一种基于循环梯级的海洋垃圾处理装置
2022-09-14 06:36张志高吴丽晓崔志远徐子宇王礼杰
科学技术创新 2022年25期
张志高,吴丽晓,崔志远,徐子宇,王礼杰
(河南科技大学机电工程学院,河南 洛阳 471003)
工业发展使得地球海洋环境日趋恶化,塑料垃圾、工业废弃物和生产污水随着河流冲入海水之中,对海洋的环境造成了破坏,大规模污染导致海洋生物因缺氧而死亡,降低海洋生产能力。其中,塑料垃圾数量最大,占海洋垃圾总数的85%,包括塑料瓶、塑料袋和渔网,它们难以自然分解,长期漂浮在海水中。如果不采取相应措施,人类社会也将受其影响。目前,国内海洋垃圾处理方式主要包括人工和机械两种。一种是通过传统人工打捞清理垃圾,这种方式具有范围小、耗时长、难度大的特点,难以彻底清除海洋垃圾;另一种则是通过人工驾驶机械装置进行清理,劳动强度低,打捞速度快,但采用燃油驱动会对空气造成污染,且普及度不高。因此,设计一款简单、高效的海洋垃圾处理装置是必要的[1]。
针对这些问题和现状,从海洋垃圾的处理装置的要求出发,依据自动扶梯式的原理结构,设计一款能够实现对海洋漂浮垃圾的处理装置。
1 系统总体设计
本系统主要由垃圾采集装置、垃圾储存装置、车身主体、控制系统、驱动系统、定位系统、动力系统组成,整个装置是基于STM32 单片机的控制系统进行控制,以控制系统为中心,通过驱动单元为装置提供动力,车身基本框架底部采用密封设置,为整个装置稳定漂浮在水面提供了有利的条件,垃圾采集装置参照自动扶梯原理,通过改良和升级原有的结构,最终借鉴采用循环梯级运动的原理,装置各个系统相互配合实现水面垃圾的采集、传送、储存,从而完成水面垃圾的清理工作[2]。
1.1 循环梯级结构设计
循环梯级的结构参考了自动扶梯原有的结构,并且在原有的结构的基础上进行升级和改进,将原有的台阶更换为V 截面的垃圾收集单元,下端删除原有结构的水平移动端,更容易实现垃圾从水中分离,上端保留水平移动端,从而可以增加储存结构体积,也更容易实现垃圾与收集单元的分离,使其更加适应水面垃圾采集工作。此结构在驱动电机的转动下,实现整个结构的循环转动,每个采集单元上方两个轮子相连组成闭环由电机经过减速后直接驱动,下侧轮子在轨道中不同的位置可以更改每个采集单元不同的角度,采集单元从在水下绕圆周旋转150°,在旋转过程中将垃圾从水面进行采集,采集后沿着轨道进行运行,直到运行至储存结构上方,采集单元绕圆周运动旋转,由于重力作用,每个采集单元垃圾脱落,完成一次的垃圾清理工作。在驱动装置提供动力下,循环往复在规划的既定路线下完成指定区域的垃圾清理工作,见图1。
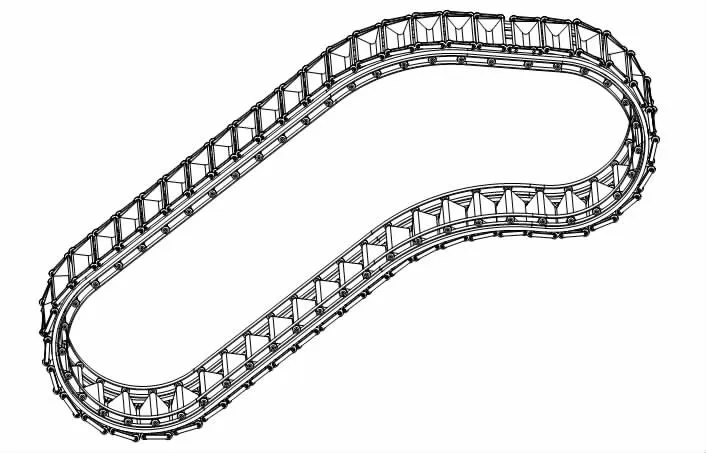
图1 循环梯级结构示意简图(不含驱动装置)
1.2 垃圾储存结构设计
垃圾储存结构使用铝型材搭建,为了方便垃圾的清理工作,将垃圾储存结构通过快拆装置安装在装置框架上,从而提升垃圾清理的效率。
1.3 装置基本框架的设计
框架采用铝型材进行搭建,铝型材通过角码可以快速连接,同时能够降低总体成本,减少制造、加工、组装时间,还可以使各种装置在框架上安装简单,通过T 型螺母紧固,方便拆装。考虑在陆地上移动方便,框架安装四个万向轮方便移动。在框架底部四轴固定气包,为装置在水中工作提供浮力,为稳定工作提供保障[3]。
1.4 控制系统设计
1.4.1 主控芯片选择
主控芯片采用STM32F103RCT6 为Cortex-M3 内核,MCU 运行频率最高达72 MHz,程序存储器容量是256 KB,程序存储器类型是FLASH,RAM 容量为48 K、多种外设、USB 接口和CAN。此系统中,主控芯片主要任务为读取姿态传感器IMU 数据、GPS 数据、遥控器信号、为驱动装置提供驱动信号,因此此款芯片性能可以满足使用要求。
1.4.2 动力驱动系统选择
考虑到工作环境的复杂性,本次动力元件全部使用步进电机提供动力,步进电机是一种将电脉冲信号转换成角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。根据装置大小以及实际运行功率需求,最终选择雷塞86CM85D 开环步进电机,此电机最大输出扭矩8.5 Nm,额定工作电流为6 A,步进电机驱动器最终选择M860D 开环步进驱动器,内置平滑滤波功能电流峰值最高可达7.2 A,同时具有参数自动整定功能,精密电流控制减少电机发热,并且具有过流过压保护功能。
1.4.3 GPS 模块以及姿态传感器IMU 选择
GPS 模块选择为AT6558R 定位模组BD-280ZR,模组水平定位精度2 m,通过TTL 电平,使用NMEA-0183 协议进行数据传输,最高可支持波特率921 600 bps, 数据更新频率1 Hz~10 Hz,满足使用需求。MPU9250 内部集成有3 轴陀螺仪、3 轴加速度计和3轴磁力计,输出都是16 位的数字量;可以通过集成电路总线(IIC)接口和单片机进行数据交互,传输速率可达400 kHz/s。陀螺仪的角速度测量范围最高达±2000(/s),具有良好的动态响应特性。加速度计的测量范围最大为±16 g(g 为重力加速度),静态测量精度高。磁力计采用高灵度霍尔型传感器进行数据采集,磁感应强度测量范围为±4800 μT,可用于对偏航角的辅助测量。
MPU9250 自带的数字运动处理器(DMP:Digital Motion Processor)硬件加速引擎,可以整合九轴传感器数据,向应用端输出完整的9 轴融合演算数据。
有了DMP,我们可以使用InvenSense 公司提供的运动处理库(MPL:Motion Process Library),非常方便的实现姿态解算。
1.4.4 无线通讯模块选择
无线通讯模块选择为HC-05 蓝牙模块,蓝牙HC05 是主从一体的蓝牙串口模块,简单的说,当建立连接,两设备共同使用一通道也就是同一个串口,一个设备发送数据到通道中,另外一个设备便可以接收通道中的数据。蓝牙通讯方便快捷,可以通过手机等便携设备进行通讯。
1.4.5 程序设计
装置启动后,初始化并检查各个传感器状态,初始化完成后等待任务下发,通讯装置接收到任务后,通过读取姿态传感器IMU 和GPS 模块数据得到当前所处位置和姿态信息,读取当前任务,从而实现路径规划,最终实现水面垃圾清理工作,完成最终工作后,并自动回到原点。
2 工作原理
见图2。
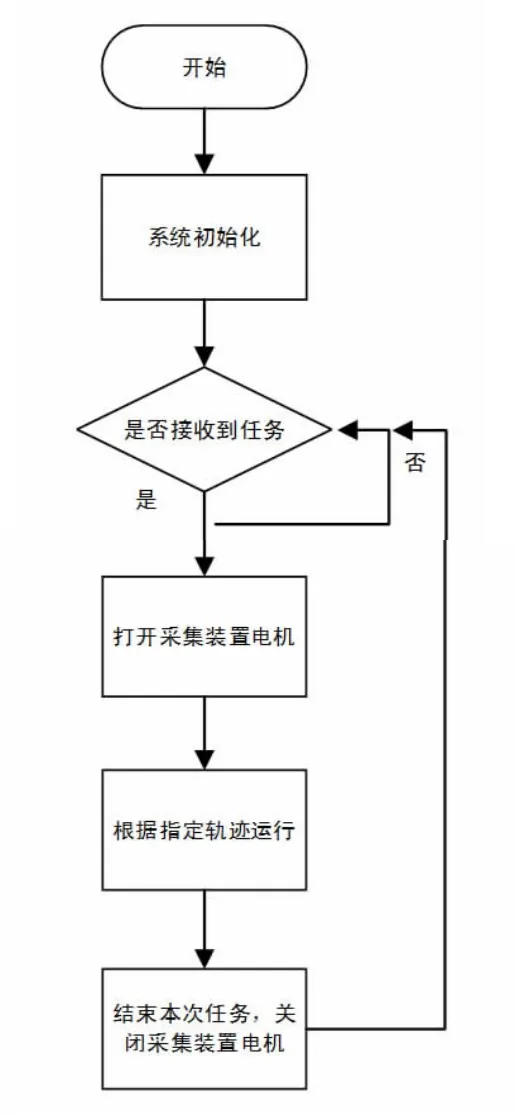
图2 工作原理图
装置启动后,接收到工作任务后,默认打开梯级循环机构驱动电机,每一个采集单元从水面采集垃圾(见图3),每个垃圾采集单元配备三个轮子,上测轮子沿着固定轨道完成整个装置的旋转往复运动,下测轮子随着轨道的变化,继而继而可以改变每个垃圾采集单元的旋转角度(见图4),完成垃圾的自动卸载至储存箱。通过循环往复自动实现垃圾收集、存储和再收集。主控系统通过读取当前任务路线,读取姿态传感器IMU 和GPS 模块数据,获得当前运行状态和运行方向,通过不断修正位置从而完成路径规划,实现指定水域的垃圾清理与储存任务,当任务完成或垃圾储存装置装满之后自动回到原点,完成任务或清理储存垃圾后继续执行任务从而直到最终任务完成[4]。
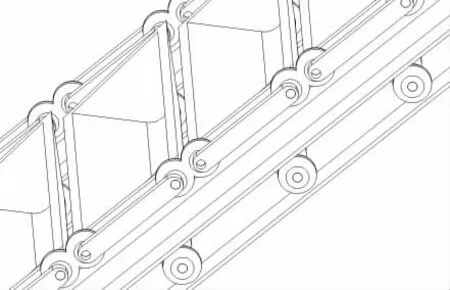
图3 采集单元转运状态
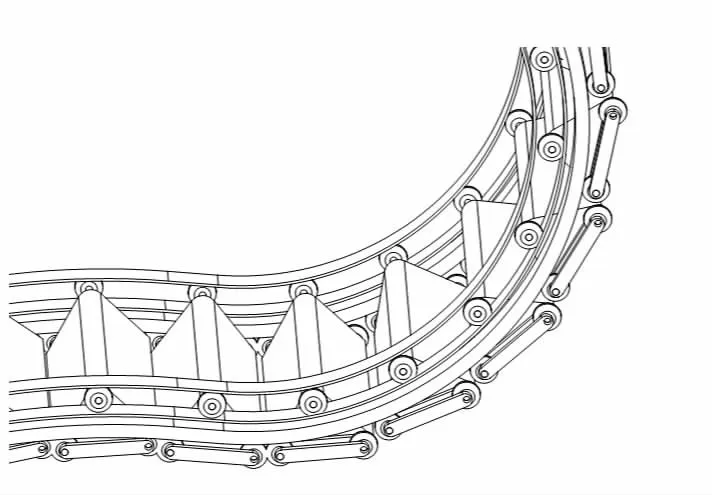
图4 采集单元卸载状态
3 系统优化
3.1 硬件优化
实际运行过程中,发现垃圾收集单元从水中采集时垃圾容易脱落,导致每个采集单元实际垃圾采集量偏少,其次在运送过程中垃圾也容易脱落。为此,我们改良每个垃圾采集单元,更改其采集单元外观,将底部角度变小,由于重力作用,防止垃圾在传送中脱落其次,也更容易从水中采集出垃圾,见图5。
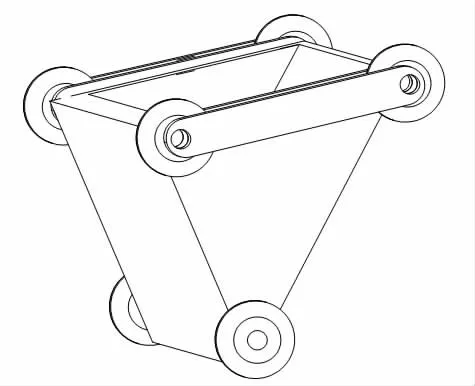
图5 优化后的采集单元
3.2 程序优化
由于GPS 定位精度误差在2 m 以内以及磁力计陀螺仪存在噪声误差,单纯依靠GPS 工作或者磁力计陀螺仪势必会带来较大误差,因此我们通过结合陀螺仪数据进行路径规划与单独使用单一数据进行对比,首先我们将装置在道路上进行实地测试,通过对比实际运行轨迹与设定轨迹(直线),进行三次对照组测试实验分别单独使用GPS、磁力计陀螺仪和将GPS 与磁力计陀螺仪数据融合得出了下面三组实验数据。此次实验选定9 m 直线,每运行1 m 数据采集一次,共采集9 次。采集数据见表1,通过对比可以明显得出融合数据在一定程度下可以减小偏差。

表1 不同数据下与设定直线的偏差(cm)
4 结论
通过装置机械结构、控制系统的设计并结合实际制作过程中所遇见的问题,我们改良了以下几个方面,首先,由于工作环境在水面上,必须优化控制系统,做好防水工作,防止控制系统由于水引起的短路和其他不稳定情况的产生。其次,优化传动机构,将链传动更换为带传动,从而防止由于水面工作导致链条生锈造成传动系统不稳定。最后,增加控制系统的抗干扰性和稳定性,通过读取各个传感器数据对装置工作状态进行预估,从而保护好装置,以免由于硬件问题装置继续工作从而造成更大的损失[5]。
本研究主要介绍了一种适用于海洋垃圾采集、存储为一体的海洋垃圾清理装置。提出了一种基于循环梯级的新型机构,在原有自动扶梯结构基础上进行优良改进,更加适应垃圾清理工作。通过机械结构与优良控制系统的紧密结合,从而达到更好的清理效果。
猜你喜欢
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
北京航空航天大学学报(2021年9期)2021-11-02
房地产导刊(2020年11期)2020-12-28
今日农业(2020年24期)2020-12-15
当代陕西(2019年8期)2019-05-09
劳动保护(2018年8期)2018-09-12
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
小猕猴学习画刊(2016年12期)2017-01-05