
LiDAR-DP软件对点云数据自动分类结果分析
2022-10-11 05:22董倩茹
北京测绘 2022年8期
董倩茹
(甘肃省测绘工程院, 甘肃 兰州 730000)
0 引言
机载激光雷达是将激光用于回波测距和定向,并通过位置、径向速度及物体反射特性等信息来识别目标。机载激光雷达是基于激光扫描技术、全球定位系统(global positioning system,GPS)技术和惯性导航技术集成的一个软硬件系统,也是遥感测量领域的一门新兴技术。
激光雷达(light detection and ranging,LiDAR)系统可以采集到惯性测量单元(inertial measurement unit,IMU)数据、GPS数据、坐标数据、高程数据、回波强度、数码照片等,最终地物的三维坐标及回波强度等信息会输出到Las格式的点云文件中。Las格式(.las扩展名)是LiDAR点云的标准交换数据格式,是由美国摄影测量与遥感学会(American Society for Photogrammetry and Remote Sensing,ASPRS)下的LiDAR委员会于2003年开始发布的LiDAR数据的标准格式。
机载激光雷达点云数据处理软件(light detection and ranging-data processing,LiDAR-DP)软件是一套拥有自主知识产权的国产软件,是中煤(西安)航测遥感研究院有限公司开发的机载LiDAR点云数据处理软件。该软件提供了一系列全流程、智能化的机载LiDAR点云数据处理工具,支持海量点云批处理,能够快速生成数字表面模型(digital surface model,DSM)、数字高程模型(digital elevation model,DEM)和等高线等基础测绘产品。
1 项目及数据概况
本文结合黄河干流临夏永靖至黄河石林LiDAR影像处理及数字地形图更新项目,以机载LiDAR点云数据作为数据源,LiDAR-DP软件为研究对象,对其渐进三角加密滤波算法对点云自动分类的效果进行探讨,并针对不同地物、地形、地貌总结出一套可行的解决方案,为今后使用该软件对点云数据处理,提供经验与方法。
本项目LiDAR点云数据于2020年8月,由塞斯纳208飞机搭载GalaxyPrime航摄仪获取,绝对航高为5 900 m,航带旁向重叠度:平均重叠度为33%,整体重叠度为16%~58%。机载LiDAR扫描点云分布均匀、无异常点,点间距优于2 m,平均点密度0.7点/m,高程精度±0.108 m。摄区范围包括黄河甘肃段部分区域,地处甘肃省中部、黄河上游区域。
2 LiDAR-DP软件对点云数据自动分类
2.1 渐进三角加密滤波算法
LiDAR-DP软件在自动分类中使用的是一种利用单次或者多次激光回波数据剔除非地面点,保留地面点的滤波算法:渐进三角网加密滤波算法,该算法属于基于不规则三角网(trianglated irregular network,TIN)的滤波算法。类似的算法还有基于坡度的滤波算法、基于数学形态学的滤波算法、移动曲面拟合法、基于扫描线的滤波算法、基于聚类分割的滤波算法。
渐进三角网加密滤波算法的主要原理是在测区内按照指定大小进行分块,选择分块内的最低点作为种子点,用这些种子点构建一个初始TIN,然后根据一定的阈值,根据不规则三角形内激光脚点距三角形面的距离来判断其是否为地面点,再利用已知的地面点构建一个新的TIN,如此迭代,直到没有新的地面点加入为止。
渐进三角网加密滤波算法存在的问题有:①主要依赖种子点的选取精度;②地面点判断的准则较单一;③加密精度对噪声较敏感。
2.2 LiDAR点云数据情况分析
经过对测区范围内的点云分类数据进行分析,发现测区河流等易形成镜面反射的区域较多,主要以下几个特点:
(1)由于本次项目范围主要包括黄河干流及两岸沿线区域,测区内水库、湖泊、河流,造成LiDAR激光束被水体吸收,导致回波信号的缺失。
(2)在机载LiDAR扫描过程中,不但存在系统误差和偶然误差,还存在极高点和极低点。极高点可能是激光脉冲受到空中个别物体,如旗杆;低飞飞行物,如飞鸟等的干扰,形成高位粗差,也会因为激光测距仪本身原因或者地面目标对激光产生多路径效应产生低位误差。这些粗差点被称为噪声点,判别方式是与局部邻近点存在高程突变或者频率突变。
(3)在本测区中由于黄河中存在大量泥沙、船只,造成在黄河干流水域内部存在大量伪地面点。
(4)在本测区中存在森林植被密集覆盖区域,LiDAR点云穿透率低,造成这部分区域LiDAR点云地面点的反射率也偏低,难以找到地面点。
(5)由于测区涵盖甘肃省省会城市兰州,兰州又是西北地区铁路、公路、水路、航空兼备的综合性交通运输枢纽,所以测区内部存在大量高架路、桥,造成相邻地物边缘存在点云数据的高程突变,对点云数据的分类有一定影响,且此类区域缺失地面点。
(6)机载LiDAR是通过接收被目标反射回来的激光脉冲来获取目标物的信息,回波的强度与目标的材质有关。除了水体以外,有些物体对激光的吸收程度也很大,例如:深色材料、沥青路面等,该区域会出现缺失回波点的情况。
2.3 点云数据的预处理
LiDAR点云数据在自动分类之前需要进行预处理,预处理分为4个步骤:(1)高程系统的转换。(2)自动消除冗余点。(3)点云分块。(4)自动分类噪声点。
2.3.1
高程系统的转换提供的点云数据平面坐标系为2000国家大地坐标系,高斯-克吕格投影,高程系统为大地高。先将甘肃省似大地水准面精化成果(*.bin)文件转为(*.txt)文件,然后利用LiDAR-DP软件中的坐标转换工具选择高程改正,在参数设置中选择之前转换好的高程异常值(*.txt)文件,将大地高转化为正常高。
2.3.2
自动消除冗余点使用的是LiDAR-DP软件中消除冗余的功能。该功能能够自动识别并剔除点云条带间的重叠数据,支持多个条带批量自动处理。
2.3.3
点云分块使用LiDAR-DP软件工具中的点云分块工具,可以按照生成的标准图幅框、自定义大小或者自定义数据块数目,对点云数据进行分块。由于摄区总面积为10 440 km,摄区有63条航线,72条数据,点云数据量太大,所以对点云数据进行了分块,分块的尺寸取决于数据处理软、硬件性能。
2.3.4
自动分类噪声点LiDAR-DP软件支持对离散噪声(粗差)点和密集噪声点的自动识别。需要设置的参数为采样半径和分类为低点的阈值。
2.4 点云数据自动分类
点云分类主要是利用LADAR-DP软件中的点云分类批处理功能,利用其改进的渐进三角网加密滤波自动算法将点云数据按照地面点(Ground)和未分类点(Unclassify)进行分类分层。自动分类效果对比如图1所示。

(a)山地自动分类前 (b)山地自动分类后


(c)平地自动分类前 (d)平地自动分类后
滤波的普遍情况是在地形起伏缓慢的地方滤波效果较好,但出于地形结构线附近的地面点往往因为坡度或者高程变化较大而被误分至未分类点。
2.5 LADAR-DP软件自动点云分类情况分析
为了提高自动滤波的精度,提高整体工作效率,本项目使用了人机交互的半自动混合滤波方法。下列情况分别用点云数据图、DEM晕渲图、数字正射影像图(digital orthophoto map,DOM)进行展示。针对本项目地物、地形、地貌特点,对LADAR-DP软件在激光雷达数据滤波算法自动点云分类结果,做出以下情况分析。
2.5.1
对建筑物的分类情况具体情况如图2所示。


(a)规则建筑物分类 (b)不规则建筑物分类
(c)依山而建房屋分类
经分析可以得出如下结论:
(1)对规则建筑物的分类基本准确。
(2)在不规则形状建筑物时,尤其是建筑物存在高低错落的情况,容易出现错分、漏分的现象,解决方式主要依靠错分点重新分类方法。
(3)在依山而建的房屋处,分类比较混乱,解决方式主要依靠添加断裂线约束。
2.5.2
对桥梁和高架路的分类情况具体情况如图3所示。

(a)大规模的桥梁和高架路

点云断面图 (b)大规模的桥梁和高架路
影像图


(c)小面积桥梁点云断面图 (d)小面积桥梁影像图
经分析可以得到以下结论:
(1)对规模较大的桥梁和高架路的分类基本准确。
(2)在小面积桥梁上容易存在错分、漏分的现象。解决方式主要依靠错分点重新分类方法。
2.5.3
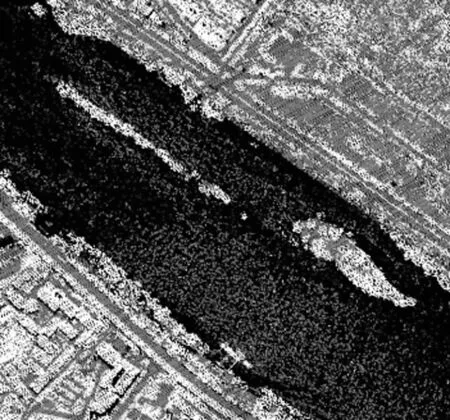
对植被覆盖地表的分类情况具体情况如图4所示。


(a)植被稀疏分类 (b)树木茂盛分类


(c)密集农作物分类 (d)大面积温室大棚分类
从图中可以得到如下结论:
(1)植被稀疏区域分类基本准确。
(2)树木植被茂盛区域,由于枝叶茂盛,只有极少量点能穿过枝叶缝隙到达地面,分类效果较差。由于地面点过少,此处生产DEM时可以采用区域内自动减去平均树高获取地面高程,或者用其他近期且满足精度的DEM数据进行替换。
(3)在人工种植的密集农作物,例如:黄河两岸种植的大片玉米地等,由于农作物密集,容易出现分类错误的现象,解决方式主要依靠错分点重新分类方法,或者添加断裂线约束。
(4)测区存在大面积温室大棚,在本软件滤波算法中,分类不彻底,有些被分在地面点层,有些被分在未分类点层,解决方式主要依靠错分点重新分类方法,或者添加断裂线约束。
2.5.4
对水体的分类情况具体情况如图5所示。

(a)小面积静止水体分类 (b)沟渠分类
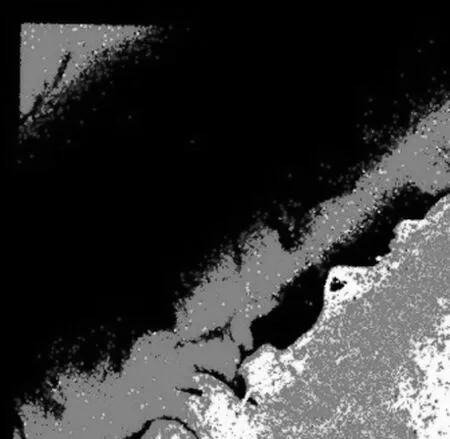
(c)河流分类 (d)水库分类
经分析可以得到以下结论:
(1)小面积静止水体分类基本准确。
(2)沟渠的分类基本准确。
(3)河流的分类存在较多不合理的现象,存在大量伪地面点,解决方式主要依靠添加断裂线约束。
(4)水库的分类也存在较多不合理的现象,也存在大量伪地面点,解决方式主要依靠添加断裂线约束。
2.5.5
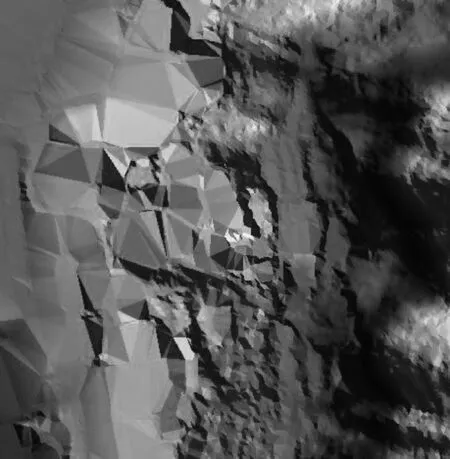
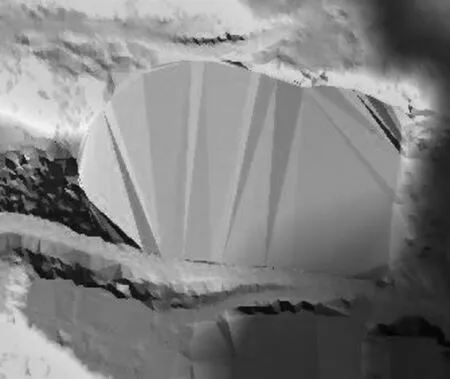
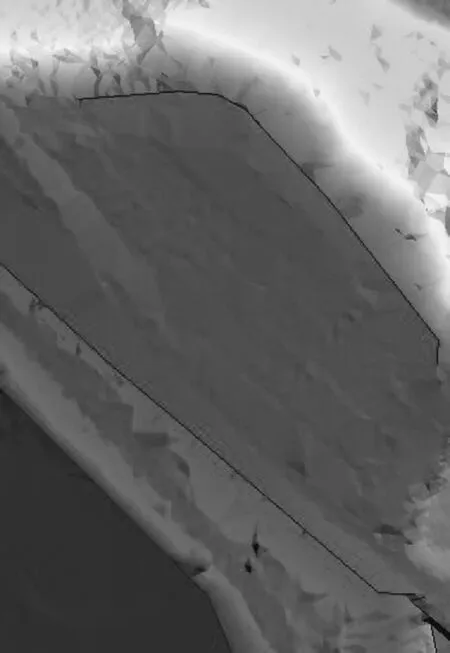
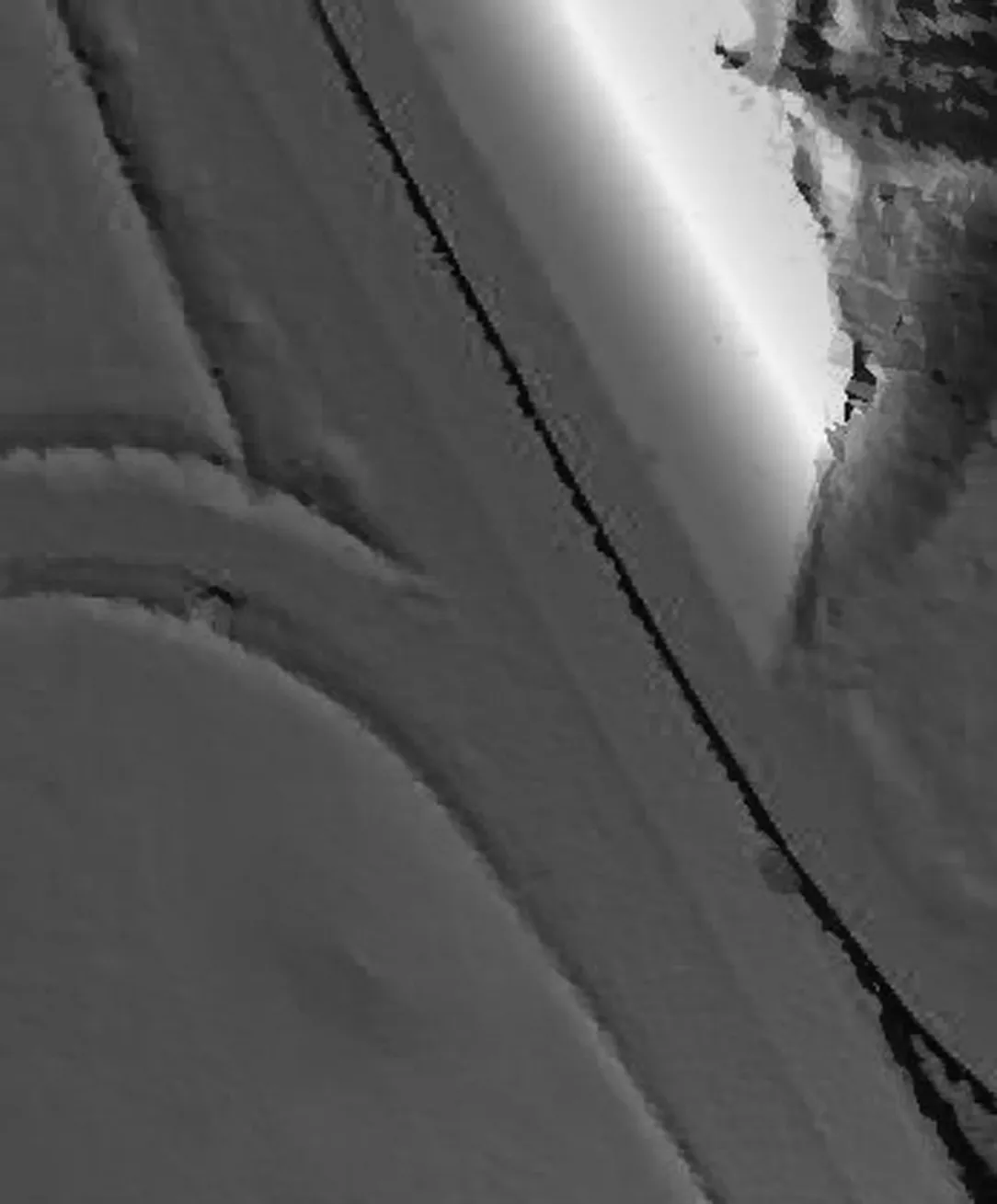
对高程突变的地貌分类情况具体情况如图6所示。
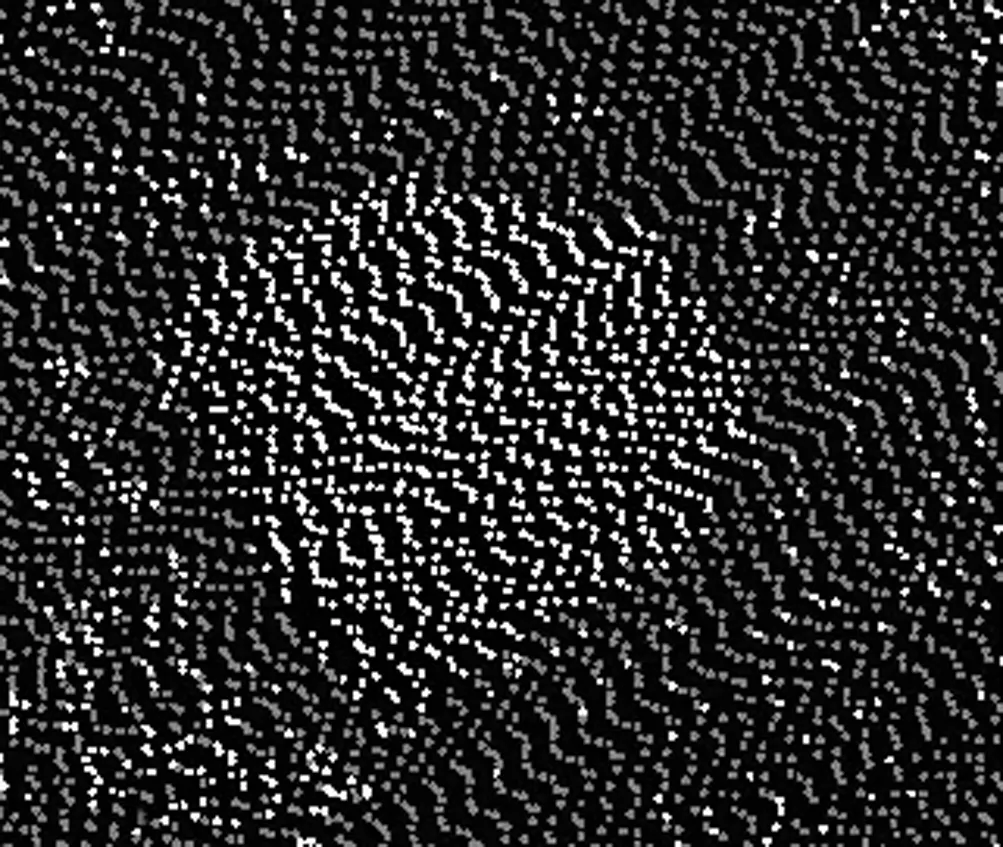

(a)大型土堆分类
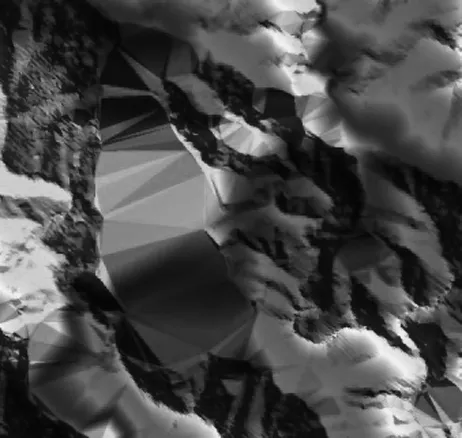
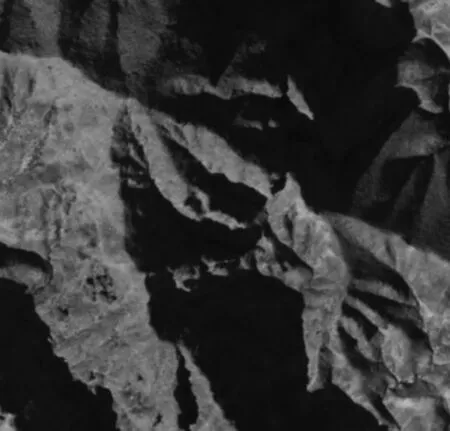
(b)复杂山体分类
(1)大型土堆被不合理滤除,解决方式主要依靠找回地面点。
(2)部分山体被不合理滤除,此处主要是在黄河石林独特的地貌结构,多存在独立石峰,石柱等,解决方式主要依靠找回地面点。
3 LADAR-DP软件人工分类编辑
LADAR-DP软件人工分类主要有3种方法:找回地面点、错分点重新分类、断裂线约束。
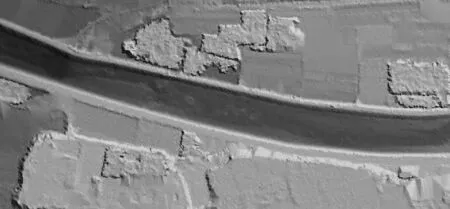
3.1 找回地面点
适用于地面点被错分至未分类点,主要使用工具为添加地面点。主要参数设置有地标类型、高度阈值、角度、采样间隔、区域类型等。具体实例如图7。

(a)自动分类晕染图 (b)点云断面图


(c)找回地面点后晕染图 (d)DOM影像图
3.2 错分点重新分类
适用于未分类点被错分至地面点,以及高架路、桥梁分至路层。主要使用工具为线上分类、线下分类、多边形分类、流线分类、线间分类、画刷分类等。
(1)分类点被错分至地面点重新分类具体实例如图8所示。


(a)自动分类晕染图 (b)点云断面图


(c)重新分类晕染图 (d)DOM影像图
(2)高架路、桥梁重新分类至路桥层。
3.3 断裂线约束
适用于不连续的地形,即地面出现转折或者突变的地方。
3.3.1
断裂线实例陡坎、梯田、路堤、路堑等断裂线实例如图9所示。
(a)陡坎、梯田断裂线实例 (b)路堑断裂线实例
3.3.2
水体断裂线约束方法对封闭范围的静止水体,使用添加区域断裂线,自动拾取区域内最低点高程,具体实例如图10(a)所示。对存在高差的河流使用添加河流断裂线,然后人工拾取起始点高程、终止点高程,具体实例如图10(b)所示。


(a)静止水体 (b)河流
3.3.3
建筑区密集地区由于超高层建筑遮挡,或者建筑错综复杂,需要依靠断裂线来辅助分类,断裂线约束实例如图11所示。
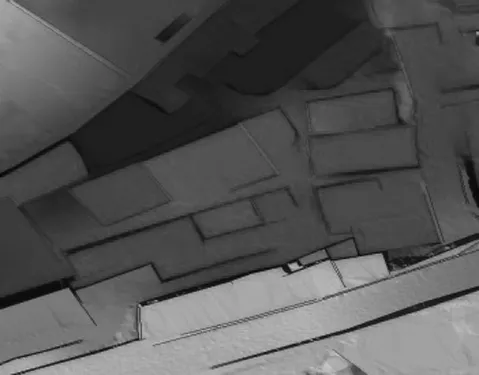

(a)层叠式建筑


(b)中心城区建筑
4 结束语
通过结合本项目实际生产使用情况,对LiDAR-DP软件根据改进的渐进三角网加密滤波算法进行自动分类的结果进行了详尽的分析,并根据不同的地物、地形地貌做出了不同情况的判别,针对不同情况也给出了相应的人机交互半自动滤波的解决方法,可以得出如下结论:①LiDAR-DP软件在地形、地物复杂的区域自动分类容易出现错误。②LiDAR-DP软件在低矮植被、裸露地表区域地形特征保持较好,规则地物尤其是建筑物,滤波效果有效。③LiDAR-DP软件在人机交互的半自动混合滤波方法中便捷高效,精度能够满足DEM、DSM以及等高线的生产需求。在实际生产中存在以下问题,可以优化改进:①在植被密集区域该软件自动分类效果较差,该算法仍有待优化。②断裂线约束可增加约束范围,如沟类地形,只需在沟底添加一条断裂线即可达到约束效果。③该软件点云数据接边功能尚待完善,对数据量大的数据进行接边时易出现软件卡死现象。
猜你喜欢
绿色科技(2022年16期)2022-09-15
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
军民两用技术与产品(2022年1期)2022-06-01
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
小天使·一年级语数英综合(2017年11期)2017-12-05
初中生世界·七年级(2017年9期)2017-10-13
少儿科学周刊·儿童版(2017年3期)2017-06-29
计算机应用(2016年10期)2017-05-12
