大众ID.4车电气联网系统技术浅析
2022-09-06 03:36江苏联合职业技术学院无锡汽车工程分院
汽车维护与修理 2022年5期
江苏联合职业技术学院无锡汽车工程分院 谭 婷
1 E3架构总线简介
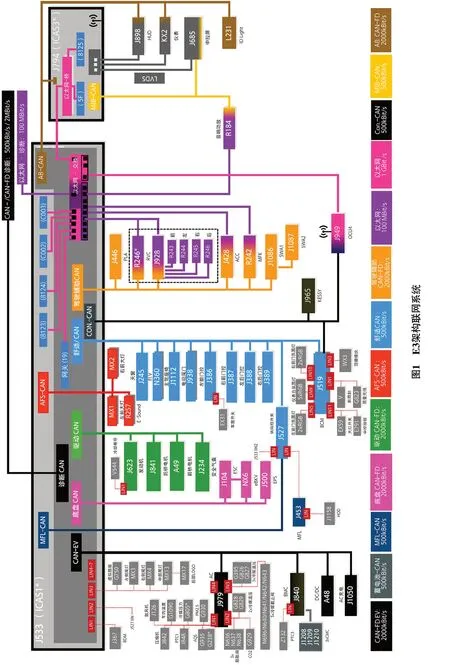
大众ID.4车是大众品牌首款基于MEB平台(模块化电驱动平台,用于纯电动汽车的制造平台,能够兼容不同级别车型,并根据需求调校出差异化的续航里程)打造而来的全球首款纯电动SUV车型,其电气化迈入全新的E3架构(图1)阶段,总线通信速率提升,控制域更清晰;E3架构属于三域电子架构联网系统,即3个中央控制单元:ICAS1(J533车辆控制器)、ICAS3(J794信息娱乐控制器)、ICAS2(智能驾驶控制器,目前还未采用,为L4级别车辆配备的);目前使用的是1.1版本,采用集中控制方式,控制单元集成化,通信速度更快,数量更少,算力更高。
2 中央控制单元ICAS
ICAS(车载应用程序服务器)是中央控制单元/服务器,它结合了大量的基本服务和车辆功能并控制其他车辆系统。客户功能集中在服务/服务器层级,从而与外围设备(传感器和执行器)的功能分开。这意味着,不必由连接有传感器的控制单元提供计算能力,而是由 ICAS 提供。因此,这类中央控制单元可以在多个诊断地址下作出响应,从而在将来减少了控制单元的数量。ICAS按照“分布式功能”原理,采用几个控制单元负责一个功能。ICAS技术是实现自动驾驶和用于客户车辆中软件更新(计算机层级的车载测试仪和客户功能)的前提条件,因此无需到访维修站或不再需要汽车故障诊断仪。
2.1 ICAS1车辆控制器(J533)
ICAS1车辆控制器(J533)是位于数据总线诊断接口地址19下的微控制器(诊断),通常主要负责最多8个不同CAN消息的实现/镜像。此外,中央控制单元还集成了负责大量其他功能的高性能微处理器(性能处理器),包括防盗锁止系统、组件保护、防盗报警装置、Kessy自适应/中央门锁、调光、疲劳识别系统、历史数据、驾驶模式选择、续航里程计算、标准车外照明灯、离车方案、显示协调器、时间周期、驻车协调器、低电压电源管理系统、高电压电源管理系统、高电压充电管理、接线端控制、可订购的功能主控制器等主控制器。在控制器本身层级上,此处理器还配备了2个用于MFL和AFS CAN的CAN收发器。为此,ICAS1车辆控制器(J533)再次在内部划分为4个分区,每个分区都可以通过单独的诊断地址(8123、8124、C002、C003)进行寻址。这些分区具有下述与车辆或客户功能有关的任务。
(1)Adaptive系统1的应用程序服务器1(8123)。它为ICAS3的3个显示器的服务器/CAN准备显示数据、车辆定位(用于远程服务和功能的位置)、控制充电管理服务器(用于充电程序、充电计时器、充电配置文件)和在线服务的消息存储器。
(2)Java系统2的应用程序服务器1(8124)。它为车载测试仪(目前在此协调控制单元的升级程序)、诊断服务和车辆状态数据服务器,控制车辆充电或温度调节的远程服务。
(3)嵌入式软件集群1(C002)。它负责个性化管理、复杂车灯系统、动态车灯辅助系统、矩阵前照灯控制,具有为 ICAS3准备备份记录和存储功能的里程计数器。
(4)软件集群内务1(C003)。它是性能处理器的“管家”,控制基础设施和IP路由。
2.2 ICAS3信息娱乐控制器(J794)
ICAS3信息娱乐控制器(J794)主要侧重于信息娱乐系统、车辆设置、诊断及导航服务,侧重于互动体验,通过不同的颜色、动态灯光信号给驾乘者提供操控状态反馈。处理器分为 2个分区——5F、8125。
(1)信息娱乐系统电子装置1(安全分区5F)是主要联系人,并且在原则上包含应在启动时尽快提供给客户的所有功能:针对中央显示屏、组合仪表(iID)和平视显示器(HUD)的显示控制系统(包括安全带未系警示消息、电量表、保养周期显示、消耗量),控制显示语言,倒车摄像头的视频解码,控制ID Light,控制音频驱动程序(例如仪表板警告音、外置声音放大器),车辆状态和统计数据(行程计算机),诊断服务的服务器。
(2)信息娱乐系统的系统1应用程序服务器3(8215)是所谓的IVI或“车载信息娱乐系统”,它包括内存和计算密集型功能:导航系统,收音机/媒体、音频管理、智能手机集成,触摸操作、语音操作,互联网、WLAN、USB接口,应用程序等。相比之下,它们需要更多的启动运行时间。
除了CAN收发器之外,ICAS3还具有一个图形处理器(GPU),该图形处理器作为LVDS总线参与者的网关和处理器。
3 网线总线架构
传统架构中主要以CAN协议传输数据,其中500 kbit/s的速率限制了MEB平台车辆的发展。新的网络总线架构,采用了“CAN+车载以太网”双主干网线总线架构。9组CAN网络,5组CAN FD(FD为可变的数据速率),通信速率最高可达2 Mbit/s,其余4组CAN网络通信速率为500 kbit/s。以太网可配置不同的通信速率,在单对非屏蔽双绞线上可实现从100 Mbit/s到最大1 Gbit/s的高速传输。
3.1 CAN FD总线
CAN FD总线是进一步开发的标准CAN协议。使用CAN FD的前提是在相应控制单元中安装了新的 CAN FD收发器。与使用数据传输阶段相比,在仲裁和确认阶段采用了不同的数据速率。也就是说,它们必须在一条和同一条消息中将仲裁阶段的“低”数据速率(500 kbit/s)在使用数据传输期间无缝切换到2 000 kbit/s的高速率。相反,这在过渡到确认阶段时也是必要的。
通过在仲裁和确认期间保持500 kbit/s的数据速率,CAN总线的物理特性在很大程度上保持不变,例如信号电平、线路反射或终端电阻。与经典版CAN一样,隐性电平保持在2.5 V,显性电平保持在3.5 V(高)和1.5 V(低);在500 kbit/s的速度时,一个比特位的传输时间为 2 µs,在 2 Mbit/s时为500 ns(图2)。
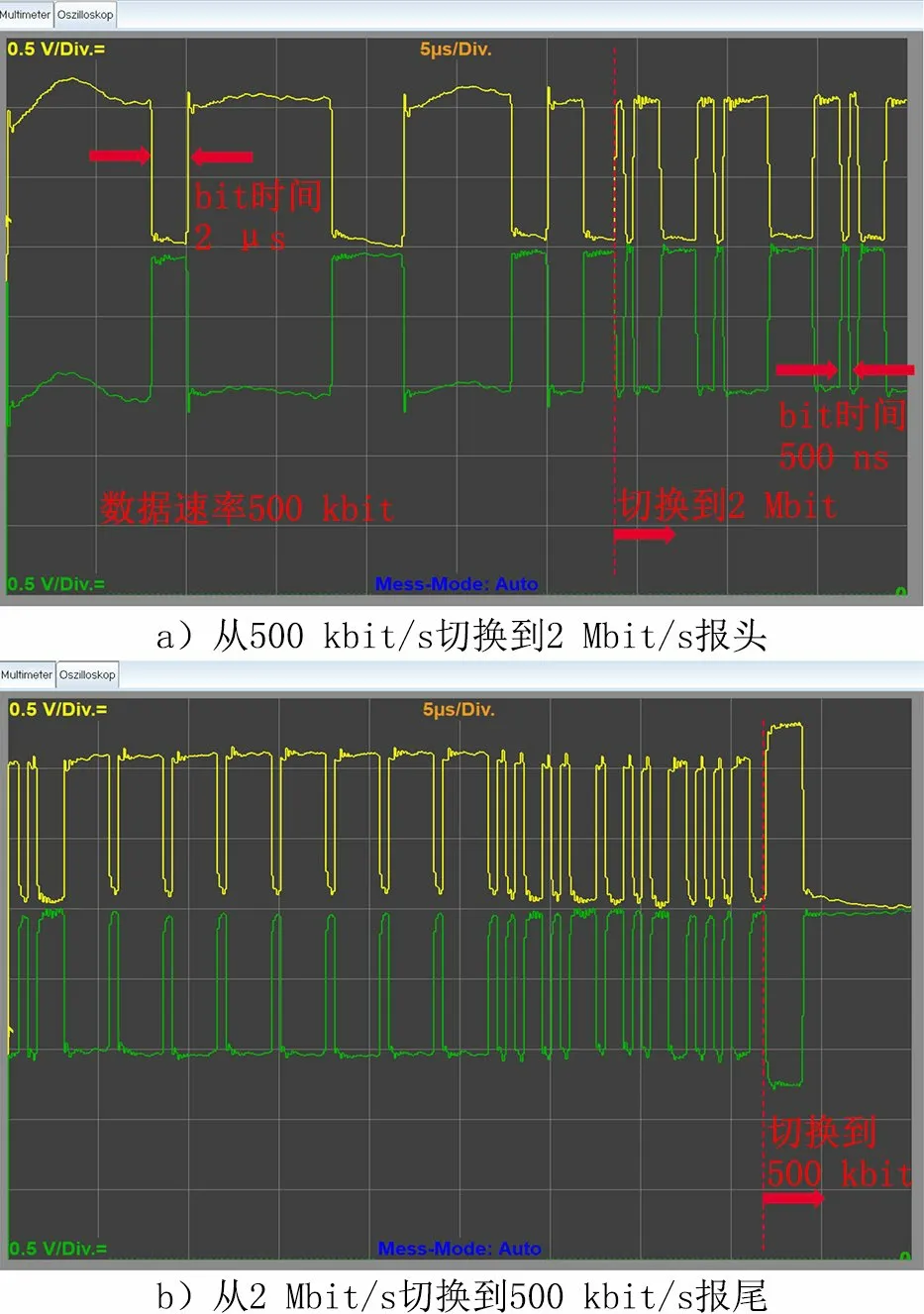
图2 CAN FD总线波形物理特性(截屏)
因此当CAN FD总线系统导线短路、断路或网关中出现故障,一样可以结合CAN的物理特性进行故障诊断。出现不同故障时波形是不一样的,可以通过测量波形进行故障诊断。当CAN-H和CAN-L波形重叠且为0 V时,说明2根线处于休眠状态,无故障;当CAN-H和CAN-L波形重叠且为2.5 V左右时,诊断为线路互短故障(图3);当其中一个波形采集出靠近0 V变化,另一个波形为0 V时,诊断为0 V总线对搭铁短路(图4和图5);当其中一个波形采集出靠近蓄电池电压变化,另一个波形为蓄电池电压时,诊断为蓄电池电压的波形对蓄电池电压短路(图6和图7)。对于总线断路故障,可以直接使用万用表通过电阻法判断导线通断即可。
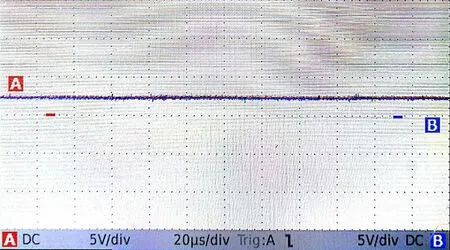
图3 CAN-H和CAN-L互短(截屏)

图4 CAN-H对搭铁短路(截屏)
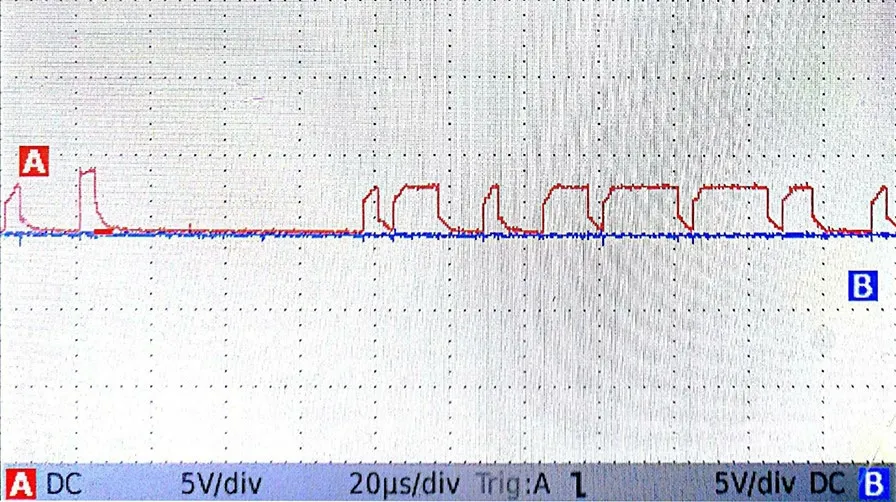
图5 CAN-L对搭铁短路(截屏)
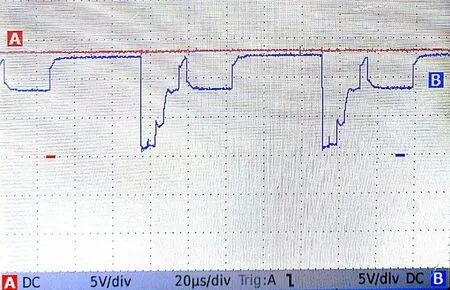
图6 CAN-H对电源短路(截屏)
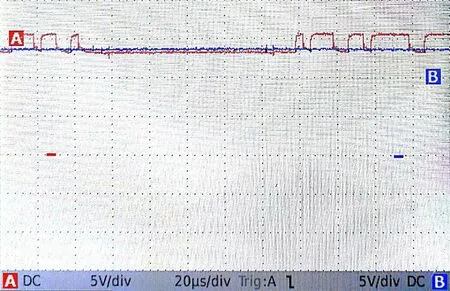
图7 CAN-L对电源短路(截屏)
3.2 以太网
以太网是一项使用电缆连接的网络技术,ICAS1中集成了以太网的主控单元,可实现从100 Mbit/s到最大1 Gbit/s的高速传输。针对以太网通信,OBD诊断接口重新分配了插针3、8、11、12 和13。如图8所示,本车型采用了3种以太网连接类型。ICAS1与诊断接口之间通过2个没有附加屏蔽层的双绞线连接,可以实现同步双向通信。ICAS1与ICAS3之间的导线带有屏蔽层,具有启用导线功能。
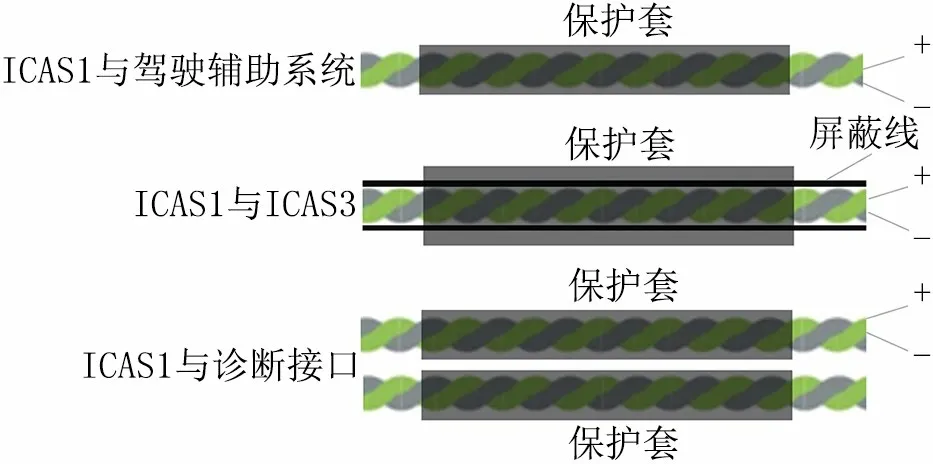
图8 以太网连接类型
综上所述,在厘清了大众ID.4电气联网系统后,结合电路图分析具体针脚定义就能进行车辆相关故障诊断与排除。当出现电气故障时,可以通过多个控制单元无法通信来判断是否为总控共性故障;再通过采集总线波形可进一步判断是总线故障还是总供电或总搭铁故障;再进一步通过万用表测量电压、电阻等方法进行线路判断。如以上线路都没问题,则更换控制单元或电气组件。
猜你喜欢
航空学报(2022年7期)2022-09-05
汽车零部件(2022年7期)2022-08-03
科学家(2021年24期)2021-04-25
汽车与驾驶维修(维修版)(2020年2期)2020-01-07
计算机世界(2018年25期)2018-09-17
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05
现代电子技术(2009年8期)2009-06-25