
机器人的视觉辅助定位与激光SLAM导航设计
2022-09-28 07:58刘晓铭黄国方
粘接 2022年9期
张 静,刘晓铭,黄国方,单 超
(1.南瑞集团(国网电力科学研究院)有限公司,江苏 南京 211106; 2.国电南瑞科技股份有限公司,江苏 南京 211106)
在电力行业的不断发展下,变电站巡检机器人被广泛地应用于发电、变电、配电等各个环节,逐渐取代了人工操作模式和人工巡检模式,极大地提高了电力管理的可靠性和安全性。导航作为电力机器人的重要功能,极大地提高了机器人的智能化移动性能。为此,现将视觉辅助定位与所设计好的激光SLAM导航功能进行充分结合,对电力机器人以下2种参数进行科学校准,如机器人位置、机器人视觉角度,从而获得比较精确的预置位图像,使得机器人的定位精确度达到1 cm。
1 问题简介
以“某实验室配电变压器安全巡检”为例,在实际试验作业期间,电力机器人可以独立自主地导航到指定的预设位置。为了提高电力机器人运行的安全性和可靠性,需要对其运行安全隐患进行实时、有效地分析、识别和预警。电力机器人巡检要点如表1所示。
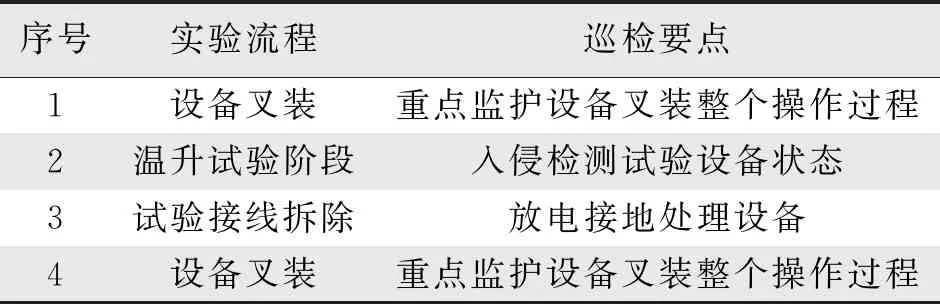
表1 电力机器人巡检要点
在进行巡检操作期间,电力机器人首先要利用自身的自主导航功能,精确地导航到所设置好的最优位置,只有这样,才能最大限度地提高图像拍摄水平以及识别结果的精确性。在温升试验阶段中,为了进一步提高整个巡检操作的规范性,技术人员要根据如图1所示的温升试验阶段巡检监视图像,对围栏区域进行定位和拍摄,从而全面地分析和研究巡检图像相关信息。在这个过程中,避免其他闲杂人员随意地闯入到实验室内,确保设备接线空间位置始终保持稳定不变的状态。此外,还要对冒烟等各种异常情况进行预警,确保异常问题在第一时间内被快速地发现和解决。一旦机器人在实际运行期间,出现定位不精确问题,那么将会导致所拍摄的视频图像存在残缺、偏差误差较大等问题,不利于后期巡检任务的有效执行。
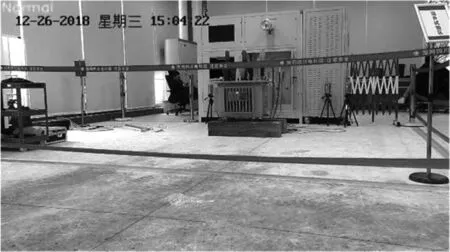
图1 温升试验阶段巡检监视图像
2 机器人自主导航设计
现阶段,电力配电变电站在对机器人进行巡检期间,经常采用的导航方式是激光SLAM导航法。该导航法将激光传感器定位法与地图构建定位法进行充分结合,现以“激光SLAM导航设计”为例,完成对电力机器人自主导航功能的科学设计。激光SLAM导航在具体的设计期间,为了确保机器人导航的自动性和精确性,技术人员需要做好对以下2类信息的实时化获取和整理:一类是障碍物尺寸信息以及其位置信息;另一类是机器人的目标位置信息。在空间较大的实验室场景下,电力机器人首先要做好对周围环境信息的实时化、精确化感知和获取,从而精确地检测和识别出障碍物的当前位置,并对这些障碍物进行躲避处理,以达到避开障碍物的目的。另外,电力机器人在避障期间,需要根据所获取的目标位置信息,尽可能地拓展传感器视野范围,确保电力机器人在进行避障期间,能够根据目标点和障碍物的所在位置,顺利、安全地达到目的地。
2.1 双单目视觉功能设计
为实现这一目标,设计一种双单目视觉相结合的方式,完成对以下2种功能的设计,从而实现对电力作业现场环境相关信息的精确化获取和整理。(1)双目视觉功能。该功能在具体的设计中,需要将双目相机水平放置于电力机器人平台上,从而实现对以下几类信息的精确化、实时化获取和整理,如机器人四周环境信息、障碍物尺寸信息以及其位置信息、机器人行驶路面信息;(2)单目视觉功能。该功能在实际设计期间,广角摄像头主要水平放置于电力机器人工作面上,对目标信息以及机器人四周环境信息的精确化获取和整理,并在充分利用这些信息的基础上,可以实现对目标所在位置以及电力机器人所在位置的精确化识别和定位,为后期更好地跟踪和定位目标信息创造良好的条件。
2.2 地图构建
通过利用双目视觉功能,可以对电力机器人周边环境信息的精确化检测和获取,同时,将这些信息与障碍物尺寸信息和位置信息进行有效地结合,从而构建出符合实际应用需求的地图。在实验室中,利用电力机器人对目标位置进行识别和定位,通过坐标转化,将两者信息有机融合,可以获取全局环境下障碍物、目标和机器人空间位置、尺寸信息,构建出全局地图,为机器人路径规划提供必要的信息。由此可见,地图构建具有重要意义,不仅可以保证电力机器人自主导航功能实现效果,还能帮助电力机器人更好地规避障碍物,保证其定位的精确度。
3 视觉辅助定位方法
3.1 激光SLAM导航与视觉辅助定位融合
根据所设计好的机器人架构,将视觉辅助定位与激光SLAM进行充分结合,从而形成一种综合方案,并绘制出如图2所示的视觉辅助定位与激光SLAM导航融合流程图。
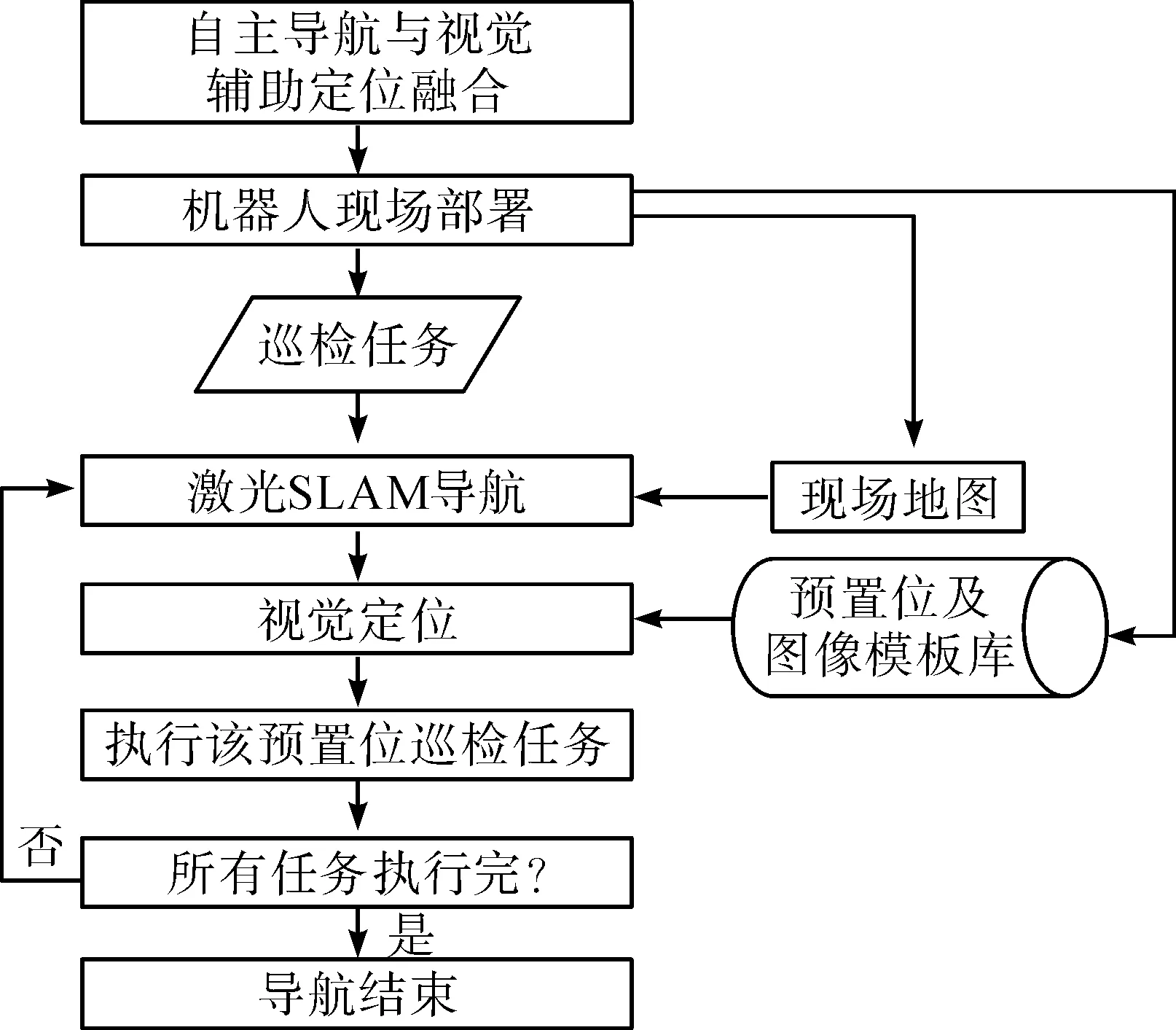
图2 激光SLAM导航与视觉辅助定位
在进行部署环节中,电力机器人通过对地图进行科学构建,从而实现对传感器的激光化扫描,确保地图安全、可靠地存储于到机器数据库中。此外,根据所要完成的巡视任务,将机器人相关的预置图像模板与停靠定位相关信息安全、可靠地存储于的数据库中。此外,还要充分结合巡检任务实际接收情况,对电力机器人进行激光SLAM导航操作,此时,电力机器人可以利用所获取的信息,运用概率学相关统计知识,对地图中的相关位置进行一一匹配,从而确定出最佳导航路径,促进巡检操作向高效化、智能化方向不断发展,同时,还要加大对电子陀螺仪的应用力度,对电力机器人当前调控操作姿态进行科学化定位、辅助,从而最大限度地提高机器人的激光SLAM导航水平。当电力机器人完成精确化定位操作后,需要运用可见光摄像机,根据预置位设置情况,将巡检任务落实到位,并将这些任务依次导航到其他各种位置,然后,对最终的执行情况进行再次校准,确保所有巡检任务执行到位,此时,表明导航结束。由此可见,与单一激光SLAM导航方式相比,通过采用视觉辅助定位与激光SLAM导航结合法,可以在部署环节,完成对各种图像模板库的创建。因此,在进行巡检期间,将视觉辅助定位与激光SLAM导航进行充分结合显得尤为重要。
3.2 基于视觉图像的定位校准
电力机器人在执行任务初期,需要尽可能提高导航的精确度。同时,为了避免机器人出现较大误差,违背定位相关要求,根据视觉图像特点,提出一套行之有效的定位校准算法,从而将机器人的定位误差降到最低。基于视觉图像的定位校准流程如图3所示。

图3 基于视觉图像的定位校准流程
从图3可以看出,电力机器人在实际读取期间,需在所设置好的位置处,完成对视频图像的精确化采集和整理,并对图像轮廓进行精确化提取和定位。然后,与所保存的图像模板进行全面地分析和对比,且利用哈希图像匹配算法,对2幅不同的图像之间的异同点进行分析和判断。为进一步提高电力机器人位置偏差计算结果的精确度,技术人员要做好对图像像素与实际距离之间比例的精确化计算和统计,并构建出相应的摄像机成像模型,从而表现出实际坐标值与图像像素坐标值。另外,还要利用机器人摄像机,对所需要的预置位图像模板进行拍摄和整理,然后,精确地测量机器人与目标物体之间的距离。结合上文所获得的图像轮廓信息,对当前图像实际坐标值进行精确计算,这为后期统计电力机器人的位置偏差提供重要的依据和参考。如果定位处理后的机器人不能满足所允许的最大误差范围,需要对其重新定位操作,直至满足为止。
4 视觉辅助定位方法的应用
4.1 应用环境及测试方法
为了更好地验证本文所提方案的可靠性和有效性,现搭建出如图4所示的实验室应用图。然后,对所配置的变压器使用情况进行导航和定位测试。图4中的左下角是机器人,由于该实验处于准备阶段,因此,图4中存在叉车搬运、人员进入围栏等区域,一旦机器人在实际定位和导航期间,出现精确度较低问题,将会增加误碰撞的风险,从而降低了最终巡视结果的精确度。为此,通过利用激光SLAM相关技术,构建出相应的实验室地图,应用环境的测试方法为:首先,根据所配置好的机器人,开展相应的预置点位;然后,采用激光SLAM导航的方式,确保电力机器人自动行驶到指定的预置点。

图4 实验室应用
此外,还要对电力机器人相关参数误差进行全方位测量,其参数误差主要包含定位误差、角度误差;另外,还要将表2所示的5个设定点位分别配置于相应的实验室内,在此基础上,通过选用合适的激光SLAM定位模式,根据所设置好的5个点,开展5次定位工作,经过定位处理发现电力机器人所允许的最大定位误差较低,始终低于5 cm。
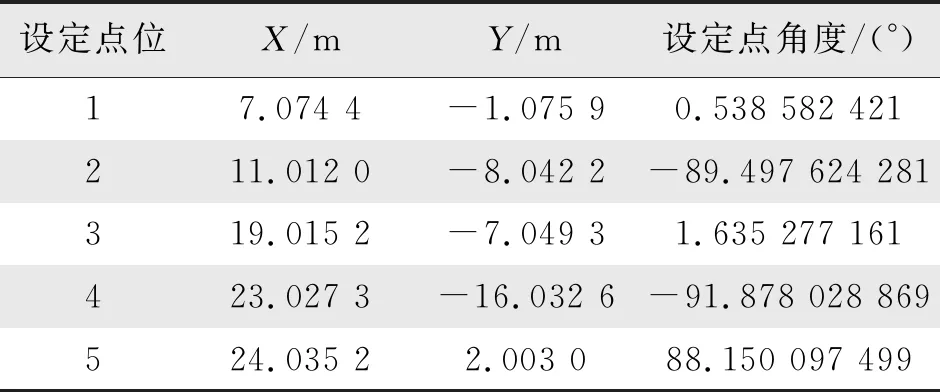
表2 实验室现场配置点位
4.2 视觉辅助定位精度试验
通过利用本文所提出的定位方案,开展第1组定位试验,然后,对最终的定位误差进行记录和统计,得出如表3所示的第1组定位误差统计结果。

表3 第1组定位误差
从表3可以看出,当偏差和偏差所对应的的最大值分别达到0.50、0.17 cm时,其最大定位误差为0.50,最大角度偏差为0.92°。同样,按照以上操作方式,对机器人进行多组定位测量,得到如表4所示的第2组至第5组定位误差结果。
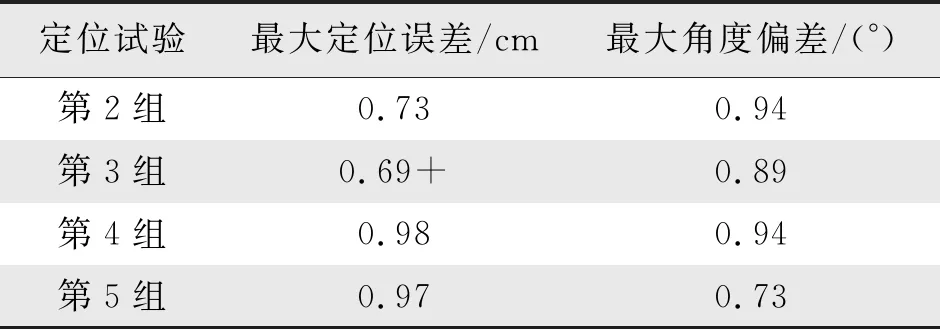
表4 第2组第5组定位误差
然后,根据所确定好的某一点位置,将定位测量次数设置为20次,然后,精确地计算和统计机器人相关参数,如机器人定位误差参数、机器人角度误差参数,从而得出如表5所示的同一定位点测量结果。
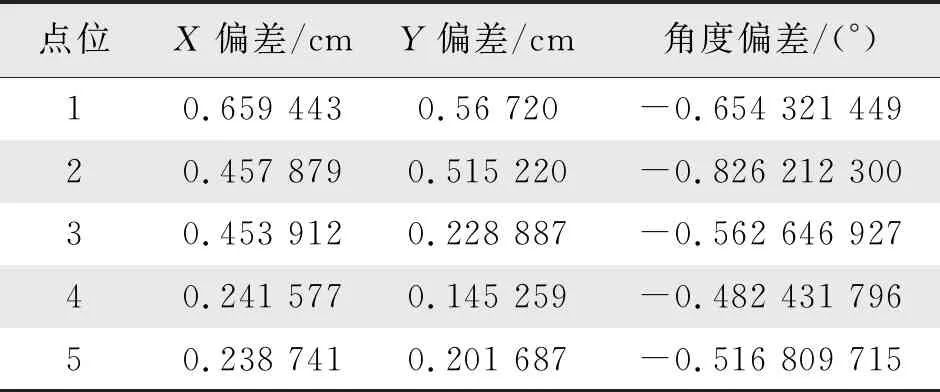
表5 同一定位点测量
从表5中的数据可以看出,最大定位误差为第1次的译码器偏差为0.56 cm。
由此可见,通过全面分析以上表格数据,不难发现,本文所提出的视觉辅助定位与激光SLAM导航融合方法在实际运用中,可以获得定位精确度低于±1 cm,定位角度低于正负1°,极大地提高了电力机器人的定位精确度。因此,经过现场应用实践,不难发现,该方法完全符合电力机器人巡检标准和要求,为促进配电变压器检测工作的有效开展打下坚实的基础。
5 结语
综上所述,在电力行业的不断发展下,电力作业环境变得异常复杂,为了进一步 提高机器人的定位精确度,实现对机器人的精确化、智能化控制,本文提出了一套切实可行的视觉辅助定位与激光SLAM导航设计方案,通过利用激光SLAM导航功能,帮助机器人随时随地地采集和整理图像,并将整理好的图像与预置位图像模板进行全面地分析和对比,从而获得相应的定位误差,确保机器人能够智能化地完成定位校准工作。实验结果表明:通过将激光SLAM导航功能与视觉辅助定位方法进行充分结合,可以确保机器人的定位精确度得以大幅度提升。但是,本次研究仍然存在一定的不足,没有根据视觉图像最终识别结果,在充分结合动态环境特点的前提下,确保电力机器人精确、有效地判别和避开各种障碍物,从而提高其导航性能,因此,技术人员 要再接再厉,通过学习更多的专业知识,解决论文中存在的不足问题。
猜你喜欢
工业设计(2022年9期)2022-10-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学数学杂志(初中版)(2017年4期)2017-08-28
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
儿童故事画报·智力大王(2016年3期)2016-05-05
海峡科学(2013年3期)2013-10-21
数学大世界·小学低年级辅导版(2010年4期)2010-03-25
小哥白尼·军事科学画报(2009年6期)2009-02-03
