥感检测由于成本较高,暂不考虑;红外热成像遥感主要利用红外热成像仪等设备,检测夜间道路上大型动物或人类误闯,相较于人工检测与光遥感检测来说,红外热成像遥感在夜晚可探测距离更广、精确度更高;激光雷达检测主要用于铁路的地理信息测绘和定位导航,激光测距可检测且记录铁轨的微小位移量并回传给相关设备。
2.2 轨道无损探伤
工务段常用探伤方法为磁粉检测法和超声波检测法。一般人工驾驶探伤车对每条钢轨进行检测并查找故障。若使用无人机巡检完成探伤工作,则无法满足上述两种探伤方法的高度需求,因此探伤方法应换为激光检测法。此方法相较于磁粉检测法和超声波检测法,所需高度限制较为宽泛。
2.3 无人机选型
搭载云台的无人机是新巡检模式的基础。固定翼无人机机翼普遍较大,灵活度较低,不利于规避列车;无人直升机体积较大,控制难度和使用成本较高,虽其载重适当,但成本过大,故不予考虑。多旋翼无人机相较于其他机型,悬停时间长,机动性良好,可进行精细操作考虑巡检途中的规避动作,精细操作选用多旋翼无人机。
3 无人机巡检存在的关键问题
无人机在巡检线路的过程中,会拍摄大量的列车线路和附属周边设备的图片,并获取各项数据。由于这些图片的智能处理还处于研究阶段,后期还是需要人工处理。此外,现有线路巡检无人机还不能做到完全自主巡检,巡检质量在很大程度上还是取决于无人机巡检人员的专业水平。因此,要实现无人机巡检模式,需要解决无人机续航、无人机自主巡航、远距离数据传输和大量数据处理四个核心问题。
3.1 无人机续航
在无人机巡检所遇问题中,续航问题已严重制约线路无人机巡检的效率。目前,无人机续航时间通常为30 min左右。为了解决无人机的续航问题,参考高压输电线路无人机巡检所采用的两种方法:巡检车改装成移动式机巢及固定于杆塔顶部的固定式机巢。解决巡航问题有以下三种方法:(1)可在各车站设立无人机机巢。由于200 km/h以下双线铁路的站间距通常为15 km以上,现有多旋翼无人机无法满足站与站之间的往返,故在两站之间设立独立机巢,以中心机巢为起始点向两侧车站巡航以实现续航时间的延长,如图1所示。

图1 大功率无人机车站间往返
(2)改装移动式机巢车,在现有检修车、平车或敞车加装无人机机场与无人机操作设备,由飞手驾驶移动式机巢车巡检特定线路,当无人机需能源补充时,返回机巢,达到能源的及时补充,如图2所示。
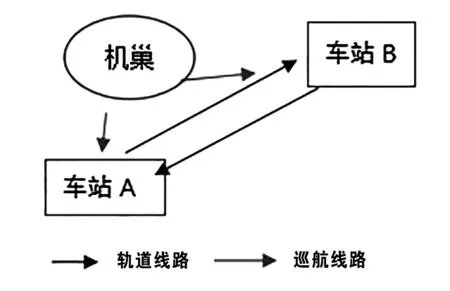
图2 无人机巢模式
基于无线充电,在一定距离的接触网立柱顶端设立无线充电点,使固定线路能及时补充能源,如图3所示。

图3 立柱无线充电模式
其中,移动式机巢车的人工、维护等成本较高,固定站点建设新站点的建筑成本高于接触网改造。
3.2 无人机自主巡航
无人机飞行模式有两种:基于飞手操控进行不定向飞行;人工预设线路基于GPS按预设线路飞行。该方法能在一定程度上节省人力,但预设线路飞行导致应变能力不足,难以灵活针对列车做出规避行为且易受环境干扰。我国铁路系统有大量的桥隧结构,无人机巡检易受横风等不确定因素的影响,若要提高其应变能力,以现有条件需要大量检测设备与烦琐的代码支持,这无疑会增加成本,但此种飞行模式将是未来巡检智能化的趋势[3]。
3.3 远距离数据传输
无人机巡航进行线路异物探查,需要传输信息,达到实时预警的效果,这就需要数据远距离传输具备高效性。在5G环境下,它的使用愈加广泛。我国现有的铁路无线通信系统基本以窄通信为主,但面对乘客日益增长的带宽需求、铁路行业自身发展的需要、交通强国发展战略的要求,GSM-R铁路数字移动通信系统需要向超高速、大宽带、移动性强的方向快速发展,这已成为目前铁路行业的主流发展思路和演进趋势[4]。
5G网络具有延迟极低,数据传输效率极高的特点。该技术在业务特性、接入网、核心网等多个方面将发生显著变化。其中在业务特性方面,将增强型移动宽带(eMBB)、低时延高可靠通信(URLLC)、大连接物联网(mMTC)等典型业务场景逐步引入铁路行业;部署最新铁路5G专网方案功能架构[4]。图4表示无人机线路巡检可将道路异常、异物等应急信息接入5G专网的网络资源层,运用5G的低时延高可靠通信(URLLC)快速传达应急信息,并及时反馈给列车司机和乘务人员,进而及时采取应对措施。
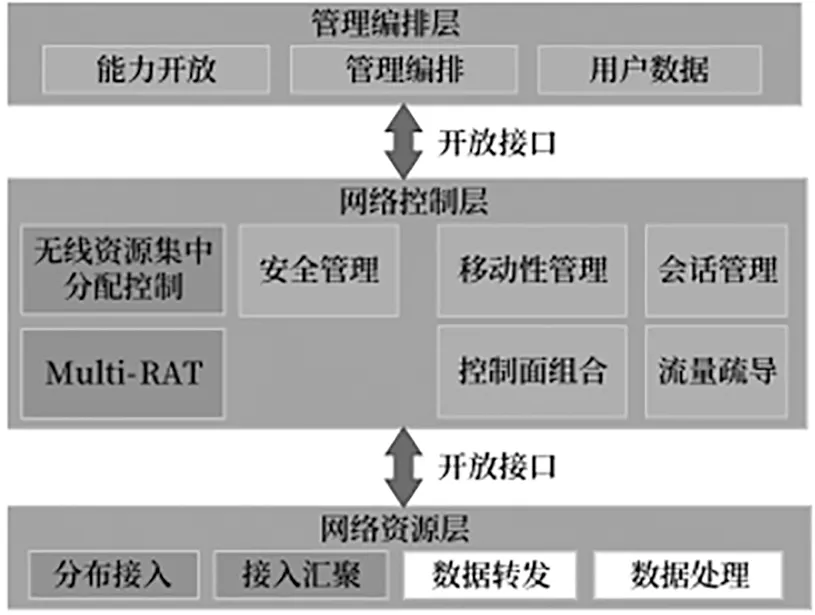
图4 铁路5G专网架构
3.4 大量数据处理
近年来,无人机巡检所得数据中,具有较高自动化处理水平的只有激光雷达点云数据,其只需特定应用软件并辅有少量人工干预即可实现。其余两种数据尚未达到较高的自动化处理水平,须依靠专业技术人员进行人为分析。随着智能算法的不断发展,数据云的逐年扩大,未来或许可通过多方合作探索的方式,建立完善的轨道数据库,进一步节省人力。
4 实施方案
4.1 无人机巢
在大疆DJI Dock中型自动飞行系统的协助下可达到半径7 km的巡逻巡检,该无人机重量90 kg且占地面积不足1 m2。在该无人机的应用下可结合现有板车搭载大量无人机执行巡检任务。其内部集成内置天线、一体化气象站、超广角监控相机和RTK基站在保障无人机飞行安全的同时,极大地降低使用难度。该平台可远程制订飞行计划、自主作业的同时,还可实现多路无人机实时高清直播,让管理员可远程实时监控作业现场,提高无人机的应变能力。
综上所述,在现有板车上安放DJI Dock作为机巢,巡检时封闭线路,多架无人机分批次进行巡检,当能源不足时第一批次巡检机归巢,第二、三批次巡检机出动,一切控制由飞手于车站或机巢附近通过5G通信网络进行操控,达到巡检全自动,解放大量劳动力。
4.2 激光无损检测法
目前轨道常用的探伤法为超声波探伤法与磁粉探伤法,这两种检测法要求探伤设备密接于被检物件,无人机巡航无法满足该检测法高度需求,采用激光超声技术可最大限度地放宽高度要求。激光超声是由脉冲激光产生的在介质中传播的脉冲超声[5]。
激光无损检测法尚属于新型无损检测技术,具体技术仍需完善。现阶段常用激光超声波检测法、激光全息干涉检测法进行监测,激光全息干涉法的使用仍存在被测件与探测设备的间距限制,无法完全满足本模式的无人机飞行需求,而激光超声技术虽在一定程度上与传统超声波检测法有相似之处,但其在距离需求上优于传统方式。依据该检测法原理图改进无人机云台搭载设备,无人机以双机为一编组,成队列飞行,僚机搭载激光发生装置,长机搭载信号接收装置,通过同一编组内两机间距保持不变,达到激光发生—反射—接收任务,并分析表面及内部损伤状况。
无人机拟定为大疆经纬M30机型或大疆经纬M30/T机型。该两款机型所自带的广角变焦摄像头可完成日照充足时轨道有明显异物的探查工作;激光测距功能将实现巡检时对铁轨间轨距等距离信息的采集,并由后台大数据进行信息比对,分析钢轨位移量及是否影响列车正常行驶。该模式可将无人机群分为两大梯队,第一梯队云台搭载激光超声波发生装置,担任激光探伤发生源;第二梯队云台搭载信号接收装置,飞行距离远,与第一梯队负责接收信号发生源,并由被测件返回的各类信号通过5G网络传输至无人机操控员的信息终端。
5 小结
本文通过分析既有铁路轨道的巡检方式和无人机在其他行业的巡检应用,从而确定无人机巡检运用于线路巡检的可行性,重点讨论无人机巡检系统在轨道巡检中满足的基础条件,结合我国铁路实际情况,提出5G环境下无人机在线路轨道巡检的方案,这可提高铁路巡检效率,也可为未来铁路巡检改革提供一定的理论依据。现阶段主要问题存在于基础设备成本较高,无法大范围使用,可先选择部分具有极端气候地区进行试用,并不断改善。该模式在探伤方法选择上任具有较大改进范围,可根据无损新技术的发展进行升级更换。相信在本项目广泛运用于轨道探伤时可极大限度地改善巡道工的工作环境,提高巡检效率,降低工作风险,为现有巡检模式注入新鲜血液。
猜你喜欢
都市人(2022年3期)2022-04-27
建材发展导向(2021年19期)2021-12-06
国际太空(2021年8期)2021-11-05
中老年保健(2021年9期)2021-08-24
小雪花·成长指南(2021年6期)2021-08-18
内蒙古科技与经济(2021年3期)2021-03-09
环球时报(2019-12-05)2019-12-05
文萃报·周二版(2018年22期)2018-09-18
航天电子对抗(2017年6期)2018-01-22
哈尔滨理工大学学报(2016年3期)2016-11-05