基于双平行马赫曾德调制器的微波光子测向技术研究*
2022-09-24 06:47张业斌
电子技术应用 2022年8期
张业斌 ,王 凯 ,童 阳
(1.中国电子科技集团公司第三十八研究所,安徽 合肥 230088;2.安徽省天线与微波工程实验室,安徽 合肥 230088)
0 引言
现代战争中对战场电磁环境的全面感知至关重要,是决定这战争成败的关键因素之一。电子侦察[1-2]就是获得战场态势继而控制战场主动权的重要手段,通过接收和分析敌方的雷达等主要电子信息系统的电磁信号,在空间上精确定位目标、识别敌方目标才能更有针对性地开展干扰、欺骗甚至摧毁等有效的电子对抗。微波信号测向技术是电子侦察技术的重要组成部分,通过测向可以判定敌方雷达等辐射源的方向,结合距离探测便可进而定位到敌方目标的精确位置。微波测向系统可以提供敌方辐射源所在的方向或者位置。根据工作的方式测向技术一般分为两个大类,即主动测向技术和被动测向技术。主动测向技术主要是雷达系统采用,通过系统本身产生信号并通过天线辐射出去,再接收反射回来的电磁波信号,通过在一定的角度范围内扫描,并根据信号的大小来判断目标信号的空间位置、敌方所在的位置。该方法由于接收的是己方发射的特定频率和制式的信号,因此系统的接收带宽要求不高,但由于其本身也是个辐射源,从而导致其辐射的电磁信号也容易被敌方捕获进而被打击的风险大大提高。被动测向技术是只通过捕获和接收敌方目标主动辐射的电磁信号,进行分析从而得出其方向和位置信息,系统本身并不主动产生和向外辐射电磁射信号。因此,相对主动测向技术,被动测向技术具有更强的隐蔽性,但由于其接收和分析的是未知频率的电磁信号,故对接收系统的带宽要求一般较高。
随着电子技术水平的不断提高和军事装备的快速发展,通信、雷达、电子战[3]等电子系统对信号处理的要求也越来越高,其工作带宽越来越大,工作频率也越来越高,这也给传统的电学测向方法带来了很大的挑战。在高频段工作时传统的微波电路的瞬时带宽很难做大,同时在工作带宽内的幅频响应也较差,微波传输线的高频损耗也会急剧增加,并且传统电子系统进行超宽带信号处理时往往需要多台设备的堆叠,导致其体积和功耗也较大,并且容易受电磁干扰。受到上述这些“电子瓶颈”的限制,使得其很难满足电子装备发展的需要。微波光子技术[4]相对电子技术具有工作带宽大、带内平坦度好、抗电磁干扰等优势,因此得到了广泛的关注。微波光子技术有望突破现有电子技术的瓶颈,一般对于10 GHz以上带宽的超宽带射频信号的测向精度要求在3°以内,一些基于微波光子技术的微波信号测向系统[5-10]相继被提出且其测向精度也达到2°甚至更低,但系统对器件、设备量等的要求均较高。
1 微波光子测向技术原理
本文所提的基于微波光子的测向方法,主要是利用两路光学调制信号的干涉,构建出相位差与光功率的映射关系,再通过对光功率的测量实现对宽带微波信号的实时相位差测量,继而推导出微波信号的来向。采用双平行马赫曾德调制器(DP-MZM)来实现两路信号的调制和叠加。双平行马赫曾德调制器的上下两个子调制器均工作在载波抑制双边带模式,并控制两个调制信号的相位差再进行相干叠加和干涉。为了消除直流项对测量信号的干扰,干涉后光信号采用平衡探测的方法来提高系统的测向的精度。基于双平行马赫曾德调制器的微波光子测向的原理框图如图1 所示。

图1 基于双平行马赫曾德调制器的微波光子测向原理图
激光器输出的光载波信号输入到双平行马赫曾德调制器中。设进入双平行马赫曾德调制器的光载波的表达式为:

其中E0与ω0分别为信号的幅度和角频率。如图2 所示,天线阵面接收回来的两路射频信号分别加载在双平行马赫曾德调制器的两个射频输入口上,设两路射频输入信号的表达式为:
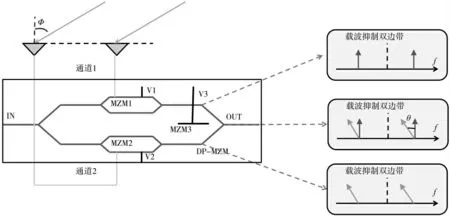
图2 双平行马赫曾德调制器各节点处的输出信号光谱图

其中E1m(t)、E2m(t)分别表示加载在第一、第二子调制器上的射频信号,Em表示两个天线阵元接收到的信号幅度,φ 表示两个阵元接收的微波信号之间的相位差。
通过控制调制器的直流偏压,使得第一子调制器和第二子调制器均工作在载波抑制双边带工作模式,即最小偏置点。由于天线前端接收到的信号一般都比较小,因此忽略高阶级(2 阶以上)的信号,经过第一子调制和第二子调制后的光信号分别可以表示为:

其中:m 表示射频信号的调制深度,如式(6)所示;J±1(m)分别为对应调制深度的±1 阶贝塞尔函数的值。

第一子调制和第二子调制的输出光信号经过第三子调制后合束输出,通过控制双平行马赫曾德调制器的第三个偏置电压,在两路光信号之间额外引入一个相位差,其输出表达式为:

其中θ 为第三马赫曾德调制器上加载的直流偏压所引入的相位差。
经过双平行马赫曾德调制器后的光信号经光耦合器后分为上、下两路,两路光信号分别经过光滤波器进行滤波,上路只有上边带光信号输出,光信号的下边带被滤除。同样下路只有下边带光信号输出,光滤波器将其上边带光信号滤除。经过滤波后的上、下两路光信号在进入平衡探测器前其光信号的表达式可以写为:

故而进入上光探测器的光信号的能量表示为:
同时进入下光探测器的光信号的能量表示为:

从上述的分析可以看出,当通过设置第三子调制器的偏置电压引入第一、第二马赫曾德调制器输出光信号之间的相位差θ 为90°时:

从上式可以看出,进入平衡探测器的上下两路信号含有两路被测信号相位差的余弦项有180°的相位差,因此经过平衡探测器后的信号输出为:

其中R 表示探测器的响应度。
通过测量探测器输出信号的大小,就可以直接得出相位差信息,并推算出微波信号的来波方向。从平衡探测器的输出表达式可以看出,通过平衡探测可以将不含相位差信息的直流无关项消除,从而减小其对信号项的干扰,可以提高测量系统对相位差的测量精度。一般用归一化处理后的值来评估方向角Ф,其表达式为:

其中,In是归一化后的探测输出信号,而Io是来波方向为正向时测量出来的输出信号值。
2 系统仿真实现与结果分析
根据上述的基于双平行马赫曾德调制器的微波光子测向技术方案,利用仿真软件对系统进行了仿真分析。仿真中主要模块的性能参数作如下设置:激光器的中心波长为1 550 nm,光滤波器的带宽均设置为5 GHz;选择了5 GHz、20 GHz、40 GHz 三个频点分别进行仿真,在两路微波信号的相位差为30°时该系统输出的电信号如图3 所示。
从图3 可以看出,在同样的30°的相位差下,5 GHz、20 GHz、40 GHz 三个不同的微波信号,经过上述测向系统后其输出信号幅度是完全一致的。同样系统也仿真分析了φ 分别为0°、60°、90°情况下,输入不同频点下的信号,系统的输出信号同样也是完全一致,仿真输出结果表明在输入的两路信号相位差不变的情况下,其输出信号的大小与频率无关,说明系统具备超宽带的工作性能,这与理论分析结果一致。
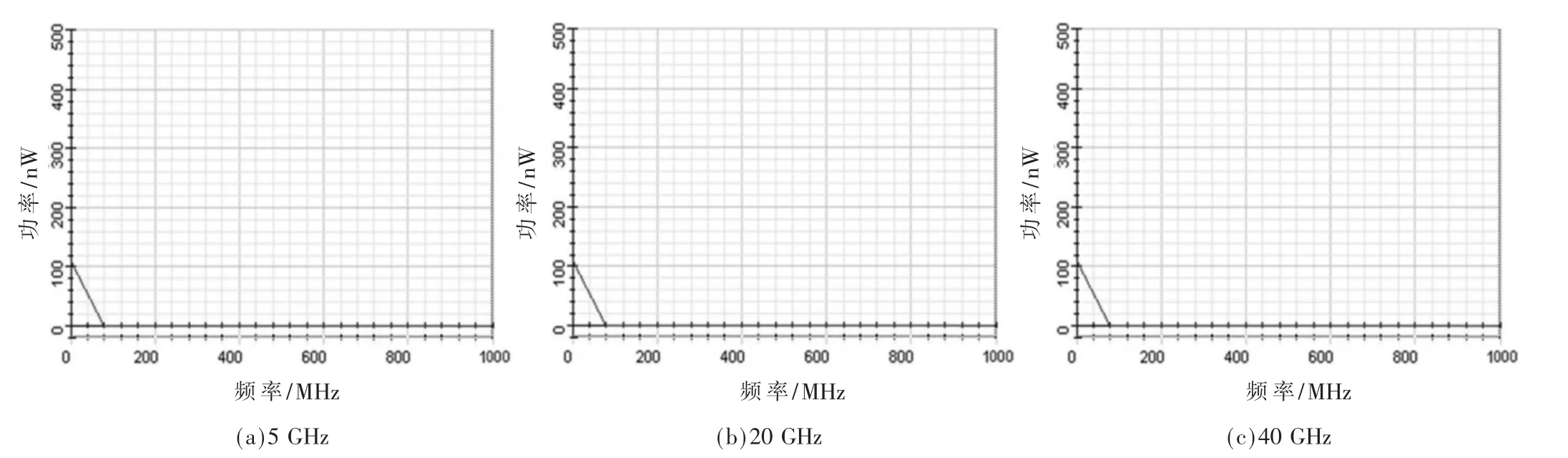
图3 5 GHz、20 GHz、40 GHz 下平衡探测器的信号
进一步仿真分析了在相位差不同时系统的输出信号的变化。仿真过程中选取20 GHz 为工作频点,由于上述已经验证了输出信号与频率无关,选取任意工作频点进行分析对结果没有影响。对应天线阵面两个天线单元的相位差,在仿真软件中设置进入双平行马赫曾德干涉仪的两路射频信号的相位差为0°、30°、60°和90°时,得到系统的输出结果如图4 所示。
从图4 可以看出,在两路输入信号的相位差为0°、30°、60°、90°等不同的情况下的,系统仿真后输出信号功率随着相位差的变化而变化。对其进行归一化处理和拟合后,可得到在不同的微波信号的相位差与输出信号功率的关系,在进行系统搭建和实验测试后,将仿真、实验结果与理论分析的结果进行对比,其结果如图5 所示。

图4 不同相位差下平衡探测器的信号
图5 中方块代表仿真结果,圆点表示实测结果,曲线表示理论值,从图中可以清晰地看出仿真结果与理论分析十分一致。在±90°的相位差范围内,比较得到实测结果的相位误差为±2°。

图5 归一化的探测器输出与相位差的关系图
3 结论
本文提出并理论仿真了一种基于双平行马赫曾德调制器的微波光子测向系统,借助相位干涉仪测向原理,利用光学方法实现对射频信号相位差测量进而可以得到来波方向角,仿真和实验结果表明在5~40 GHz 频率范围内,该系统可以实现-90°~90°的相位差测量,测量相位误差在±2°以内,具有超宽带、抗电磁干扰、结构紧凑简单等优势,适合在未来电子侦察系统中应用。
猜你喜欢
英语文摘(2022年12期)2022-12-30
导航定位学报(2021年3期)2021-06-19
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
小哥白尼(军事科学)(2019年10期)2020-01-18
小哥白尼(军事科学)(2019年6期)2019-10-14
电子制作(2019年15期)2019-08-27
电子制作(2019年12期)2019-07-16
百科知识(2017年3期)2017-03-17
空间控制技术与应用(2015年4期)2015-06-05
时代青年(上半月)(2014年8期)2014-09-03