海上油田专用机械臂结构设计与控制仿真
2022-10-09 11:18石鹏
中国新技术新产品 2022年13期
石 鹏
(中海油能源发展股份有限公司采油服务分公司,天津 300452)
0 引言
近年来,随着海底石油探明储量的不断增加,海上油田进入了快速建设和高速发展阶段。对海上油田的石油开采及其他作业,工业机器人更是完成作业、提升效率的关键。但因为海上油田和陆地油田存在较大的差异,石油开采及其他作业的完成也有别于陆地油田,这就使已经研发成功并且使用广泛的陆地油田工业机器人、自动化机械臂无法直接应用于海上油田。为此,该文针对海上油田的技术要求,提出一种专用机械臂的结构设计方案,并通过仿真试验验证其控制效果。
1 海上油田专用机械臂的结构设计
1.1 专用机械臂的设计需求
石油开采的过程是原油抽取的过程,随着原油的不断抽取,油田储油区域会出现地下中空层。这不仅会导致塌陷的危险,还会因为压力不足导致后续原有抽取的困难。因此,石油开采的过程都随着注水作业,以填充原油抽取后的中空区域。这一点对海上油田同样适用。但是受到物力性质和化学性质的制约,海上油田抽油后中空区域不能直接用海水填充,仍需用淡水填充。所以,在一定的作业周期内会有轮渡船承载水罐车到达油田作业平台,提供填充所需的淡水。
水罐车自身具有特定的车身高度,同时出水口设置在罐车上方,需要机械臂末端对准上方出水口才能完成抽水作业。从抽水作业过程来看,该文的专用机械臂需要利用液压传动的方式,在液压马达提供的动力下,通过链式传动将机械臂末端送到水罐车出水口上方15 cm左右的位置。这一前期准备工作之所以保持15 cm的距离,是因为要确保机械臂与水罐车车体不发生直接碰撞。当抽水作业开始后,机械臂末端应能将抽水导管下放到水罐车页面下45 cm左右的位置,以确保有效抽水。
抽水作业的特定要求也直接影响了专用机械臂各关节、各主要部件的动作范围,这也直接形成了对专用机械臂参数设计需求,见表1。
1.2 专用机械臂的结构设计
根据表1给出的海上油田专用机械臂的运动功能主要部件和参数需求,该文给出大致的设计简图,如图1所示。
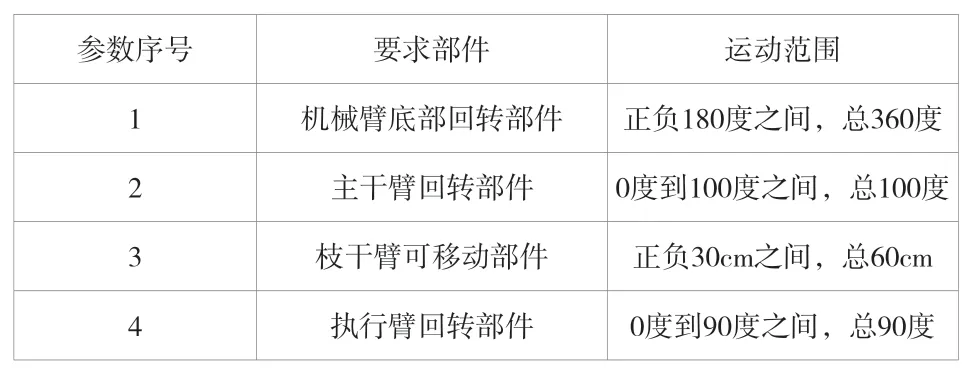
表1 专业机械臂设计参数需求
从图1可以看出,为了满足设计需求,该文给出了底部回转部件、支架、主干臂、枝干臂和执行臂等部件,支架、主干臂、枝干臂和执行臂4个部件之间的连接,则通过3个关节实现。
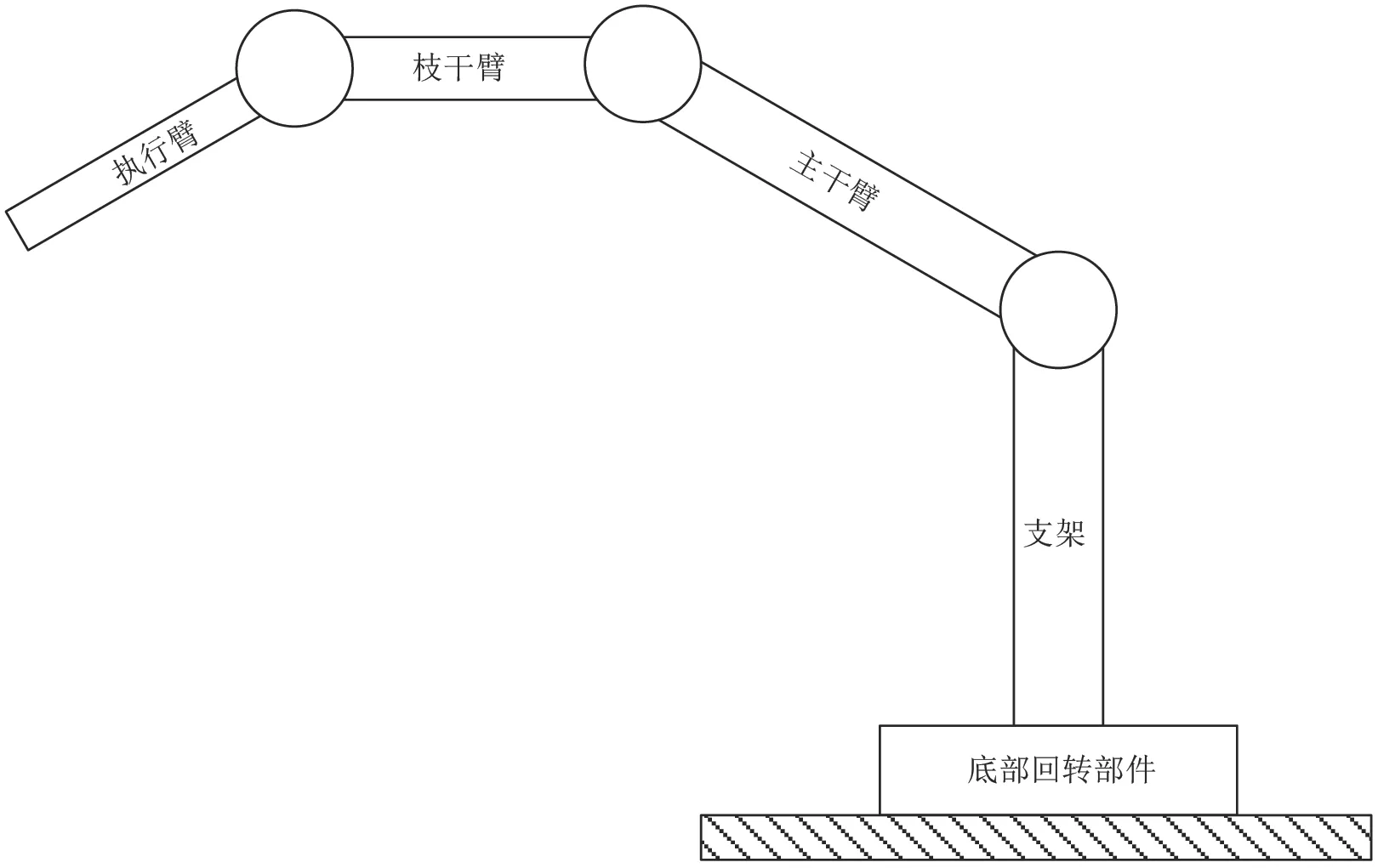
图1 海上油田专业机械臂的设计简图
从图1可以看出,这个机械臂中包括3个臂支、1个支架和1个回转部件。执行臂和枝干臂之间、枝干臂和主干臂之间、主干臂和支架之间都是通过转动关节连接,形成了3个自由度。底部回转部件本身也可以做360度的整周回转,这又是一个自由度。执行臂在操作过程中可以自带一个自由度用于完成抓取、提拉与抽水等动作。这样叠加在一起,海上油田专用机械臂一共包括5个自由度。
考虑服务于该文关联海上油田水罐车的细致参数,车体总宽度2.8 m,车体总高度3.6 m,水罐总深度2.2 m,上方出水口距离车体左、右两侧为1.4 m。再考虑机械臂作业时与车体的安全距离不小于0.5 m,结合功能要求和作业空间要求,最终设计出的主干臂长度为1.5 m,枝干臂长度为1.4 m,执行臂长度为0.5 m。最终设计出的海上油田专用机械臂的三维仿真模型如图2所示。
2 海上油田专用机械臂的运动学分析
根据图2可以得到底部回转部件、支架、主干臂、枝干臂以及执行臂具体的参数,为了验证其是否可以达到正常的作用空间要求,对其进行数学建模和运动学分析。
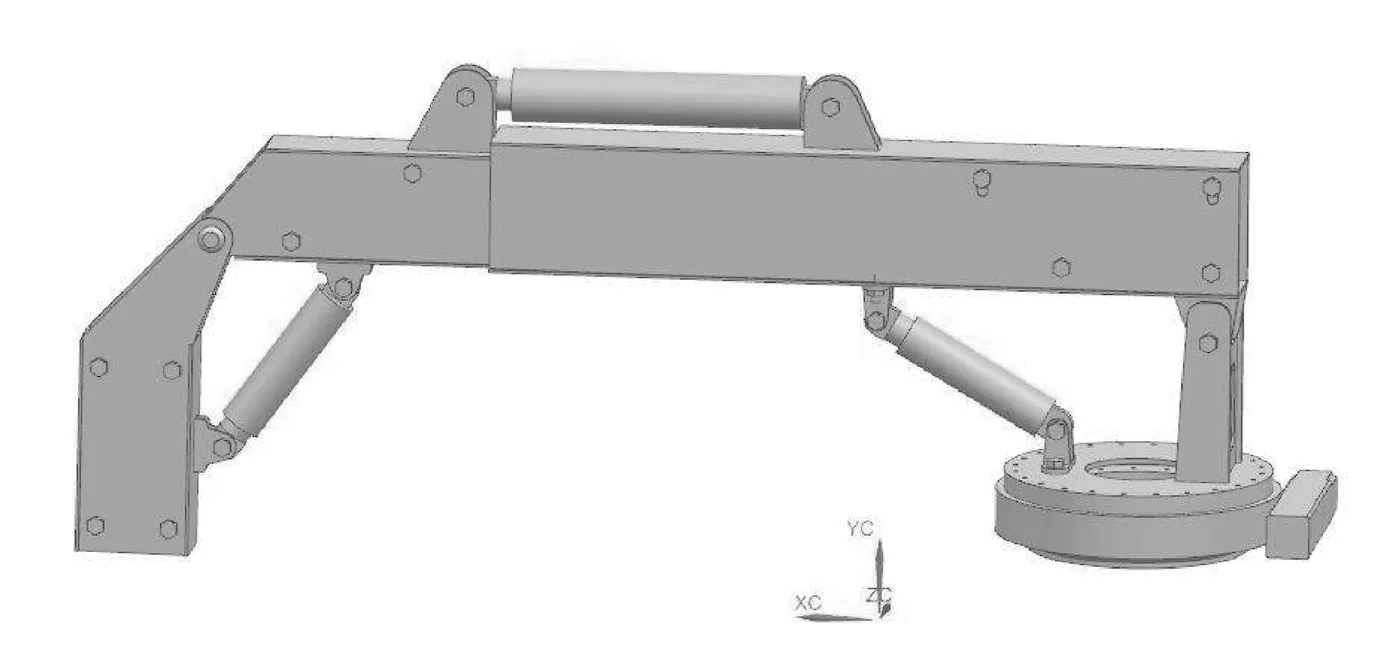
图2 海上油田专用机械臂的三维仿真设计结果
因支架固定于底部回转部件上,因此将二者看成一个整体,综合考虑这样几个参数:底部回转部件连同支架的旋转角度、底部回转部件连同支架的总体质量以及底部回转部件连同支架的总体转动惯量。
对主干臂,考虑这样几个参数:主干臂的旋转角度、主干臂的总体质量和主干臂的总体转动惯量。对枝干臂,考虑这样几个参数:枝干臂的旋转角度、枝干臂的总体质量和枝干臂的总体转动惯量。对执行臂,考虑这样几个参数:执行臂的旋转角度、执行臂的总体质量和执行臂的总体转动惯量。
再考虑:底部回转部件回转中心到主干臂回转中心的距离、主干臂质心到主干臂回转中心的距离、主干臂质心到枝干臂质心的距离、执行臂回转中心到枝干臂质心的距离、执行臂回转中心到执行臂质心的距离以及枝干臂最大的移动距离。
忽略掉机械臂在整个作业时间窗内的能量损失,构建整个机械臂系统的动力学方程,联合表达形式如公式(1)、公式(2)和公式(3)所示。
式中:参数为Lagranger函数;参数为专用机械臂的整体动能;参数为专用机械臂的整体势能;参数θ为第个关节的角位移的大小,其一阶微分形式代表了角速度的大小;参数τ为外加的驱动力矩的大小,即液压马达提供的动力。
进一步可以得到专用机械臂的整体转换矩阵,如公式(4)所示。

进一步的运动学分析解算可以得到关键矩阵的形式,如公式(5)、公式(6)所示。
3 海上油田专用机械臂的控制仿真
在工业机器人控制领域中,Sliding控制算法是一种使用广泛的算法,其特点是可以实现不连续的非线性控制。为了有效抑制Sliding控制算法抖动现象的发生,可以用饱和函数作为原有Sliding控制算法内核控制函数的替代。原有Sliding控制算法中的内核函数,是简单的开关切换函数,所以体现为控制过程的过于刚性化,而饱和函数的使用再配套边界设定和相应处理,可以使控制位置的转换变得相对柔性,进而有效削弱控制过程中可能出现的抖动现象。
为了实现对海上油田专用机械臂的稳定控制,该文构建如下的Sliding控制算法,其理论基础是在获取了使用者所需的运动轨迹或任务点位信息后,断续调整机械臂的速度和方向,虽然是断续控制,但要求机械臂的各个关节角度始终与运动学解算角度保持一致。
在这里,首先定一个误差量用于跟踪控制,其数学形式如公式(7)所示。

基于这个误差量,进一步设计一个Sliding函数,其数学形式如公式(8)所示。

进一步,可以得到Sliding控制规律内核函数,其数学形式如公式(9)所示。

根据上面设计出的控制算法对海上油田专用机械臂进行控制仿真试验,其跟踪位置曲线和预期位置曲线的变化情况如图3所示。图3中,实线代表了专用机械臂末端执行臂预期的位置变化曲线,虚实线代表了专用机械臂末端执行臂在Sliding控制算法下形成的位置跟踪曲线。可以清晰地看出,机械臂末端执行臂的位置非常理想地实现了对预期位置的跟踪。
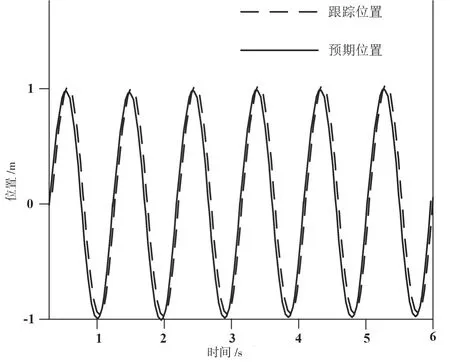
图3 Sliding算法下专用机械臂的位置跟踪曲线
进一步观察跟踪速度曲线和预期速度曲线的变化情况,如图4所示。
图4中,实线代表了专用机械臂末端执行臂预期的速度变化曲线,虚线代表了专用机械臂末端执行臂在Sliding控制算法下形成的速度跟踪曲线。可以清晰地看出,机械臂末端执行臂的速度非常理想地实现了对预期速度的跟踪。
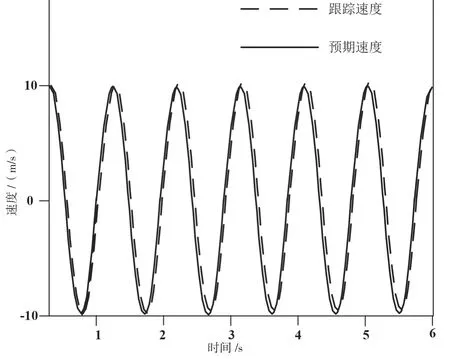
图4 Sliding算法下专用机械臂的速度跟踪曲线
4 结论
根据海上油田作业的实际需求,该文展开了一种专用机械臂的结构设计和控制仿真实验研究工作。首先,根据功能要求设计了专用机械臂的结构简图和三维仿真结构图。在结构设计中,采取了底部回转部件、主干臂、枝干臂和执行臂的结构设计方式,各个主要部件之间通过旋转关节进行连接,动力控制采用液压泵提供动力、液压控制线路随带机械臂完成整体控制。其次,进行了专用机械臂的数学建模和运动分析,通过Lagranger函数构建了其整体的运动学模型,并完成了关键矩阵的解算。最后,改进了Sliding算法用于专用机械臂的运动控制,饱和函数替代了原有Sliding算法中的切换函数。控制试验结果表明,在Sliding控制算法下,专用机械臂的速度和位置曲线都实现了对预期速度和预期位置的准确跟踪,可以用于海上油田的实际作业。
猜你喜欢
军事文摘(2024年2期)2024-01-10
东坡赤壁诗词(2022年4期)2022-10-30
广东教育·高中(2022年1期)2022-03-16
牡丹(2021年11期)2021-07-20
意林(2020年9期)2020-06-01
制造技术与机床(2017年6期)2018-01-19
新课程研究(2016年21期)2016-02-28
电源技术(2015年9期)2015-06-05
中国交通信息化(2015年2期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01