基于并行综合学习粒子群算法的织物图像疵点检测
2022-08-03 08:57葛芸萍
现代纺织技术 2022年4期
葛芸萍
(黄河水利职业技术学院,河南开封 475004)
纺织品在生产过程中受原材料、静电、温湿度等因素影响,会产生各种各样的疵点并严重影响纺织品的使用价值,因此在验布过程中需要及时检测出疵点[1]。人工方法对织物疵点检测是在无眩光的背面窗旁或日光灯照明条件下通过经验检测。此方法简单,但是存在效率低、漏检率高等缺点,检验结果正确率较低。自动化检测织物疵点已成为对织物质量进行控制和实现织造及验布工序的关键环节,因此受到了纺织行业的关注。目前较为成熟的织物图像疵点检测算法有:小波变换(Wavelet transform,WT)检测方法[2],如果边缘周围存在与疵点相似的痕迹,就很容易造成算法的误判,对疵点定位效果明显下降。均值滤波(Mean filtering,MF)检测方法计算比较简单[3],但是不能很好地保护图像细节,对图像边缘的处理效果比较差。神经网络(Neural network,NN)算法[4],训练神经网络需要大量的数据样本,但是织物生产过程的复杂性,随机出现的疵点很可能存在与训练模型不一致,难以准确判断疵点,同时神经网络参数值难于确定。裂变粒子滤波(Fission particle filter,FPF)算法[5],粒子的多次裂变生成更多的粒子,粒子滤波获得疵点区域的最佳分割阈值,但是粒子多次裂变的次数不易控制。双混沌机制粒子群(Double chaotic mechanism particle swarm optimization,DCMPSO)算法[6],在粒子群的全局、局部寻优中采用不同的混沌机制,利于粒子群搜索到最优解,但是双混沌机制增加了算法的复杂性,检测速度较低。改进宇宙(Improved universe,IU)算法[7],通过设计宇宙空间拓扑结构以及宇宙进化策略使得检测率上具有较大的优越性及良好的适应性,但是宇宙空间拓扑结构对宇宙之间移民、交互存在制约性,导致具有倾斜度的疵点无法检测出。
本文采用并行综合学习粒子群算法(Parallel comprehensive learning particle swarm optimization,PCLPSO)对疵点进行检测,综合学习策略保持种群多样性,使群体的搜索范围加大,并行分群策略算法能够在增加全局搜索最优解的同时减少搜索时间。
1 织物疵点显著性增强
1.1 织物疵点灰度计算
在织物下方通过高频率荧光灯光源照射[8],其上方的光学系统计算光敏面上成像单元ds的亮度信号Φ,见式(1):
(1)
式中:τ0为光学系统的透射率;π为圆周率;L为透光亮度;F为透镜光圈数;ds为光敏面像元的单位面积。
为计算方便,需要把Φ进行转换为电信号Q,见式(2):
Q=η·t·Φ
(2)
式中:t为曝光时间;η为光学系统响应系数。
再利用图像采集卡采集织物图像的灰度值,见式(3):
h=k·η·t·Φ
(3)
式中:h为通过光敏面形成的织物像素灰度值;k为图像采集卡的图像转换系数。
光敏面成像单元的Φ信号决定了图像采集卡所获像素的灰度值,通过计算Φ信号的差值即可发现织物疵点,假设织物有疵点透光亮度为L1,织物无疵点透光亮度为L2,经过光学系统采样、量化,则获得织物图像的灰度值,见式(4):
(4)
当织物有疵点时,其像元处产生透光率的变化为Δτ,并且与织物的灰度值变化成正比,见式(5):
(5)
因此Δτ即可获得织物图像的疵点,Δτ变化越大,说明疵点面积最大。
1.2 多尺度显著性增强
当获得待检测织物图像疵点后,需要把疵点与周围像素进行区分,以便检测。但是疵点周围可能存在一些噪声[9-10],使得疵点表现不具有显著性,因此需要把疵点进行显著性增强。在织物图像疵点显著性增强中,基于像素方法由于需要统计大量的像素导致计算量比较大,同时也影响了运行效率。由于织物疵点往往集中在图像的显著区域,同时图像灰度变化值比周围非疵点区域图像灰度变化值大,因此通过图像灰度值差异来获得显著区域,即检测出疵点区域。
将图像划分为若干个块,把图像所对应的块pi与其余块pj对比,灰度值之间的差异性计算,见式(6):
(6)
式中:pi为以像素i为中心的像素块,pj为以像素j为中心的像素块,dgray(pi,pj)为像素块pi、像素块pj灰度值的欧式距离,dposition(pi,pj)为像素块pi和像素块pj的欧式距离,gi为像素块pi的灰度值均值,gj为像素块pj的灰度值均值,(Xi、Yi)为像素块pi的中心坐标,(Xj、Yj)为像素块pj的中心坐标,c为调节系数,根据文献以及验证其值取3较好。
如果像素块之间灰度值差异越大,块之间的位置距离越远,则d(pi,pj)值越大,越显著。为了使计算简便进行,把dgray(pi,pj)和dposition(pi,pj)归一化在[0,1]之间。
在织物图像中,如果计算图像中全部与pi相似的像素块,则产生大量的数据计算,因此在实际疵点检测中,为了评估像素块唯一性,不需要考虑与其他所有像素块的不同,只需计算K个与pi相似的像素块,根据Goferman算法[11],当K取64时检测效果较好。在某尺度r下,则像素块pi的单尺度显著性值,见式(7):
(7)

单尺度显著性计算无法避免背景部分对疵点区域的影响,通过多尺度显著性计算使得疵点区域显著性增强,假设像素块pi显著性检测的n个多尺度集合为R={r1,r2,…,rn},将多尺度显著性的均方根值计算为像素块pi的显著性值,见式(8):
(8)

利用距离上的信息降低离显著区域远的非显著区域的显著值,从而弱化背景纹理的影响,显著性值计算见式(9):
(9)
式中:dfoci(i)为像素i与最邻近的显著像素的位置欧氏距离,且归一化至区间[0,1]。
最后通过并行综合学习粒子群算法寻优获得疵点区域的分割阈值。
2 并行综合学习粒子群算法
2.1 基本粒子群算法
基本粒子群算法启动时随机产生一定数量的粒子,在搜索空间中寻找最合适的解决方案,更新速度和位置信息,见式(10):
(10)
式中:t为迭代次数,vi,j(t)为第i个粒子在第t次迭代时的第j维速度,xi,j(t)为第i个粒子在第t次迭代时的第j维位置,pi,j为当前最佳解,gg,j为历史最佳解,ω为权重,c1、c1为相互独立的随机函数,c1、c2为调节pi,j、gg,j的加速参数。
pi,j、gg,j在优化过程中不断更新,在算法的最后找到全局最优或接近全局最优的解,但是基本粒子群算法在运行后期存在收敛速度慢、易陷入局部最优的缺点。
2.2 并行综合学习过程
2.2.1 综合学习过程
当粒子i的最优值变化较小的时候,综合学习粒子群算法对其速度更新见式(11):
vi,j(t+1)=ωvi,j(t)+c1r1[pfi(j)-xi,j(t)]
(11)
式中:pfi(j)为第i个粒子第j维位置参数对应的学习对象,fi=[fi(1),fi(2),…,fi(J)]表示粒子i将学习哪个粒子的历史最优值,对于J维问题,随机选取l维向群体最佳经验gg,j学习,而剩下的J-l维则根据学习概率pc来决定是学习粒子自身的最佳经验还是学习其他粒子的最佳经验[12-13]。
假定第i个粒子的第j维位置存在局部吸引因子μij,见式(12):
(12)
每个粒子的学习概率pc决定局部吸引因子μij主要向哪个粒子学习,见式(13):
(13)
式中:pcmax和pcmin分别为学习概率最大值和最小值,e为算法间隔代数,M为粒子群的大小,本文pcmax=0.5,pcmin=0.05,e=10。
对于粒子i的每一维,首先产生一个随机数u,如果u>pc,则从自身个体的最优值学习;否则,采用局部吸引因子比较方法随机选取种群中另外一个粒子的相应维进行更新,其步骤为:
a)随机从种群中选择两个速度未更新的粒子;
b)比较两个粒子的局部吸引因子,选择局部吸引因子较大的粒子;
c)把选择步骤b)的粒子所在维的个体最优值作为学习依据。
2.2.3 并行搜索过程
为了减少搜索时间[14],采用并行搜索过程,并行综合学习粒子群算法通过多群和合作策略提高了解的质量和全局搜索能力,提高计算效率。
在并行策略中,粒子群被分为多个子群体。每个子群代表一个群体,并且每个子群只有两种群:主群和从群,主群主要进行全局搜索,获得全局最优值,从群主要进行局部搜索,获得局部最优值,主群和从群的个体都进行均匀分布,使得尽可能少的粒子能全面地表征整个空间所有潜在解的分布,并且各个子群的全局最优值与局部最优值可相互共享,分别将每个子群中粒子的坐标以各个坐标轴对应的最大值、最小值为边界,构建出等同于峰值点数的各个并行空间。各个子群si,i∈(1,2,…,n)独立运行,因此每个子群si均可探索整个搜索区域。
主群内部粒子个体更新搜索策略,见式(14):
(14)
然后,从群内部粒子个体更新搜索策略,见式(15):
(15)
2.3 疵点检测过程
在阈值分割疵点显著区域过程中,把疵点区域的显著性值作为粒子个体的适应度,见式(16):
(16)
式中:ζi为第i个粒子个体的适应度。
粒子群收敛状态通过适应度方差σ2判断,见式(17):
(17)
式中:ζavg为粒子群的平均适应度,ξ为归一化因子。
ξ主要是限制群体适应度方差,计算见式(18):
ξ=max(1,max|ζi-ζavg|)
(18)
当ξ<0.015时,此时停止粒子群并行搜索、综合学习,其算法步骤如下:
a)输入待检测图像;
b)设置PCLPSO相关参数,包括粒子个数、最大迭代次数、划分并行子群数量等;
c)粒子的位置、飞行速度随机初始化;
d)按照式(11)、式(14)、式(15)更新粒子群;
e)若ξ<0.015或到最大迭代次数,则算法结束,运行步骤f);否则运行步骤d);
f)输出疵点检测结果。
3 实验仿真
实验硬件配置内存为16 GB,CPU 3.0GHz、独立显卡2 GB,软件为Matlab 7.0,工业相机在织物上方15 cm处垂直拍摄以获取织物图像。粒子重要参数:种群总数量为150个、最大迭代次数为400次、并行子群数量为8个、ω=0.8、c1=2.0、c2=1.5。
3.1 检测结果
各种算法对不同疵点检测,涉及到的算法有PCLPSO与WT、MF、NN、FPF、DCMPSO、IU,涉及到的织物图像疵点有:破损、缺失、移位、断经,疵点检测结果如图1所示。从图1各种算法对比实验可以看出,本文算法对织物不同疵点检测效果较清晰,疵点区域的细节信息保留,在复杂的织物图像中,本文算法不仅很好避免的背景纹理影响,而且疵点区域完整检测出来,受噪声干扰比较小,这是因为并行综合学习粒子群算法对织物图像疵点检测时,疵点区域通过多尺度显著性增强,把非显著性区域弱化,从而有效地突出了织物疵点区域。其他算法对背景简单的织物图像检测有效,在检测背景噪声比较明显时效果较差。

图1 各种算法对各种疵点检测结果Fig.1 Detection results of various defects of different algorithms
3.2 算法性能比较分析
3.2.1 疵点检测准确率性能比较分析
为验证算法的有效性,对疵点检测准确率指标性能比较分析,见式(19)。
Z/%=Z1/Z2×100
(19)
式中:Z为准确率;Z1为检测出疵点数;Z2为疵点 总数。
各种算法对破损、缺失、移位、断经疵点检测,分别进行40次蒙特卡罗仿真实验,检测准确率指标性能比较如图2所示。从图2可以看出,PCLPSO算法对各种疵点检测准确率较高,其中破损疵点检测准确率为88.15%,相比WT、MF、NN、FPF、DCMPSO、IU分别提高了1.91%、2.50%、4.32%、6.20%、8.16%、10.19%;缺失疵点检测准确率为90.46%,相比WT、MF、NN、FPF、DCMPSO、IU分别提高了2.21%、4.12%、5.68%、7.05%、8.99%、10.99%;移位疵点检测准确率为93.87%,相比WT、MF、NN、FPF、DCMPSO、IU分别提高了2.59%、3.72%、4.77%、6.19%、7.16%、8.39%;断经疵点检测准确率为86.54%,相比WT、MF、NN、FPF、DCMPSO、IU分别提高了1.81%、3.39%、4.52%、6.18%、8.18%、10.24%。
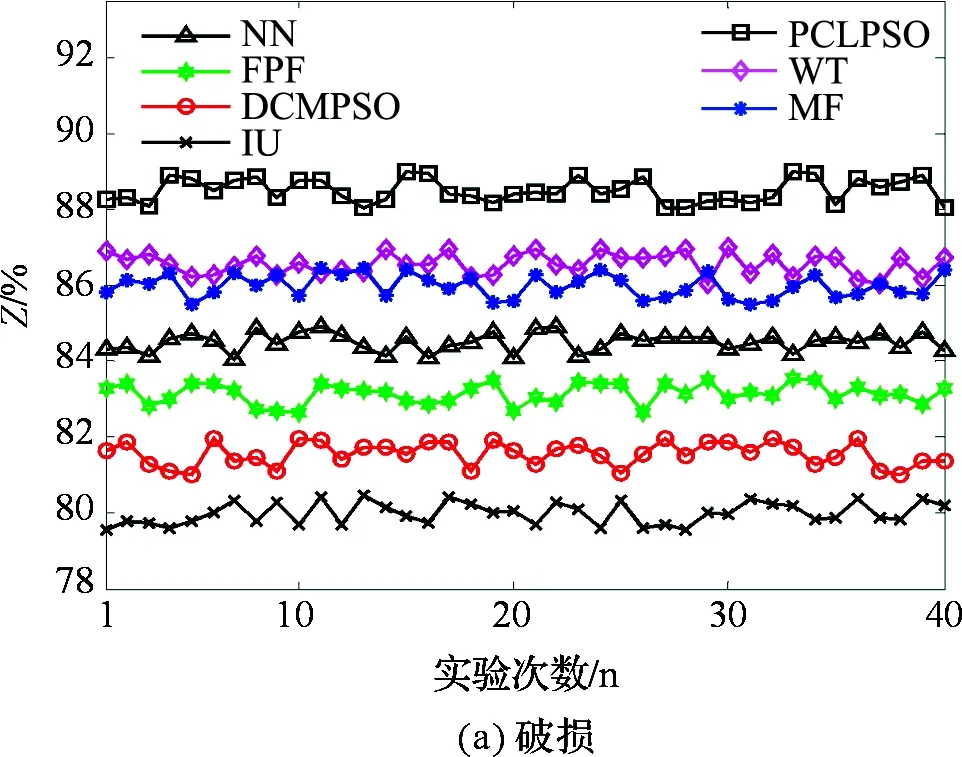
图2 不同算法对各种疵点检测准确率指标结果Fig.2 Defect detection accuracy index results of various defects of different algorithms
3.2.2 消耗时间指标性能比较
统计各种算法获得疵点检测准确率的消耗时间,分析结果如图3所示。从图3可以看出,本文PCLPSO算法对破损疵点检测消耗时间为3.11 s;缺失疵点检测消耗时间为2.81 s;移位疵点检测消耗时间为2.42 s;断经疵点检测消耗时间为3.26 s;消耗时间均少于其他算法,这说明本文PCLPSO算法具有较强的处理性能。
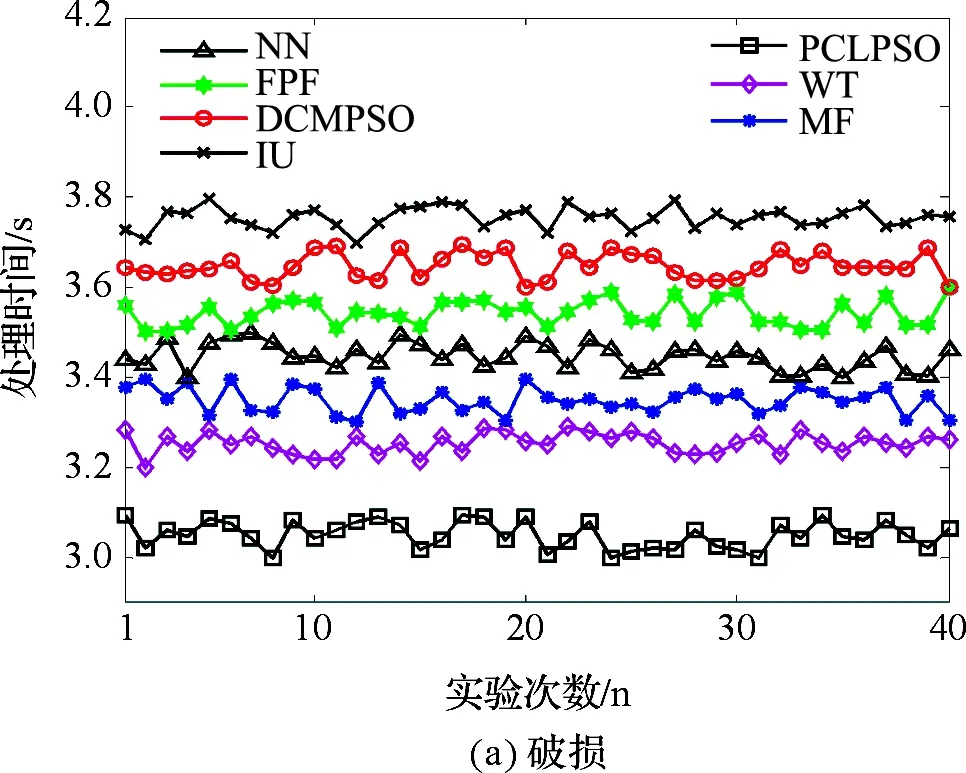
图3 不同算法对各种疵点消耗时间指标结果Fig.3 Time consuming index results of various defects of different algorithms
4 结 语
本文采用并行综合学习粒子群算法对疵点进行检测,通过织物透光率获得织物图像的疵点,多尺度显著性增强疵点区域;综合学习粒子增设局部吸引因子,多群和并行策略提高全局搜索能力。实验仿真显示本文算法识别疵点清晰,对破损疵点检测准确率为88.15%,检测消耗时间为 3.11 s;缺失疵点检测准确率为90.46%,检测消耗时间为2.81 s;移位疵点检测准确率为 93.87%,检测消耗时间为 2.42 s;断经疵点检测准确率为86.54%,检测消耗时间为3.26 s,检测指标优于其他算法,为织物图像疵点检测研究提供了一种新方法。
猜你喜欢
河南科技(2023年1期)2023-02-11
材料与冶金学报(2022年2期)2022-08-10
棉纺织技术(2022年7期)2022-07-15
Chinese Physics B(2022年5期)2022-05-16
广东石油化工学院学报(2022年1期)2022-03-25
纺织科学研究(2021年7期)2021-12-02
纺织科技进展(2021年5期)2021-07-22
纺织科技进展(2021年3期)2021-06-09
电子技术与软件工程(2019年22期)2020-01-16
黑龙江交通科技(2020年5期)2020-01-13