一种动对动相对定位中平滑惯导辅助模糊度解算策略
2022-09-29 13:32吴玲孙永荣付希禹
科学技术与工程 2022年23期
吴玲, 孙永荣, 付希禹
(1. 南京航空航天大学导航研究中心, 南京 210016; 2. 南京航空航天大学金城学院机电工程与自动化学院, 南京 211156)
传统动态相对定位可以达到厘米级的精度,但是受限于基准站位置固定,覆盖范围有限等问题。如飞机编队飞行、空中加油、海上船舰相对定位等情况下,移动载体离固定基准站距离较远,难以使用传统相对定位的方法。为了克服以上问题,采用动态对动态相对定位的方法,以此来获得高精度的相对定位结果[1-3]。其中,基于载波相位差分定位技术的关键之一就是整周模糊度的可靠解算。模糊度解算的速度与质量直接影响定位的精度。但是,在动态过程中,卫星信号易受外界环境干扰,从而导致观测数据完好性与连续性的不足。此外,采用单点定位方法获得的测站近似坐标也会使得初始模糊度浮点解精度变低。
惯导具有短时精度高、自主性强等特点,能够在卫星信号发生遮挡或者信号质量较低时维持短时高精度状态输出。因此,全球导航卫星系统(global navigation satellite system,GNSS)和信息网络系统(information network system,INS)系统具有优势互补的特点,而DGNSS/INS紧组合系统具有在可视卫星不足条件下仍能够提供导航定位的优点,可以有效地提升导航定位系统的性能[4-5]。基于载波相位观测量的高精度DGNSS/INS紧组合定位中,动态模糊度的可靠固定是核心问题,一直受到众多学者的关注。在DGNSS/INS组合导航系统中,惯性先验信息的合理利用能有效辅助GNSS高精度定位。文献[6]研究了INS/GPS深组合方式下INS辅助的全球定位系统(global positioning system,GPS)相对定位算法,采用半物理仿真对算法进行了验证,达到了毫米级的定位精度。文献[7]针对高动态应用,提出了一种利用加速度信息辅助Kalman滤波模型的实时动态(real-time kinematic,RTK)整周模糊度浮点解求解方法,并通过仿真对算法的动态性能进行了深入分析。文献[8]研究了基于INS辅助的双频GPS/BDS/INS紧组合滤波算法,评估了BDS/INS紧组合的效果。文献[9]提出了采用两个运动载体上的惯导信息构造伪距双差并与载波相位双差组合进行惯性辅助动对动模糊度解算,提高了模糊度浮点解精度,缩短模糊度固定时间。文献[10]分析了GPS信号短时间失锁情况下利用INS辅助信息可瞬时恢复整周模糊度。文献[11]提出了一种BDS/INS紧组合三频动对动模糊度解算方法,采用紧组合输出高精度位置估算双差几何距离,显著降低了伪距双差噪声水平,提高了模糊度固定成功率。
针对基于载波相位的GNSS单频实时定位中动态模糊度浮点精度不高,固定效率低的问题,提出一种新的惯性辅助GNSS动对动模糊度快速解算方法,以DGNSS/MEMS INS紧组合输出惯性信息经卡尔曼滤波平滑处理,进一步提高惯性导航位置精度,再利用高精度惯性位置坐标组成双差几何距离,并构造辅助虚拟观测量,重构观测方程,提高了模糊度解算模型强度,提高了模糊度固定效率。
1 惯性辅助模糊度解算策略
1.1 动态对动态差分定位算法
传统的动态相对定位中,以流动站坐标为参数进行线性化,未知参数是流动站坐标的改正量,这种线性化的方法的前提是参考站坐标精确已知。而在动对动相对定位中,并没有精确位置已知的基准站位置,因此需选取其中一个测站作为移动基准站,采用以基线改正数作为未知参数,可构成基于移动基准站的相对定位模型[12]。短基线条件下,为了大幅度消除观测值之间的空间相关误差,以及卫星钟差、接收机钟差、电离层延迟误差和对流层延迟误差,采用伪距及载波相位构成的双差组合线性化观测方程为

(1)

设某一历元时刻,观测到可见卫星数为n颗,将式(1)表示为矩阵误差方程为
L=AX+V
(2)
在实际观测中,为了更能真实反映观测值质量,选取基于高度角的随机模型,具体形式为

(3)
(4)
由此,双差观测值权阵可表示为
(5)
由加权最小二乘法解算可得未知参数估值为
(6)
以及方差-协方差矩阵为
(7)
然后再利用LAMBDA方法固定整周模糊度,并获得固定解下的位置及其方差协方差矩阵为

(8)
1.2 惯性辅助整周模糊度求解算法
利用惯导系统短时高精度的输出位置来辅助动态情况下模糊度解算,可以有效提升模糊度浮点解精度,减小模糊度搜索空间,提高模糊度固定的成功率。
采用惯性导航输出位置计算预测卫地距,即

(9)
式(9)中:(xs,ys,zs)为卫星位置;(xins,yins,zins)为惯性导航输出位置,并惯性位置代替移动站r近似位置重构观测方程(1),同时增加惯性位置虚拟观测方程构建辅助约束,可得组合系统模糊度解算方程[13]为

(10)
式(10)中:Xins、X0分别为移动站r惯导输出位置和真实位置;在INS预测位置进行线性化时,为0向量,εins为INS系统观测噪声,由组合滤波先验方程获得。
由加权最小二乘解算加入惯导位置辅助后,模糊度浮点解方差为

(11)
未加入惯导位置辅助时,模糊度浮点解方差为

(12)
式(12)中:P为观测值权阵。综合比较式(11)和式(12),可得

(13)
由式(13)可知,加入惯导信息辅助后可减小模糊度浮点解方差协方差阵,有利于提高浮点解精度。
1.3 惯性导航卡尔曼滤波器设计
由式(10)可知,INS预测位置精度影响INS辅助模糊度解算的可靠性,为了进一步提高惯性导航预测位置精度,采用对惯性导航输出信息进行Kalman滤波平滑处理,选取移动站r在ECEF系下的三维位置、速度、加速度为状态量,其中加速度采用一阶马尔科夫过程建模为
(14)
式(14)中:τa为加速度时间相关常数,取值2 s;wa为白噪声。
以惯导输出位置、速度及加速度为量测信息,构建惯导卡尔曼滤波器来对惯导信息进行平滑。设离散化后的状态方程与量测方程为

(15)
式(15)中:X与量测信息Z分别为
(16)
状态矩阵F为其中T为滤波周期,即

(17)
式(17)中:T为滤波周期。
Kalman 滤波器可分为状态预测和量测更新,分别设计如下。
(1)状态预测方程为

(18)
(2)量测信息更新方程为
(19)

2 DGNSS/INS紧组合定位模型
DGNSS/INS组合导航系统常采用扩展卡尔曼滤波(extended Kalman filter, EKF)进行系统融合,系统的动力学模型由INS系统导出,观测模型由DGNSS伪距、载波相位双差观测值与INS预测观测量差值构成。
2.1 系统模型
系统状态空间模型依赖于INS误差模型以及惯性传感器系统误差的描述,采用基于psi角的INS误差方程,不考虑卫星系统误差量,本文中所采用的系统状态模型[14]为
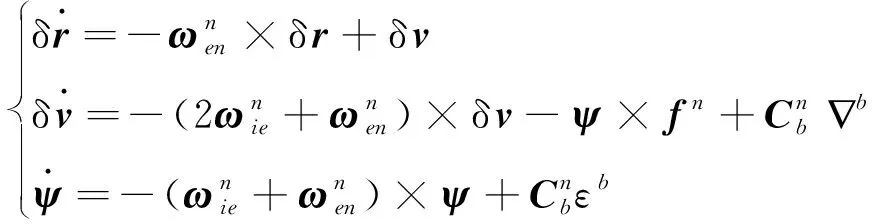
(20)
系统状态方程表示为

(21)
式(21)中:X为状态变量;F为状态系数矩阵;W为误差向量;G为误差系数矩阵。
2.2 观测模型
Z(t)=H(t)X(t)+V(t)
(22)
式(22)中:Z为观测向量;H为观测模型系数矩阵;V为观测噪声矩阵。基于DGNSS/INS紧组合的惯性辅助模糊度解算算法流程如图1所示。

图1 惯性辅助模糊度解算算法流程Fig.1 The algorithm flow of INS aided ambiguity resolution
3 实验验证
3.1 实验数据采集
本实验采用2台Novatel OEM-615板卡授时导航接收机采集GPS广播星历及伪距、载波相位观测数据,接收机采样频率为1 Hz。惯导数据使用荷兰Xsens公司的MTI-G-700惯性位置追踪器采集,标称的陀螺仪偏置稳定性为10 (°)/h,加速度计精度为40 μg,采样频率为100 Hz。实验于2021年3月25日,在南京航空航天大学将军路校区自动化学院天台进行,将设备放置于两辆小推车上,流动站上惯导中心与卫星天线相位中心偏差采用测距仪进行测量补偿,两移动测站同时绕圈运动。实验场景及运动轨迹如图2所示。

图2 两测站运动轨迹图Fig.2 Moving trajectory of two stations
3.2 实验验证
通过实际采集到的数据,针对GPS L1单频信号采用动对动差分定位算法,分别在无惯导辅助、有惯导辅助及平滑惯导辅助三种情况下进行了模糊度解算分析,模糊度检验Ratio取值为3。采用RTKLIB解算得到数据采集期间各颗卫星相对参考星的双差模糊度参考值如表1所示。卫星截止高度角设为15°,参考星取观测历元期间卫星高度角保持较高的共视卫星,编号为prn=21,本次实验采集的卫星天顶分布图如图3所示。
无惯导辅助情况下,采用加权最小二乘动对动差分定位算法解算得到的整周模糊度如图4所示。
通过对图4分析可知,以上9组双差整周模糊度在整体情况下均基本得到固定,主要因为本次数据采集在实验楼顶天台进行,卫星数据观测质量较好,但还是会出现部分模糊度未固定的情况。尤其在初始阶段模糊度会产生持续的波动,无法快速固定模糊度。

表1 双差整周模糊度Table 1 Double difference integer ambiguity
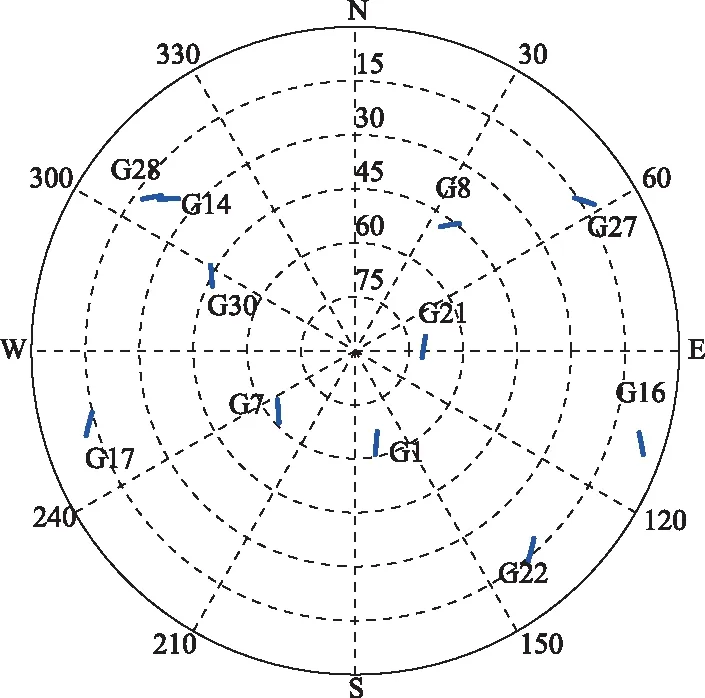
图3 可视卫星天顶分布图Fig.3 The sky plot of visible satellite

图4 无惯导辅助的双差整周模糊度固定情况Fig.4 Integer ambiguity resolution without inertial navigation
使用惯导信息辅助双差整周模糊度固定情况,如图5所示。
对比图5与图4无惯导辅助的双差模糊度解算情况,可以看出,引入惯导短时高精度位置信息重构观测方程后,双差模糊度解算整体情况得到较大改善,初始模糊度固定值大幅增加,有效提高了模糊度固定的成功率,初始模糊度的波动情况得到明显改善。
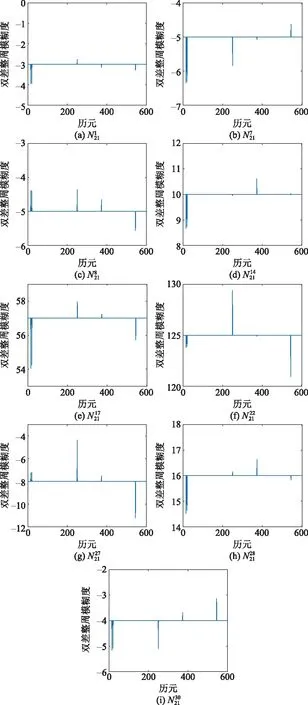
图5 惯导辅助的双差整周模糊度固定情况Fig.5 Integer ambiguity resolution with inertial navigation
为减少INS测量噪声对模糊度解算的影响,利用卡尔曼滤波对惯性导航数据进行平滑处理。惯性导航位置及速度经卡尔曼滤波平滑后的效果分别如图6、图7所示。
由6和图7可见,经卡尔曼滤波平滑后的惯性导航位置及速度信息有一定的提高,有利于预测更加准确的卫地距以及惯性虚拟观测量。
采用经卡尔曼滤波平滑后的惯导信息辅助双差整周模糊度的固定情况,如图8所示。
从图8可以看出,经过平滑惯导辅助的模糊度解算情况得到进一步改善,整个观测历元内模糊度都能基本保持固定解,表明了本文所提方法的有效性及可靠性。通过惯导位置信息提升了定位模型的准确性,改善了模糊度固定情况。

图6 惯性导航输出位置滤波前后对比图Fig.6 Inertial navigation output position comparison before and after filtering

图7 惯性导航输出速度滤波前后对比Fig.7 Inertial navigation output velocity comparison before and after filtering
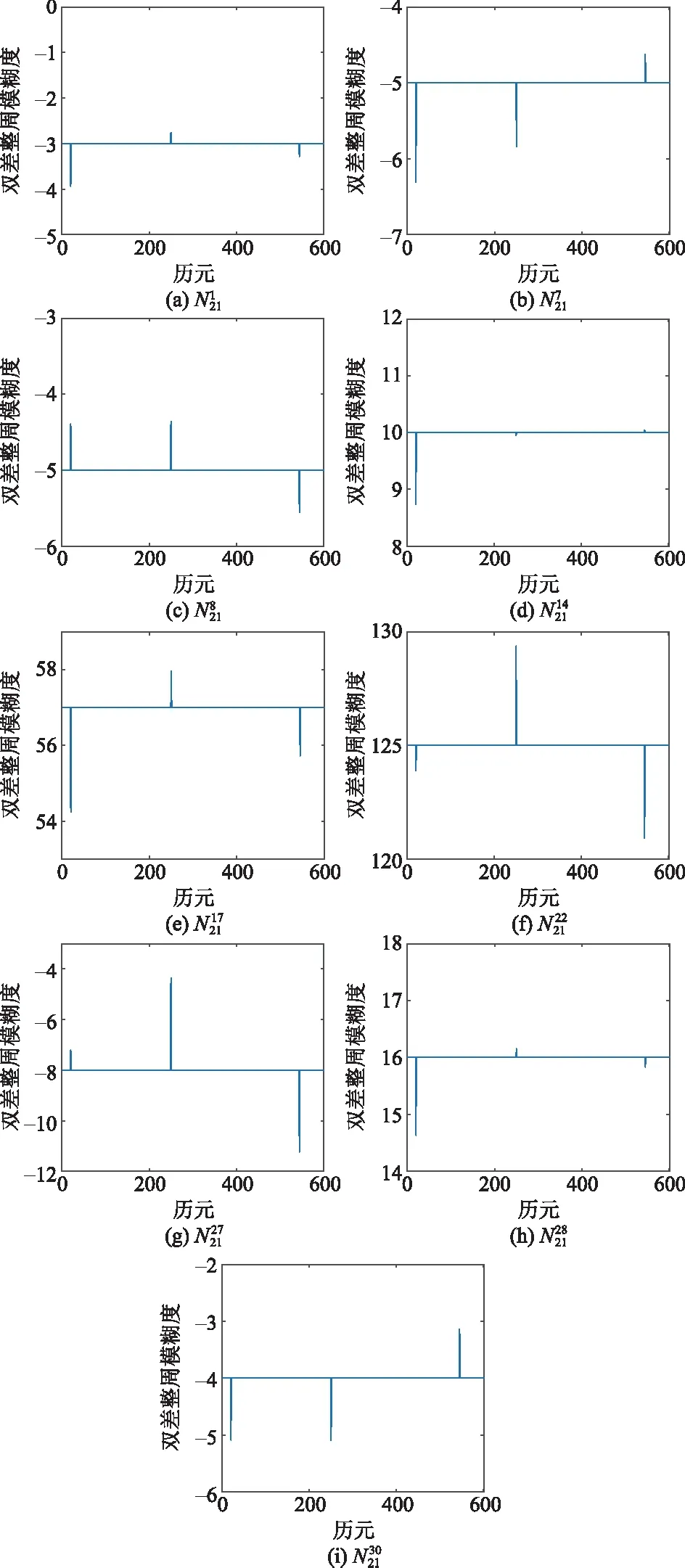
图8 平滑惯导辅助的双差整周模糊度固定情况Fig.8 Integer ambiguity resolution with inertial navigation with Kalman filter
通过统计对比三种方法下模糊度固定成功率,传统方法解算观测时刻内的双差整周模糊度的固定成功率大约92.3%;而经过惯导辅助后再进行相应的双差模糊度解算,其固定成功率大约在99.1%,相较于前者提升了近6.8%;对惯导数据加卡尔曼滤波进行平滑后,再进行模糊度解算的固定成功率在99.6%,进一步提升了近0.5%。

由图9分析得到,惯导辅助的模糊度解算算法和平滑惯导辅助的模糊度解算算法对模糊度解算效果均有着较为明显的改善。尤其对于初始阶段的模糊度以及发生周跳后的模糊度重新固定问题,均可实现快速、准确的固定,大大提升了模糊度解算的效率与可靠性。
以Novatel OEM-615板卡授时导航接收机RTK模式的测量结果作为参考标准,得到三种方法下的基线定位误差如图10所示。由图10可知,三种情况下动态对动态差分定位基线误差均值分别为0.010 8、0.005 2、0.004 5 m,在模糊度固定情况下,可达到厘米级高精度相对定位结果。

图9 双差整周模糊度固定情况对比Fig.9 Double-difference fixed ambiguity comparison

图10 动对动差分定位基线误差对比Fig.10 Differential positioning accuracy
4 结论
针对传统高精度动态相对定位受限于固定基准站精确位置,以及低成本接收机动态模糊度解算成功率低的问题,提出了一种基于移动基准站的平滑惯导信息辅助单频整周模糊度动态快速解算方法,并通过实测数据验证算法有效性,得到如下结论。
(1)惯导信息辅助有利于缩小模糊度搜索空间,提高模糊度浮点解精度,从而提高模糊度固定成功率,与无惯导信息辅助相比,模糊度固定成功率提高了6.8%。
(2)模糊度固定成功率与惯性预测精度有关,经平滑后的惯导信息有利于进一步提高模糊度固定成功率,与普通惯导信息辅助相比,模糊度成功率进一步提高了0.5%。
(3)平滑惯导信息辅助的单频动对动相对定位可获得厘米级定位精度,提高了低成本接收机相对定位的普适性。
猜你喜欢
天天爱科学(2022年9期)2022-09-15
北京航空航天大学学报(2022年8期)2022-08-31
物联网技术(2022年7期)2022-07-21
当代水产(2022年6期)2022-06-29
中国药学药品知识仓库(2022年10期)2022-05-29
中国典型病例大全(2022年9期)2022-04-19
北京航空航天大学学报(2021年7期)2021-08-13
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
中学生数理化·八年级物理人教版(2014年1期)2015-01-09