基于长基线交汇的超短基线对水下运动目标定位技术研究
2022-08-25 02:16侯萌强
海洋技术学报 2022年4期
孙 昕,侯萌强,谭 鑫
(91439部队,辽宁 大连 116001)
水下运动目标位置是海洋调查、工程探测、海上实验等科研活动的重要参数,特别是在海上靶场的装备试验中,需要实时精确地获得水下运动目标的位置信息。水声定位技术是获得这一信息的有效手段,近年来,水声定位技术不断发展,水声定位系统也由传统的长基线系统(Long Baseline System,LBL)、短基线系统(Short Baseline System,SBL)、超短基线系统(Ultra-short Baseline System,USBL)向声学多基线组合与惯导、GPS(Global Positioning System)等联合定位的模式转变。相关研究表明[1-4],长基线具有基线长、定位精度高的特点,但是长基线定位是以精确时延进行测量,对由于目标运动使得同步信标需要高帧率发射所带来的抗距离模糊解算能力不强;超短基线定位系统则是由多元声基阵与声信标组成,通过测量距离和方位定位,其优点是尺寸小、使用方便,其方位参量的测量不受距离模糊的影响,缺点是跟踪数据不连续,无法连续跟踪水下目标的运动轨迹,且其定位精度受到载体安装形变误差、位姿组件测量误差和声速误差等因素影响,每次安装后需进行校准,系统定位精度不高,仅适用于大范围作业区域跟踪[5]。鉴于此,本文提出一种采用浮标方式基于长基线交汇的超短基线定位技术实现对水下低速运动目标的高精度定位测量。
1 系统组成及关键技术
目前,组合式水声定位系统在国内得到了广泛应用。中科院声学所东海研究站等单位[6]研究了一种长基线和超短基线组合的定位方式实现对水下拖曳目标定位,但是在使用中需要采用多艘舰船配合使用,超短基线安装于船体易受到船舶噪声干扰影响检测,特别是系统使用前每次需进行超短基线阵与惯性组件安装误差校准,一方面造成测量保障实施难度较大,另一方面也带来不应有的测量误差,降低了定位精度。本文涉及的定位系统采用长基线和超短基线组合定位,利用海洋浮标技术将两者组合,可有效地避免前述不足,特别是降低了系统受到本船的噪声干扰,提升超短基线的方位检测能力,利用长基线对目标的精确时延测距,基于时延/相位差参量融合的组合定位,不仅弥补了单一定位方式的定位精度局限性,而且能够在布放较少定位基元的情况下,提供较高的定位精度,有利于系统使用和拓展[7]。
1.1 系统组成
本系统由浮标式水声定位测量分系统、显示控制分系统组成,可完成靶场海上试验水下低速目标定位测量、试验指挥及态势显示等任务。浮标式水声定位测量分系统由浮标式长基线水声测量分机、水声测量处理分机、水声同步信标及水声指令机等组成。浮标式长基线水声测量分机由浮标、水声长基线测距机、超短基线基阵、方位姿态惯性组件、高精度北斗差分接收机、无线数传机等组成,由多个安装有超短基线阵的浮标构成长基线测量阵,对加装了水声同步信标的水下运动目标进行定位,浮标测量信息通过无线链路传至测量船水声测量处理分机解算出水下目标位置。系统组成如图1所示。

图1 浮标式水声定位测量分系统组成
1.2 系统关键技术
为满足对水下运动目标的连续定位,同时也为了克服船载超短基线定位使用上的不足,系统采用了浮标方式,浮标采用了高浮力低重心的结构设计,经抗冲击结构设计后,可以满足爆炸试验抗冲击要求;同步式信标安装于水下航行体或运动爆源上,为满足不同速度运动目标的测量需要,水声同步信标采用了信号发射周期可调(0.5~5 s)的高增益宽带多址调频双脉冲信号体制,相比分频段的线性调频或跳频信号可获得更大的处理增益,在相同作用距离下,可降低发射声源级,减小系统的功耗,提高系统灵敏度,提高定位精度。其系统设计中所涉及的关键技术如下。
(1)基于长基线和超短基线数据融合的定位
长基线与超短基线结合使用可以构成组合声学定位系统,组合定位系统通常可以获得目标信号的多种特征参量,合理地融合多参量信息有利于提高定位系统的精度及可靠性。考虑到长基线定位系统作用范围广且阵内定位精度较高,超短基线定位系统集成度高且具备良好的近程定位优势,本文构建了基于长基线交汇的超短基线定位系统,并采用合作信标模式对其进行广域精确可靠定位,系统各个节点均由十字型超短基线阵构成。提出时延/相位差参量融合组合基线信息融合定位方法,通过基于最小均方误差和最大似然估计准则下的定位优化模型有效融合两种参量的观测信息,以实现对整个测量区域的高精度定位。
(2)高同步速率下的运动目标定位抗距离模糊技术
对水下运动目标进行定位时,为了获得足够的轨迹采样点数来描绘其运动过程,定位系统需要采用较短的同步周期。声速和系统同步周期的乘积称为最大非模糊距离,以信号发射周期为0.2 s为例,若声速取1 500 m/s,则系统最大非模糊距离为300 m。当目标距离定位阵元超过300 m时,信号传播时延大于0.2 s,而接收系统记录的时延值仍在0.2 s以内,即时延测量值与真实的时延值相差周期的整数倍,相应地,距离估计值与实际值相差最大非模糊距离的整数倍,称为距离模糊问题,该倍数称为模糊周期数,求解模糊周期数以获得实际距离估计值称为解距离模糊。距离模糊问题直接导致运动目标定位结果具有多值性。
针对上述问题,考虑到方位参量的测量不受距离模糊的影响,采用最大似然准则下时延/方位融合定位优化模型,将解距离模糊问题转化为方位参量约束条件下非线性优化问题,并采用差分进化算法求解。利用方位信息对目标所在区域进行限定,降低了差分进化算法陷入局部最优解的危险。无需目标初始就位点,即可实现对大范围测量区域内运动目标的无模糊定位。
(3)浅海复杂环境下精确时延估计
由超短基线定位原理可知,水声定位测量分机的相位测量主要是依靠测量声基阵阵元间的相位差来完成的,其本质是时延差的测量,精确测量时延差的前提是精确测量每个阵元的时延。一般来讲,对于单频信号大多采用能量检测方式对信号进行时延估计;调频信号则大多采用拷贝相干方式对信号进行前沿检测。浅海水声信道是更为复杂的多途相干信道,经多径传输到达接收端的信号与发射波形有显著不同,且随着相对距离的变化,直达声和反射声不断改变。信号反向叠加导致叠加部分的信号幅度非常小,因此接收机前端的信号呈现“边沿”现象。这样就容易导致直达声漏报,使得系统检测时延值出现大幅度跳变。对于声基阵来说,若各阵元的有效脉冲时延值随机跳变,将严重影响系统定位精度。系统利用初测+精测的手段,对接收的信号采取二次时延估计,使各通道间的时延测量精度保证在1μs,可以很好地解决浅海复杂环境下精确时延估计。
(4)浮标方式下超短基线基阵误差的减小与消除
超短基线阵是利用相位差进行定位的,声基阵的设计和校准直接影响信号间的相位差。声基阵阵元间的初始相位及安装位置偏差是直接影响定位精度的关键因素。声基阵阵元间的初始相位会直接带来相位测量误差,属于系统误差,需要出厂前在消声水池或开阔水域进行校准获得,然后修正到基阵测量的相位差,以减少对整个系统定位精度的影响;声基阵坐标与大地坐标间的旋转角度误差很难直接测量,此误差主要由安装误差引起,可通过文献[8]介绍的方法进行校准,系统采用浮标方式,超短基线阵固定安装浮标下部,经过一次校准即可,避免船载基阵每次安装后均需进行适应性校准,试验效率低的弊端。
2 系统信息融合定位算法研究
长基线和超短基线组合定位模型如图2所示。

图2 长基线和超短基线组合定位模型
长基线和超短基线的工作是相互独立的,根据上述模型,按照下列准则获取测量信息。
(1)当有效浮标(长基线基元)个数足够多时(不小于3),定位模型以长基线为主,超短基线提供相位差参量信息主要用于抗距离模糊,对冗余阵元测距信息进行融合加权处理;
(2)当使用两个浮标,采用长基线方式求解,超短基线利用相位差参量信息判断双解;
(3)当单浮标接收目标信号时,直接利用超短基线求解,根据已测得历史位置信息判别真解,提出模糊解;
(4)对于超短基线的相位模糊问题,则在基阵设计中通过优化设计解决,采用小于半波长的两阵元相位信息实现相位的解卷积,剔除相位模糊解。
本文假设两个系统同时工作,一共能得到5组定位结果,包括1组长基线结果和4组超短基线定位结果。定位结果融合的关键是如何将5组信息进行有效的组合,使融合的定位结果优于单个系统的定位结果[9-12]。
2.1 最小均方误差估计与最大似然估计
数理统计中均方误差是指参数估计值与真值之差平方的期望值,记为MSE,是衡量“平均误差”的一种较为方便的方法,可以评价数据的变化程度,均方误差值越小,说明预测模型描述的结果精确度越高。
在已知X和Z是两个随机矢量,且二者存在联合概率密度函数的条件下,使各估计分量的均方误差之和最小的估计,被称为最小均方误差估计。各估计分量的均方误差之和可以表示如下。

设被估计量是一个n维矢量,即X=[x1,x2,…,xn]T,观测矢量Z的维数为m,在给定观测矢量Z时,最小均方误差估计等于X的条件均值,即

最大似然估计是建立在最大似然原理基础上的一个统计方法,是概率论在数理统计中的一个应用。最大似然估计提供了一种“模型已定,参数未知”的方法,通过若干次试验,观察其结果,利用试验结果得到某个参数值能够使样本出现的概率为最大。

式(4)又称为似然方程,利用已知概率信息求解以上方程,可以得到最大似然估计
2.2 基于最小均方误差准则的时延/相位差参量融合定位优化模型
基于最小均方误差准则下长基线和超短基线的融合定位结果可以表示如下。
ωi满足上式时,融合定位结果精度最高。由于长基线和超短基线的定位精度具有空间几何分布特性,当目标位于不同位置时,长基线与超短基线的定位精度不同,因此权系数也不同。
由式(10)可得融合结果的误差满足式(11)。

将式(10)代入式(11),可以得到式(12)。
可知融合结果的定位精度不低于各系统单独定位精度,基于最小均方误差准则的融合方法是可行的。
2.3 最大似然准则下的时延/相位差参量融合定位优化模型
时延/相位差参量融合组合基线定位方法是通过构建最大似然准则下的优化定位模型,有效融合两种参量的观测信息,以实现整个测量区域的高精度定位。
假设目标的位置坐标为x=[x,y],系统第i个定位节点的坐标为xi=[xi,yi]T,其中i=1,2,3,…,N,其测量的信号传播时延如下。

式中,*‖‖表示欧式范数;ξi表示时延测量误差;c表示水中声速。由超短基线定位原理可得,信号到达超短基线x轴两端阵元间相位差和y轴两端阵元间相位差分别表示如下。

式中,δi和εi为对应的相位差测量误差;λ为信号波长;d0为阵元间距。
假设时延和相位差观测误差均服从零均值的高斯分布,并且各个误差统计独立,则时延、相位差联合似然函数如下。

时延/相位差参量融合定位的最大似然估计模型如下。

求解上式的非线性优化问题,得到的最优解为目标位置的估计值。长基线/超短基线组合定位测量时延和相位差信息属于目标信号的两种特征参量,二者从不同角度对目标进行刻画,为目标位置的估计提供了更全面的信息。
3 系统定位精度分析
为了验证组合定位测量的定位精度,本文分别对长基线、超短基线和长基线/超短基线组合定位的定位精度进行仿真,并在组合定位方式下分别对基于最小均方误差准则和最大似然准则这两种时延/相位差参量融合算法进行仿真。具体仿真条件如下。
(1)浮标(阵元)位置精度(北斗/GPS定位精度:3 m);
(2)声速测量误差为2‰;
(3)时延测量误差为200μs;
(4)相位差测量误差为2.2°;
(5)超短基阵阵元间距0.25 m,阵元安装误差为0.6 mm;
(6)蒙特卡洛统计次数为2 000次。
图3至图6分别为长基线、超短基线、组合定位下两种融合算法的定位精度。

图3 长基线定位精度

图6 基于最大似然估计准则的组合定位精度
由仿真结果可知,长基线的定位精度由于可以获得精确的时延估计,对于位于阵中心的定位精度较高;超短基线远距定位精度较低,但是局域定位精度较高,长基线/超短基线组合定位的定位精度在距离阵元较近位置比长基线要高,在较远距离位置定位精度高于超短基线,采用两种准则进行数据融合处理后的定位精度,在阵中心远距精度几乎相同,在距离阵元较近位置上基于最小均值误差准则的组合定位精度较最大似然估计准则的要高。在总体上,采用组合定位方法可将长基线作用距离远和超短基线局部区域精度高的优势充分结合起来,这种方式的定位精度整体上要高于单一方式的定位精度。

图4 超短基线定位精度
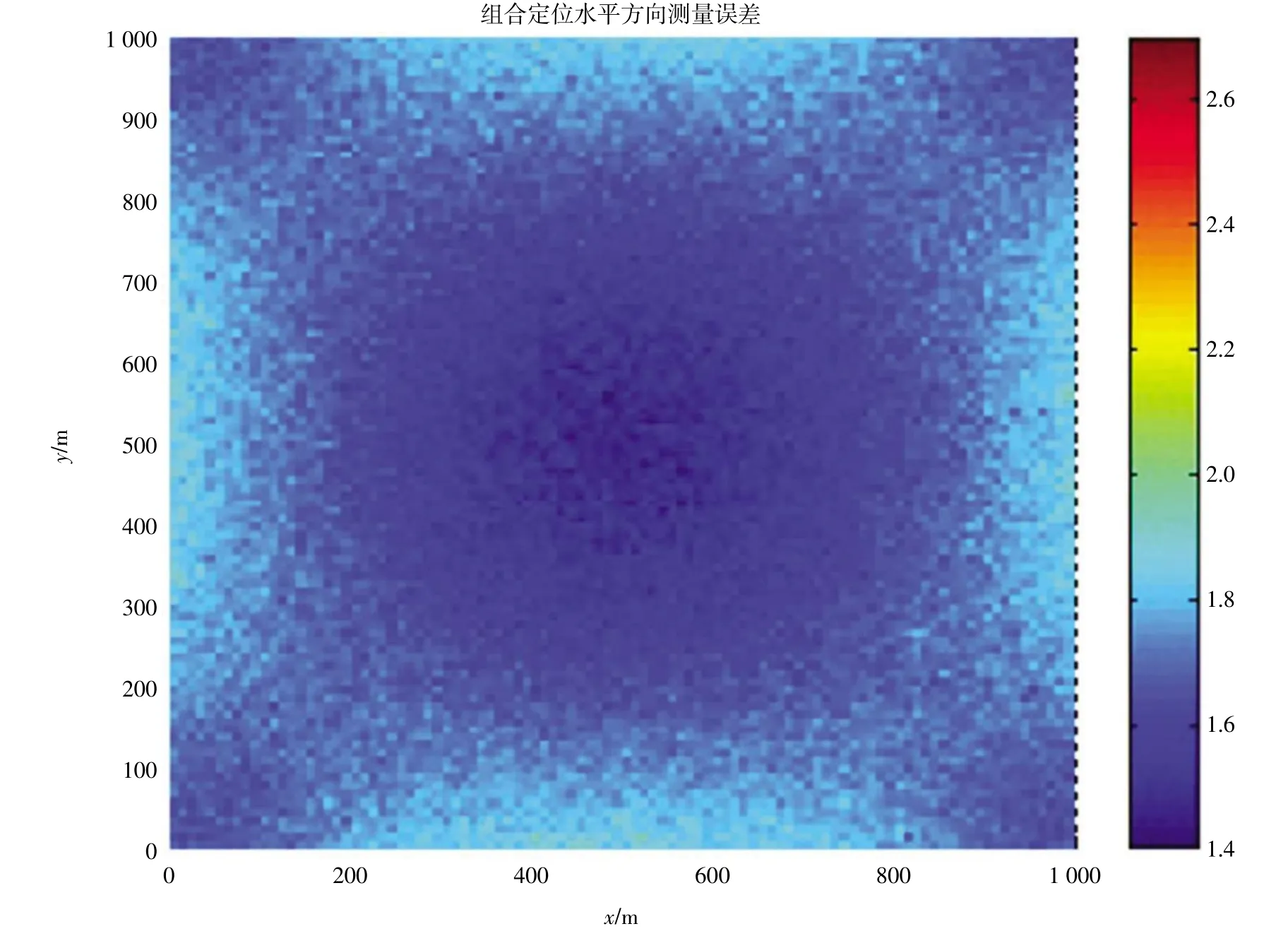
图5 基于最小均方误差准则的组合定位精度
水下运动目标是具有一定速度的动态目标,其对信号检测的影响体现在接收端接收到的信号具有多普勒效应,频率会发生一定程度的偏移,导致时延检测有偏差,仿真计算分析表明对于信号频段20~30 kHz,脉宽10 ms的水声信号,在目标速度为2 kn时,时延测量误差约为200μs;目标速度为4 kn时,时延测量误差约为400μs;目标速度为6 kn时,时延测量误差约为600μs;目标速度为8 kn时,时延测量误差约为800μs;据此,本文进一步仿真验证了该组合定位方式下航速0 kn的静止目标(图7)和航速8 kn下运动目标的定位精度(图8)。
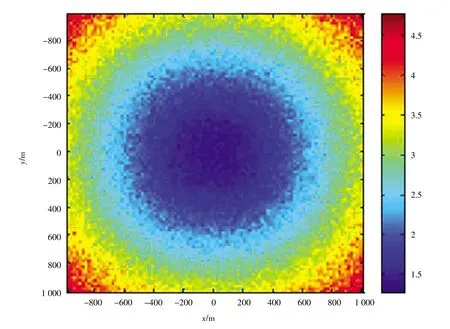
图7 水下静止目标(航速0 kn)的定位精度

图8 水下低速运动目标(航速8 kn)的定位精度
具体仿真条件为:除了航速8 kn运动目标时延测量误差为800μs以外,其余仿真条件不变。
仿真结果表明,在2 km×2 km的作用范围内,静态目标水平定位精度不大于2‰R(R为测量斜距),考虑动态目标的多普勒偏移及时延测量误差,动态目标水平定位精度不大于4‰R,可满足系统的测量要求。
4 结 论
本文提出一种基于浮标方式的长基线/超短基线组合定位系统实现对水下运动目标定位,采用浮标方式克服了船载超短基线组合安装误差大,避免安装后每次均需进行姿态适应性校准的弊端,提高了测量精度;同时采用组合定位方式又可以有效减少长基线阵元数量,提高试验效率。在组合定位解算中采用时延/相位差参量信息,依托基于最小均方误差准则和最大似然估计准则的融合方法解决了同步信标高帧率、跨周期所带来的距离模糊问题,提高了系统对运动目标的定位精度;文章最后仿真分析了各种方法的定位精度空间分布规律,验证了这种定位方法要优于单个系统的定位精度。该方法无需每次试前都对基阵进行校准,具有使用效率高、试验准备简单、测量质效高等优点。目前,该系统已经在靶场得到成功应用。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
导航定位学报(2021年4期)2021-08-29
舰船电子工程(2021年5期)2021-06-04
垂钓(2019年2期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17