
多种摄影方式的精细化三维建模方法与应用
2022-10-11 05:22焦甲尧
北京测绘 2022年8期
焦甲尧
(河南理工大学 测绘与国土信息工程学院, 河南 焦作 454000)
0 引言
近年来,倾斜摄影测量作为测绘行业的一项高新技术,以其快速高效、低成本、高精度等优势在众多领域得到了广泛应用。自然资源部于2021年8月发布的《实景三维中国建设技术大纲(2021版)》中明确了倾斜摄影测量作为三维形式表达基础地理实体的一种重要生产方式,这将进一步推动该技术的发展与应用。但是该技术生产的三维模型会出现地物表面凹凸不平、水域大面积缺失、悬浮物过多等问题。
为了解决倾斜摄影测量三维建模存在的问题,目前已有很多学者针对构建精细化三维模型做了大量研究工作,大致可以分3类:一是利用多源数据的融合,提高模型的精度和纹理效果。如Zhang等将影像数据、激光雷达数据和二维矢量数据融合,提出了一种基于摄影测量的由粗到精的三维模型构建方法,提高了模型重建的效率和模型精度;Hu等利用多尺度的激光点云进行数据融合,用于古建筑的精细测量并建立了精度高于3 mm的三维模型;Cheng等将激光雷达(light detection and ranging,LiDAR)点云与影像数据结合,实现了建筑物屋顶的点云分割,并建立了精细的屋顶三维模型。二是通过优化飞行器航线及影像采集方式,提高模型质量的同时也提升了作业效率。如Zheng等综合考虑了飞行器续航、起降选址,并结合相关规范,提出了一种多无人机协同航迹规划方法,得到了精细三维模型,同时提高了作业效率;李清泉教授提出优视摄影测量的概念,通过场景分析,优化选取适配场景对象空间几何结构,智能规划无人机航线及像控布设方案,利用多无人机协同构建精细实景三维模型。三是利用修模软件,对生成的三维模型进行人工修饰,优化模型的观感。如杨彦梅等探讨了模型重建的流程与方法,利用天际航实景三维测图系统完成了三维模型的精细化与单体化;何燕兰等采集了建筑物立面影像,应用单体化建模软件完成了高精度、高质量的建筑物三维模型。
本文从影像采集方式和模型修饰两个方面进行优化,提高三维模型的精度与质量。以倾斜影像、近景影像和贴近影像为数据,将倾斜摄影测量与近景摄影测量和贴近摄影测量有机结合,利用后两者在精细化建模的优势来弥补前者的不足,完成大范围实景三维模型的构建,同时对重点区域构建精细化模型。
1 基础理论
摄影测量就是利用光学传感器获取物体的影像信息,从而识别物体并测定其形状、大小、位置等信息的技术。本文采用的3种摄影测量方式——倾斜摄影测量、近景摄影测量、贴近摄影测量,均为摄影测量的一种。
1.1 倾斜摄影测量
倾斜摄影测量技术是当前主流的三维建模方式之一,通常由飞行平台搭载五镜头相机进行多角度摄影,能够获取丰富的地物侧面纹理信息,利用倾斜影像建立的实景三维模型较为逼真。该技术有快速高效、自动化程度高、成本低的优点,但是模型成果也有许多不足,部分地物纹理缺失、结构不完整、水面破洞以及大量悬浮物等问题。近年来该技术以其快速高效的建模优势已在不动产测量、城乡规划、交通勘测等领域得到了广泛的应用。
1.2 近景摄影测量
近景摄影测量由来已久,该技术的对象通常是近距离目标,能够获取被摄对象的细部结构和纹理,信息容量高。近景摄影测量有模型质量高、低成本、高效、周期短等特点,但是无法应用在大范围场景中。如今近景摄影测量技术已经发展得相对成熟,在工业、建筑、考古、医学等领域取得了不凡的成就。
1.3 贴近摄影测量
贴近摄影测量是张祖勋院士提出的一个新概念,是精细化影像获取的一种方法思路,被称为区别于竖直航空摄影测量和倾斜摄影测量的第三种摄影测量方式。该技术主要是利用拍摄设备贴近所摄物体的表面获取影像信息,获取亚厘米级的高分辨率影像,从而构建被摄物体的精细模型。贴近摄影测量弥补了其他摄影测量方式无法达到的精度要求,是一种有效的补充手段。在滑坡监测、精细化建模、古建筑重建等方面有较大应用前景。
2 研究方法
倾斜摄影测量作为当前大范围实景三维建模的主要手段之一,具有快速高效、模型逼真、精度高、自动化程度高等优点。同时该技术也存在细节纹理丢失、局部拉花、水面漏洞等问题。近景摄影测量技术主要面向近距离目标进行建模,模型成果能够保证精度和质量;贴近摄影测量技术主要面向面状目标,如边坡、建筑物表面等,能够得到纹理精细的三维模型。因此,利用近景摄影测量、贴近摄影测量在模型精度和质量上的优秀表现,弥补倾斜摄影测量模型细部粗糙的缺点,将3种技术有机结合,同时辅以人工修饰,能够得到大范围的精细三维模型成果。本文尝试从数据采集和模型处理两个方面入手,利用倾斜影像与贴近影像、近景影像融合建模,并利用天际航图像快速建模软件进行模型修饰与单体化。
数据采集方面,采用无人飞行器搭载倾斜相机,按照规划的航线获取大范围场景的倾斜影像数据,用于整个测区模型的构建。同时采用轻小型飞行器对测区内重点建筑或地物环绕飞行获取近景影像,对面状地物手动贴近飞行获取贴近影像,用于重点区域的模型重建。对采集到的3种影像分别进行空三解算,空三精度均满足要求后制作连接点并进行空三融合,得到一个完整的空三成果。
模型处理方面,所有数据经空三解算、不规则三角网(triangulated irregular network,TIN)构建、纹理映射之后,得到了整个测区的实景三维模型成果。将模型成果导入天际航图像快速建模软件中,利用软件的修饰工具对模型进行补洞、删除悬浮物等操作,同时对重点区域建筑物进行单体化建模,最终得到精细化的实景三维模型。
重建实景三维模型主要分为外业数据获取与内业数据处理两部分。本文所使用的研究方法分别从影像获取方式和模型后处理进行优化,整体实验流程如图1所示。
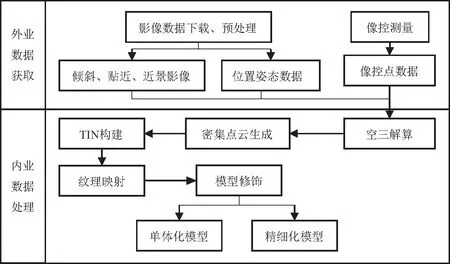
图1 实验流程
3 工程实例分析
3.1 测区概况
本文选取某地湿地公园作为实验测区,测区面积0.48 km。测区内地势较为平缓,水域较多,有部分建筑及雕塑。坐标系统采用2 000国家大地坐标系,在测区范围内均匀布置10个像控点、8个检查点。测区范围及控制点布设情况如图2所示。

图2 测区范围及控制点
3.2 数据获取
3.2.1
倾斜影像的获取测区范围内地势较为平缓,最大高差不超过20 m,因此按照固定航高飞行获取的影像数据分辨率不会有较大差距。飞行采用有实时动态载波相位差分(real-time kinematic,RTK)功能的固定翼无人机为飞行平台,搭载五镜头倾斜摄影相机进行倾斜影像的获取任务。利用飞控软件设定飞行范围并自动规划航线,相对航高190 m,航向重叠度与旁向重叠度均设置为80%。本次飞行共获取倾斜影像3 735张。
3.2.2
近景影像获取选取测区内一处雕塑作为实验对象进行倾斜影像与近景影像的融合建模。利用小型航测无人机及其自带相机,设定为环绕飞行模式,从不同高度分别对该雕塑环绕飞行获取近景影像。共获取近景影像198张。
3.2.3
贴近影像获取选取测区内一处水闸作为实验对象进行倾斜影像与贴近影像的融合建模。利用型航测无人机及其自带相机,手动控制无人机贴近水闸获取贴近影像数据。共获取贴近影像183张。
3.2.4
像控数据获取测区内均匀布设10个像控点与8个检查点,同时在水闸、雕塑处设置连接点,保证顺利完成空三加密与点云融合。像控点、检查点和连接点均采用全球导航卫星系统(global navigation satellite system,GNSS)接收机连接河南省连续运行参考站(continuously operating reference stations,CORS)网进行测量。
3.3 融合建模
比对了市面常见的几种三维建模软件,最终选择Context Capture软件作为数据处理平台。该软件支持多源数据融合建模,可以对采集端获取的多尺度影像进行联合建模。
3.3.1
影像预处理由于本次实验数据采集任务未在同一天完成,采集倾斜影像时天气晴朗,而采集贴近影像与近景影像时为阴天,因此需要对影像数据进行匀光匀色,以免模型出现较大色差,影响模型质量。实验中采用Capture One软件进行图像处理,该软件具有批量处理图片的功能,处理效果能够满足相关规范要求。
3.3.2
空三加密空三加密的目的是提取同名点,通过多视影像密集匹配得到密集点云,并将密集点云纳入坐标系统中获得同名点的坐标。实验中对倾斜摄影数据、贴近摄影数据、近景摄影数据分别进行空三,生成密集点云,然后将三者的点云进行融合,最后进行刺点。
3.3.3
模型重建Context Capture软件三维建模自动化程度较高,利用集群运算处理任务,效率较高,且建模过程无须人工干预。最终得到的实景三维模型如图3所示。
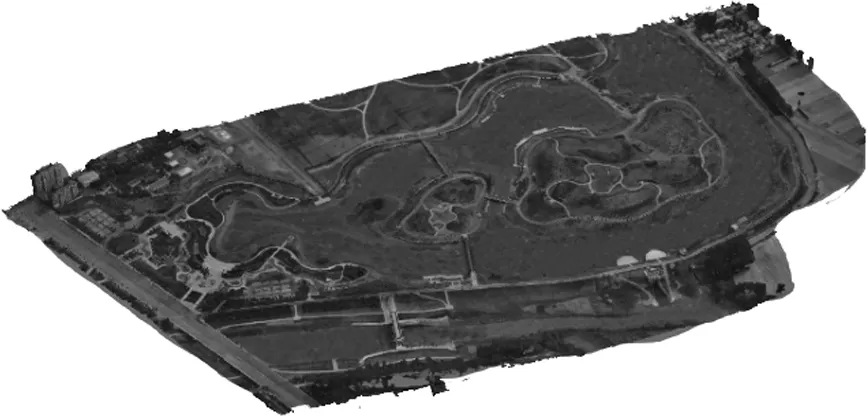
图3 实景三维模型
3.4 模型精细化及单体化
天际航图像快速建模软件可以对实景三维模型进行踏平、桥接、补洞、纹理修改等操作,能解决模型成果水面破洞、几何变形、纹理拉花、悬浮物过多等问题,同时与Photoshop、3DMAX软件联动可以实现较好的精细化建模和模型单体化。本文基于该软件完成了三维模型的精细化与单体化。
3.4.1
水面修复测区内水域较多,由于水面反射导致建模软件难以识别同名点,因此三维模型中的水域出现较多漏洞,如图4(a)所示。通过水面踏平、补洞及纹理修改等操作,能完美解决上述问题,修复后的模型如图4(b)所示。
3.4.2
悬浮物删除Context Capture软件在多视影像密集匹配时会生成一些错误点,在生成三角网时这些错误点相互连接,因此在三维模型的地面下方或空中会出现一些悬浮物,影响模型的质量和观感。图5为悬浮物删除悬浮物的前后对比。


(a)水面修复前 (b)水面修复后


(a)悬浮物删除前 (b)悬浮物删除后
3.4.3
模型单体化单体化是倾斜摄影模型应用的一个重要方向。模型中的房屋建筑等只有经过单体化,才能被选中并添加属性信息,从而集中管理。而倾斜摄影自动化建模得到的成果是一个连续的TIN网,并不会对地物进行区分,因此需要对模型成果进行一定的处理实现单体化,实现目标地物可被单独选中、查询且赋予属性信息。
实验选取测区内一栋居民楼进行单体化,单体化效果如图6所示。

图6 单体化效果
4 模型对比及精度评价
为便于对比分析,本次实验除进行了融合建模外,单独使用倾斜影像数据进行了建模。为便于表述,将单独使用倾斜影像建模得到的模型称为模型A,多种影像融合建模得到的模型称为模型B。
4.1 与近景影像融合建模的对比
本次实验利用小型无人机环绕飞行获取了湿地公园某处雕塑的近景影像,与倾斜影像结合进行融合建模。图7为模型A与模型B中主雕塑与附属物的对比。可以看出,仅使用倾斜影像重建的模型A纹理失真,细部结构不精细,甚至某些结构严重变形甚至缺失,在图7(c)中表现得尤为明显。而倾斜影像与近景影像的融合建模纹理更加真实,细部结构能够完整表达,整体模型无明显瑕疵。
实验选取的雕塑结构复杂,对三维建模有更高的要求,仅利用倾斜摄影测量的方法很难完整表达地物的真实纹理信息,而近景摄影测量以其独特的优势弥补了这一缺点,克服了倾斜影像建立的三维模型“可远观不可近看”的缺点。


(a)雕像A倾斜影像建模 (b)雕像A融合建模


(c)雕像B倾斜影像建模 (d)雕像B融合建模
4.2 与贴近影像融合建模的对比
由于贴近摄影测量主要面向的是“面”的测量,因此实验选择测区内一处水闸,利用贴近摄影的方式获取水闸的贴近影像,与倾斜影像结合进行建模。图8为水闸在模型A与模型B中的对比图。可以看出,模型A中的水闸严重变形,房檐与墙体扭曲,窗户上方的装饰物拉伸变形,下方的梁柱结构和纹理信息缺失。而在模型B中,房檐与下方结构纹理清晰、棱角分明,窗户及装饰物表达清晰完整,梁柱结构完整、纹理清晰。
实验选取的水闸面状结构较多,采用贴近摄影测量的方式获取了高分辨率的影像,最终得到精细的水闸模型,弥补了倾斜摄影测量无法重建建筑物细部结构的缺点,取得了理想的效果。


(a)模型A (b)模型B
4.3 精度评价
测区内布设了8个检查点,采用GNSS接收机测得检查点坐标作为真值。利用测图软件对实景三维模型进行裸眼测图,将测得的检查点坐标与实地测量坐标对比。分别统计模型坐标与实测坐标的差值ΔX
、ΔY
、ΔZ
,计算其平面偏差ΔS
、平面中误差m
与高程中误差m
,计算公式如下:
n
为检查点的个数。根据上述公式求得8个检查点的平面中误差为2.3 cm,高程中误差3.7 cm,其中融合建模区域的平面中误差为0.2 cm,高程中误差0.3 cm。模型精度符合规范要求,融合建模区域精度达到了亚厘米级。
5 结束语
本文将倾斜摄影测量与近景摄影测量、贴近摄影测量结合,通过优化数据获取方式获取多尺度影像,并在后期对三维模型人工修饰,得到了精细化的实景三维模型,同时实现了模型单体化,在降低精细化建模成本的同时,一定程度上解决了倾斜摄影测量建模成果“可远观不可近看”的缺陷。
本文的方法也存在一定的不足:一是利用无人机获取近景影像与贴近影像的方式为手动飞行,对作业人员要求较高;二是模型单体化效率低,大范围作业时有一定的难度。今后应从无人机航线自动规划与建筑模型自动单体化方面入手,进行更加深入的研究。
目前,如何构建精细的三维模型以及如何应用模型成果是一项研究热点,国家层面也开始加快推进实景三维中国的建设。本文在精细化三维模型的构建方面进行了一些尝试性研究,以期为后续研究提供一定的参考。今后还需尝试采用其他方法快速高效地进行精细化实景三维模型的构建与建筑物单体化。
猜你喜欢
储能科学与技术(2022年2期)2022-02-19
科学与生活(2021年19期)2021-10-30
现代企业(2021年2期)2021-07-20
青年文学家(2021年1期)2021-03-24
华人时刊(2021年23期)2021-03-08
三联生活周刊(2017年48期)2017-11-25
课堂内外·教师版(2017年3期)2017-04-13
汽车之友(2016年15期)2016-08-23
科技创新与应用(2016年9期)2016-05-14
天津诗人(2014年1期)2014-11-14
