基于红外测温技术的高温热源定位实验研究
2022-09-16 07:25常清洋郭立稳武建国庞凤岭
煤矿安全 2022年9期
常清洋,郭立稳,2,武建国,庞凤岭
(1.华北理工大学 矿业工程学院,河北 唐山 063210;2.河北省矿业开发与安全技术重点实验室,河北 唐山 063210;3.开滦(集团)有限责任公司,河北 唐山 063000)
采空区遗煤氧化放热形成的高温热源具有隐蔽性和不可接触性,因此高温热源的精准定位是采空区火灾防治的关键[1]。目前国内外学者对采空区高温热源温度场的研究主要以数值模拟、现场监测和相似实验为主[2-7]。在数值模拟方面,丁鹏翔[8]利用数值模拟确定了采空区自燃“三带”的分布,通过在自燃带不同位置设置热源点研究了灾害气体和温度场的分布规律;高东等[9]通过现场实测数据,采用数值模拟方法分析了采空区孔隙率的分布,完成了对采空区自燃危险区域的划分。在现场监测方面,曹健[10]通过数值模拟研究结合现场试验,确定了自然危险区域并对易自燃区域铺设测温光纤光缆,实现了对易发火区域的实时温度监测;郑园等[11]利用分布式光纤测温技术对采空区进行长距离的连续测温,光纤长度小于10 km 的测温误差为±2 ℃,定位精度为2 m;程根银等[12]分析了光纤测温技术的优点,将其运用于采空区实现了对自燃“三带”的划分。在相似实验方面,陈清华等[13]通过建立地面试验煤堆,在煤堆中铺设热电偶进行测温,分析了高温热源影响下的煤体温度分布和变化规律;杨永辰等[14]利用红外热成像仪对电热丝在煤体中的温度分布情况进行模拟研究,通过对比模拟与实测结果验证了红外测温技术在采空区热源定位中的可行性;针对红外测温技术的系统误差,杜玉玺等[15]通过分析距离对红外热像仪测温精度的影响,提出了温度随距离变化的分段补偿模型,将温度相对误差控制在0.59%以下;由于红外热像仪对热源的监测距离有限,沈亚楠等[16]利用红外测温传感器研究了动态和稳态热源下的传感器温度变化规律,推导了温度修正曲线k,最终将测温误差控制在2.8%左右。
热电偶测温技术和分布式光纤测温技术为接触式测温,应用于采空区测温时均需要铺设较长的线路,系统成本较高且后期的维护不便[17];红外测温技术不仅能实现非接触测温,还具备响应速度快、灵敏度高等特点[18]。为此,在实验室条件下利用人工热源模拟遗煤自燃温度场,使用非接触式红外测温传感器进行高温热源温度监测实验,分析热源温度、升温时间、传感器测定温度和测温距离之间的关系,建立理想情况下高温热源定位的拟合方程,优化数据拟合误差和红外测温装置的系统误差,提高高温热源的定位精度。
1 非接触红外测温实验方案
自然界任何高于热力学零度(-273 ℃)的物体都在不停地向外辐射红外能量[19]。随着温度的升高,高温热源向外界发射的红外光波也随之增多,当红外光波经过空气介质传输到红外探头上时,探头内的光学系统对接收到的红外光波进行处理并转化为电信号,再通过放大电路和补偿电路及线性处理后在显示器上输出实测温度。
在实验室进行高温热源红外测温实验,实验环境温度为26~33 ℃。设置单一热源,热源为80 cm×60 cm×5 cm 的电热板,电热板外接温度调节器,调节温度范围为0~250 ℃,以模拟不同发热强度的高温热源。每组红外测温传感器由4 个探头和1 个显示器组成。探头测定物体温度,显示器实时显示4 个探头测定的温度值,并将各时刻测定的温度值储存在芯片中,待1 次实验结束后可直接导出数据。无风条件下以热源点为中心,热源温度近似呈圆形扩散,因此实验将测温传感器均布置在热源的同一侧。在热源前方布置5 组测温传感器,依次编号为Ⅰ~Ⅴ,距热源距离依次为2、4、6、8、10 m,每组传感器红外探头间距为0.2 m。实验设定每分钟记录1 次热源温度和传感器测定温度。红外测温传感器布置图如图1。
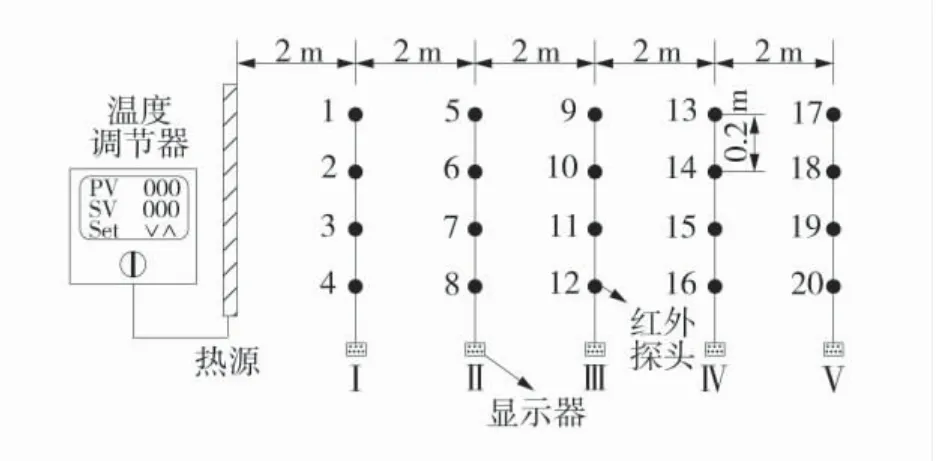
图1 红外测温传感器布置图Fig.1 Infrared temperature sensor layout
实验步骤具体为:
1)布置热源和测温传感器。
2)连接电源,调节5 组测温传感器时间同步。
3)将测温传感器进行充分预热,当5 组传感器温度均趋于环境温度并稳定时进行下一步操作。
4)开启热源温度调节器,将热源温度设定为250℃,记录实验开始时间和热源初始温度。
5)每间隔1 min 记录1 次热源温度和传感器测定温度。
6)热源温度达到250 ℃时,记录实验终止时间。
为解决热源温度可能出现分布不均匀的问题,同时降低传感器测温误差,实验过程中取每组测温传感器4 个探头所测温度的平均值作为该组测温传感器最终的测定温度。为排除环境因素对实验结果的影响,做假设:①电热板为单一的高温热源,热源温度仅是时间的函数;②实验在理想条件下进行,实验过程中没有障碍物的干扰。
2 实验结果分析
2.1 热源温度变化规律
记录热源从初始温度(26 ℃)升温至250 ℃的时间和每分钟的温度值。热源温度随升温时间变化曲线如图2。
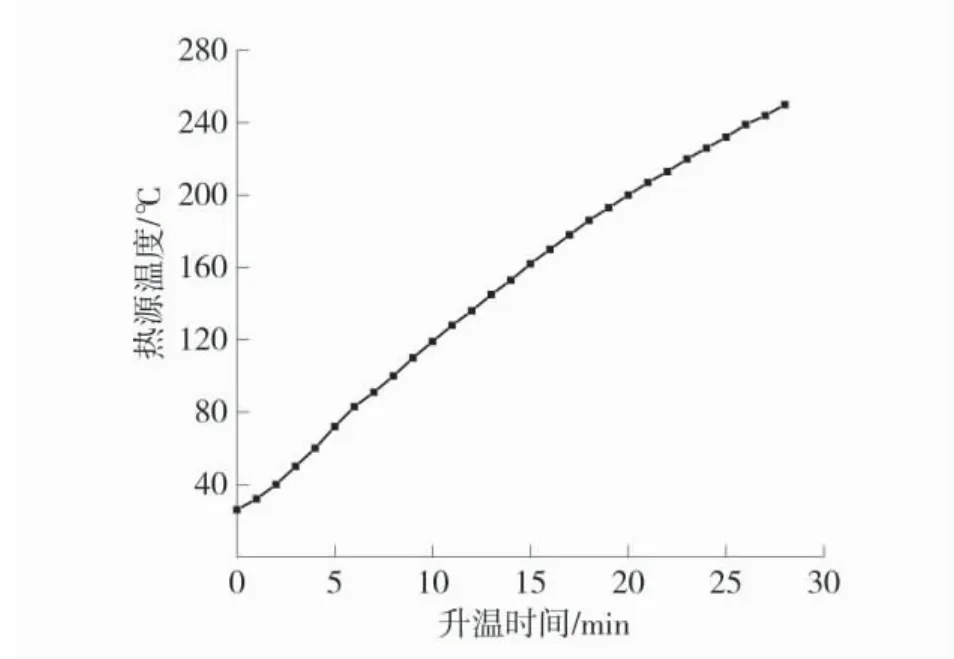
图2 热源温度随升温时间变化曲线Fig.2 Variation curve of heat source temperature with heating time
由图2 可知,热源温度随升温时间的增加呈二次函数变化。热源温度从26 ℃升温至250 ℃用时28 min,热源温度变化速率呈现先增加后减小的趋势。升温前热源温度与周围空气温度处于热平衡状态,由于热源的吸热能力比空气高,随着升温时间的增加,热源先上升高更高的温度,当热源温度高于周围空气温度后,热源开始向周围空气传递热量,直到两者温度再次达到热平衡状态。随升温时间的增加,热源始终处于不断吸收热量和向周围空气传递热量的过程;当吸热速率一定时,热源温度越高且与周围空气温差越大则需要向空气传递的热量越多,热源升温速率则逐渐减小。热源温度随升温时间的变化如式(1):

式中:T0为热源温度,℃;t 为升温时间,min。
2.2 传感器测温规律
不同距离处的传感器测定温度随热源温度变化曲线如图3。
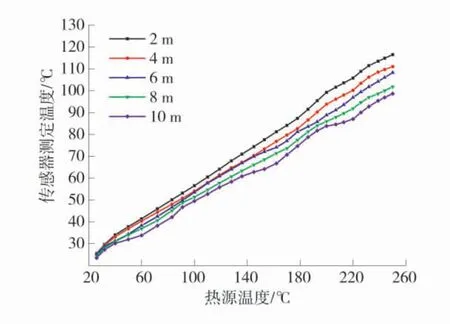
图3 传感器测定温度随热源温度变化曲线Fig.3 Variation curves of temperature measured by sensor with heat source temperature
由图3 可知,不同距离处的传感器测定温度均随热源温度的升高呈线性增长,同一热源温度下传感器测定温度随测温距离的增加而降低。传感器测定温度随热源温度和测温距离的增加有明显的波动,热源温度越高且测温距离越远波动越明显;距热源2、4、6、8、10 m 传感器温度出现首次波动对应的热源温度依次为210、180、160、90、50 ℃。当热源温度低于100 ℃时,不同距离测点的温度差值较小,热源温度对传感器测定温度的变化起主导作用;当热源温度高于100 ℃后,不同距离处传感器测定温度差值逐渐增大,此时测温距离和热源温度同时影响传感器测定温度的变化。随着热源温度的升高,不同测温距离处传感器测定温度增长趋势一致,说明红外测温传感器测温灵敏且响应速度快。通过对实验数据进行回归分析,得到传感器测定温度随热源温度变化的函数式如式(2):

式中:T 为传感器测定温度,℃;k 为传感器温度接收率。
不同测温距离处的传感器温度接收率拟合系数见表1。
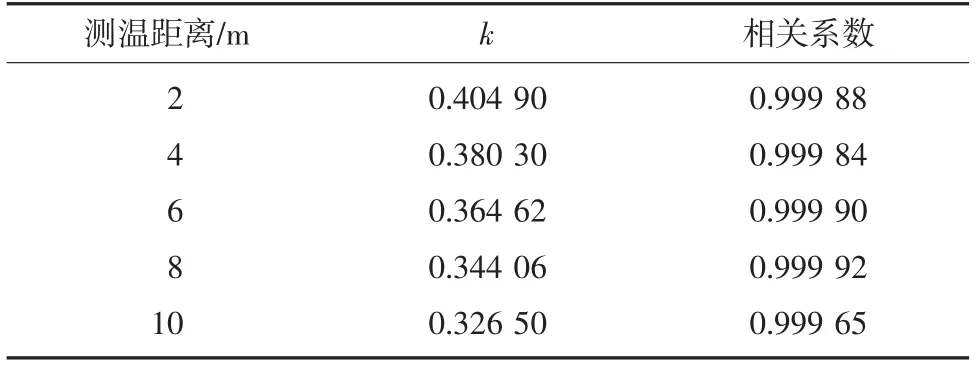
表1 不同测温距离处传感器温度接收率拟合系数Table 1 Fitting coefficients of temperature receiving rate of sensor at different temperature measurement distances
由表1 可知,同一热源温度下传感器温度接收率与测温距离呈反比,传感器温度接收率与测温距离的关系如式(3):

式中:d 为传感器测温距离,m。
2.3 传感器测温距离
实验中热源升温速率由温度调节器的功率决定,因此热源的温度只与升温时间有关。热源和测温传感器时刻保持时间同步,通过红外测温传感器温度变化的时间得到热源的升温时间进而确定热源的温度;再由热源温度和传感器测定温度得到传感器测温距离,从而实现利用红外测温技术监测热源温度和定位热源距离的目的。由式(1)~式(3)可得出传感器测温距离的方程如式(4):

3 误差分析与修正
3.1 误差分析
对拟合的热源温度、测温距离与实测结果进行误差分析,实测结果与拟合结果误差图如图4。
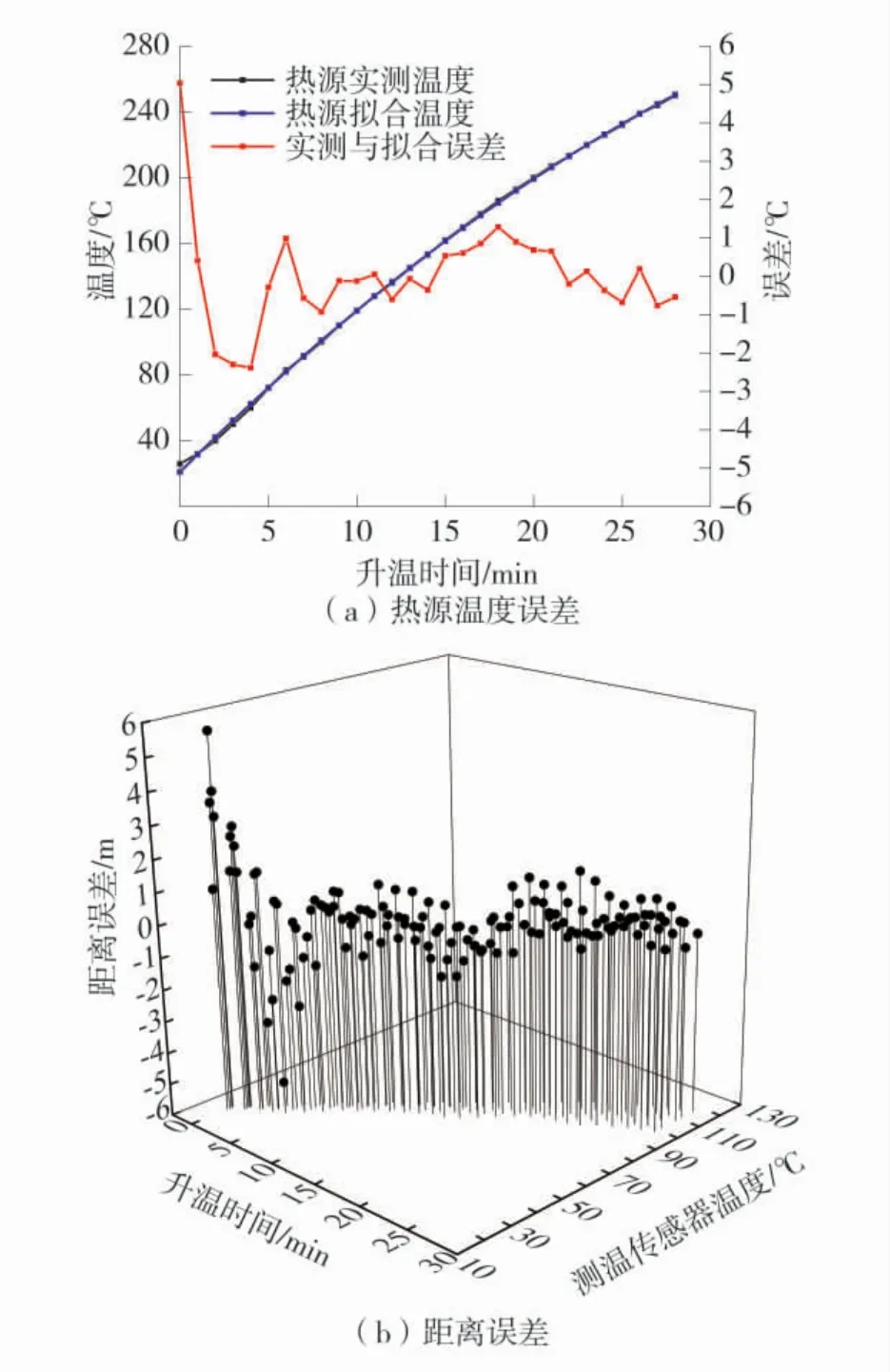
图4 实测结果与拟合结果误差图Fig.4 Error diagram between measured results and fitting results
由图4(a)可知,热源温度低于83 ℃(0~6 min)时,实测与拟合热源温度误差较大,最大误差为5.03 ℃;热源温度高于83 ℃(6~28 min)时,实测与拟合热源温度的误差范围为±1 ℃。由图4(b)可以看出,实测距离与拟合距离误差的绝对值>2 m 均分布在0~6 min;误差绝对值>2 m 占总数的7.59%,误差范围为±1 m 仅占总数的75.86%。结合红外测温原理与实验结果分析,影响热源测温精度和定位精度的误差来源于2 方面:一是数据分析处理过程中产生的拟合误差;二是传感器测定温度随热源温度和测温距离的影响产生的测温误差,属于系统误差。
3.2 误差修正
3.2.1 拟合误差修正
在热源温度变化速率不同的阶段,热源温度的变化不能用单一的模型来衡量。依据热源升温速率在0~6 min 和6~28 min 的变化过程,建立基于温度变化速率的热源温度-时间分段拟合模型,分段拟合模型如式(5):

式中:T0′为热源温度修正值,℃。
3.2.2 系统误差修正
传感器测定温度的实测值和拟合值的平均误差属于系统误差,系统误差为:

式中:ε 为系统误差,℃;m 为测温距离组数;n为热源升温时间总步数;△Tit为t 时i m 处的传感器测定温度实测值与拟合值的误差,℃。
测温传感器拟合温度随热源温度呈一次函数变化,而实测温度则受热源温度影响处于不停的波动状态。为降低传感器测温误差,提高测温传感器对热源的定位精度,依据传感器测温误差的变化情况,建立传感器实测温度迭代补偿模型如式(7):
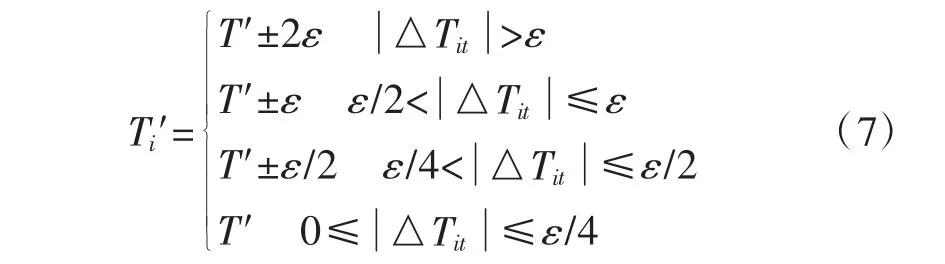
式中:T′为传感器温度实测值,℃;Ti′为第i 次补偿后的传感器温度实测值,℃。当均不超过ε/4 时,迭代结束。
误差修正前后对比图如图5。

图5 误差修正前后对比图Fig.5 Comparison diagrams before and after error correction
由图5 可知,误差修正后的热源温度最大绝对误差由5.03 ℃降低至0.89 ℃,热源温度平均绝对误差由0.78 ℃降低至0.41 ℃,热源温度最大相对误差由19.3%降低至0.48%。传感器实测温度经3次迭代后完成温度补偿,随着迭代次数的增加,测温距离平均绝对误差由0.77 m 依次降低至0.27、0.12、0.10 m,红外测温传感器的测温精度和对热源的定位精度明显提高。
4 结 语
1)通过对模拟采空区高温热源进行红外测温实验,结果表明热源温度随升温时间呈二次函数变化,热源升温速率呈先增大后减小的变化趋势;传感器测定温度随热源温度和测温距离的增加波动明显,传感器测定温度与热源温度呈正比,传感器温度接收率与测温距离成反比。
2)通过分析热源温度、升温时间、传感器测定温度和测温距离的关系,推导了理想条件下红外测温技术的热源定位方程。
3)针对数据的拟合误差和测温传感器的系统误差,建立了基于热源温度变化速率的热源温度-时间分段拟合模型和传感器实测温度迭代补偿模型。修正后的热源温度最大相对误差由19.3%降低至0.48%;测温距离平均绝对误差由0.77 m 降低至0.1 m。红外测温传感器的测温精度和对热源的定位精度均得到有效提高。
猜你喜欢
农业开发与装备(2022年8期)2022-10-10
舰船电子工程(2022年5期)2022-06-21
科学导报(2022年24期)2022-05-19
舰船电子工程(2022年2期)2022-03-14
环球时报(2020-05-22)2020-05-22
世界家苑(2018年10期)2018-11-10
建筑建材装饰(2017年7期)2017-07-04
哈尔滨理工大学学报(2016年1期)2016-05-31
企业文化·中旬刊(2015年3期)2015-04-27
劳动保护(2014年7期)2014-09-01