
基于无人机航测与三维激光扫描的山体滑坡地质灾害监测方法
2022-10-11 05:22杨飞
北京测绘 2022年8期
杨 飞
(广东明源勘测设计有限公司, 广东 河源 517000)
0 引言
大型地质工程在我国地质勘测发展中占据重要地位。相比其他国家,我国的工程地质灾害发生次数与发生频率也相对较高。综合行业的不完全统计与报道数据显示,大部分工程地质灾害为地质山体滑坡灾害、泥石流灾害、地质层结构层坍塌灾害等,且每年由于工程地质灾害造成的工程损失超过100亿元,每次工程地质灾害受到损伤的人数都超过150人。为了避免工程地质灾害的发生,应当尽量将安全事故控制在事发前,即做好对工程地质灾害的监测与预防。目前,国内科研单位地质灾害的监测大多集中在地表土层形变监测、地层深部位移量监测、地质结构力学参数与环境形变因素(包括地下水、地表水、地层水分饱和量等),但上述监测内容均为地层宏观监测,无法将监测的结果作为直接决策地质灾害的要素。同时,大部分监测单位在开展此方面工作时,使用全站仪与全球定位系统(global positioning system,GPS)进行环境监测,此种监测形式属于单点检测,即需要在监测前,选定一个具体作业点,通过对工程地质中重要点的观测,进行地质结构稳定性与牢固性的分析。此种监测方式在实际应用中最显著的问题是,智能通过对监测点数据的获取,进行地区地形连续性的预测,一旦监测点数据出现缺失,会预测结果失去连续性。为了提高监测数据的连续性,实现将工程地质灾害控制在事前,本文将辅助使用无人机航测设备,结合三维激光扫描技术的优势,设计一个针对山体滑坡地质灾害的监测方法,通过此种方式,实现监测与测绘结果的高精度。
1 硬件架构设计
为了满足本文监测方法在实际应用中的需求,应在设计方法前,进行硬件构成的描述,并结合作业环境,对硬件单元进行分区。本次设计监测方法的硬件架构共由6个单元构成,不同单元中的硬件设备不同。例如,采集单元主要负责对工程地质区域实时数据的获取;监测单元主要使用无人机航测仪与三维激光扫描仪,进行采集数据的监测;供电单元主要负责为不同硬件设备的运行提供电力支持;控制单元主要负责对不同控制器的调整、对指令的执行与调度;终端单元主要负责对监控数据的显示;报警单元主要负责对监测结果中异常数据的告警。多个硬件模块在网络支撑下协同运行、相互辅助,从而构成一个完整的硬件架构。具体内容如图1所示。

注:①可编程逻辑控制器(programmable logic controller,PLC);②全球广域网(world wide web,Web)。图1 山体滑坡地质灾害监测方法硬件架构
图1详细地描述了不同硬件单元的构成及其之间的关系,对图1的分析可知,监测单元是本文设计监测方法的主要构成,以下将以监测单元为例,进行硬件设备的详细设计。
1.1 无人机航测仪
为了实现对方法功能的优化,此次设计选择的无人机航测仪为大疆MavicAir2.0无人机航拍器,其型号为DJI Mavic-Air 2,可兼容平台为安卓系统(Android)和苹果公司开发的移动操作系统(iOS)。属于国产飞行器中的优质生产厂家,在此基础上,优选四轴飞行器作为支持无人机航拍器的主要结构,辅助遥控手柄进行飞行器在空中的飞行控制。为了避免飞行器自重过重对监测工作造成影响,需要将无人机的自重控制在1.50 kg以内,以此种方式,保证飞行器在空中的最大飞行高度>120.0 m,相比市场内普遍售卖的飞行器,此型号的飞行器具有实用轻便、性能强大、聪明易拍、满足升级等优势。无人机航测仪器前端的索尼8 K双摄像头与三轴云台,可以为无人机的飞行与航拍自动提供障碍躲避功能。同时,在飞行时,飞行器可以发射超声波进行,进行前端障碍物的自动检测,并以每秒1.0次的频率进行自检,当自检出现异常时,终端显示将触发无人机的飞行预警,并根据其续航能力,选择是否自动返回。
1.2 三维激光扫描仪
在本文设计的监测方法中,选择北京星瑞通航科技有限公司生产的天宝Trimble X7三维激光扫描仪作为使用仪器。扫描电子激光测距(electronic distance measurement,EDM)激光类别为1类激光,对人眼无伤害,符合IECEN60825-1标准。激光波长为1 550 nm,视场为360°×282°,影像最快扫描时间154 s,最大扫描速度500 kHz;测距噪声<3 mm@60 m,80%反射,测程0.6~80 m,测距精度2 mm;仪器内包含3个同轴校准10百万像素(mega pixel,MP)的相机,每个影像分辨率为3 840×2 746,可在25 s内完成全面自动校准测距,可通过无线局域网(wireless local area networks,WLAN)或通用串行总线(universal serial bus,USB)接口技术进行控制,将采集数据保存在Windows10 Corei7 2.5千兆赫兹(giga hertz,GHz)处理器或更高配置电脑中。通过光学字符识别技术(optical character recognition,OCV)进行扫描成果中关键信息的抓取,当识别到存在异常的图像或信息时,可以通过操作终端的方式,进行扫描结果自动纠偏,从真正意义上做到了扫描成像的省时、省力,满足本文监测方法在实际应用中的需求。
2 软件设计
2.1 基于无人机航测的工程地质场景扫描
使用DJI MavicAir2.0无人机航拍器,进行工程地质场景数据源的获取。在此过程中,使用多个不同倾斜角度的相机与GPS接收机集成在仪器前端,使用操作手柄,进行数据的初步获取,其中惯性测量单元(inertial measurement unit ,IMU)端可以通过对无人机飞行中定位姿态与定位定姿系统(position and orientation system,POS)数据的融合,进行获取图像的整理,完成基础图像的整理后,所有由前端反馈的信息将通过无线传输网络被传输到“场景文件夹”中,以供后期技术人员与工作人员进行数据的调用。无人机航测的工程地质场景数据采集技术路线如图2所示。
按照上述图2所示的流程,对监测的工程区域进行扫描,以此种方式,完成对监测区域图像与数据信息的获取。

图2 无人机航测的工程地质场景数据采集技术路线
2.2 基于三维激光扫描技术的点云数据处理
完成对监测区域图像的采集后,在工程区域内设置基准点观测墩,架设三维激光扫描仪器,进行扫描定向。根据区域地质情况与山体滑坡地质灾害危险源,设定扫描参数,通过此种方式,获取工程地质区域中的点云数据。参数设置如表1所示。

表1 三维激光扫描参数设计
按照述表1中的内容,进行监测区域点云数据的获取。完成数据的初步获取后,按照“数据编辑→配准→拼接→建模”的步骤,进行数据处理。在编辑处理过程中,辅助使用计算绘图设备,进行图像中粗差的消除与剪切,保留有效数据与价值数据,确保所有保留数据与工程地质建模相关。在进行点云数据配准与拼接时,需要在图像中建立一个公共坐标点,将此坐标点表示为原点,点坐标为(0,0,0)。根据获取图像在空间中的位置,导入坐标轴,确保不同点坐标在空间中可形成一个整体。除此之外,也可以通过直角坐标系转换的方式,进行数据格式的直接化与统一化处理。在进行数据建模时,可以根据数据与物体之间的形状匹配程度,建立实体化模型,以此种方式,实现对点云数据的处理。
2.3 纹理映射与地质灾害影像匹配
在完成上述处理后,对采集的监测区域点云数据信息进行三维建模,为了进一步增加信息的表现力,增加监测结果的真实感,需要将实拍的图像与建立的三维模型进行纹理映射,通过对两者之间关系的描述,进行地质灾害影像的匹配。
在此过程中,数码相机成像可以通过坐标轴转换的方式进行像素点平行转换,转换过程可以使用计算公式。
(1)
式中,Z
表示为转换后的地质坐标数据;u
、v
和j
表示为原始坐标;f
表示为镜头与成像距离;表示为平移向量;R
表示为外部特征点;T
表示为匹配周期;X
、Y
、Z
分别表示为匹配后监测点坐标;W
表示为内部纹理参数。按照上述方式,对监测点进行坐标匹配,完成匹配后,将其与山体滑坡地质灾害评价指标进行匹配,当存在某点异常时,可以认为此区域存在山体滑坡地质灾害危险。综合上述分析,实现对监测区域纹理的映射与地质影像的匹配,实现本文方法的设计。3 对比实验
3.1 试验区域概况
为了证明本文设计的监测方法可以在实际工作中起到既定的监测效果,下述将采用对比实验的方式验证设计方法的有效性。此次实验选择的监测点为平庄集团矿业有限公司开发的矿区,此矿区属于露天矿,对应的工程自2013年开始实施,工程生产单位采用常规的采矿技术进行地质层中矿物质的获取,截至今日矿区的资源产出量已供应了该地区三家工业生产厂。目前,此露天矿已经属于生成的中后期,由于矿体受到过度开采等方面因素的影响,已出现严重的山体滑坡隐患,此因素已成为制约企业矿山工程继续实施的关键要素。
3.2 采用本文设计监测方法布置监测点
为了满足矿区山体滑坡地质灾害与地形变化的监测需求,应根据地质工程实施的条件,在区域进行布置监测点。参照早期工程地质监测画面,根据山体滑坡区域的地形图布置监测点,对应的地形图与监测点示意图如图3所示。

(a)监测点地形图
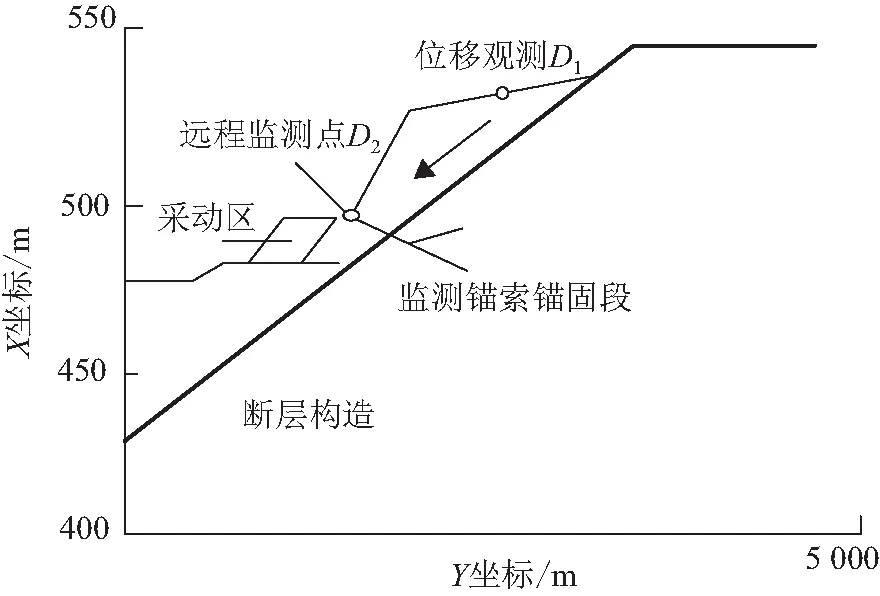
(b)监测点示意图
完成对监测点的布设后,将三维激光扫描仪器布置在D
与D
点,辅助无人机进行地质数据的航拍获取。为了证明此方法具有真实的使用效果,在完成对基础环境的布置后,对D
点进行为期3个月的位移监测。首次监测时,将矿区整体地质结构进行空间建模,原点坐标表示为(0;0;0),监测得到D
点的相对坐标为(X
:356.32 m;Y
:235.61 m;Z
:256.32 m),间隔30.0 d后,进行矿区整体地质结构中D
点的第二次监测,监测后得到D
点的相对坐标为(X
:356.31 m;Y
:235.60 m;Z
:256.32 m),再次间隔30.0 d,进行矿区整体地质结构中D
点的第三次监测,监测后得到D
点的相对坐标为(X
:356.30 m;Y
:235.59 m;Z
:256.31 m)。综合上述数据的变化趋势可知,D
点X
坐标与Y
坐标在每次监测数据中都下降了0.01 m,Z
坐标在最后一次监测中数据下降0.01,表明监测区域整体存在下沉趋势,证明此矿体存在地质山体滑坡的隐患。通过对D
点3次数据的整理,可以掌握地质层某一具体监测点的变化趋势。由此可以说明,本文监测方法与矿产单位完成对接后,可以实现对此企业矿山工程作业提供辅助性数据作为帮助。3.3 与其他监测方法对比
选择企业现阶段使用的基于三维地理信息系统(three-dimensional geographic information system,3D GIS)与全站仪的监测方法与传统的基于实时动态载波相位差分(real-time kinematic,RTK)技术与北斗卫星技术的监测方法作为实验的对比方法,与本文提出的基于无人机航测与三维激光扫描的山体滑坡地质灾害监测方法进行有效性对比。选择设计的D
点作为测试点,采用3种方法共同对D
点进行监测,监测时长为半年。D
点的相对坐标为(X
:253.62 m;Y
:220.13 m;Z
:235.61 m),将其中Z
点的位移变化作为评价地质山体滑坡灾害的依据。在使用本文方法进行监测数据的获取时,可通过对前端点云数据的匹配进行山体滑坡地质灾害位移数据的校正,根据校正结果,输出点云数据变化趋势;在使用基于3D GIS与全站仪的监测方法监测时,将全站仪测得的数据与地质结构空间模型进行匹配;在进行基于RTK与北斗卫星技术的监测方法监测时,将卫星成像数据与地质结构空间模型进行匹配。3种方法按照上述方式进行数据点的匹配,将自行校正后的监测数据以统一格式进行导出。
3.4 实验结果分析
每间隔一个月获取一次实验数据,通过时长为半年的监测,获得3种方法监测下该区域6个月的监测数据,将获得的数据点使用平滑曲线进行连接,得到D
点位移数据的对比实验的结果,如图4所示。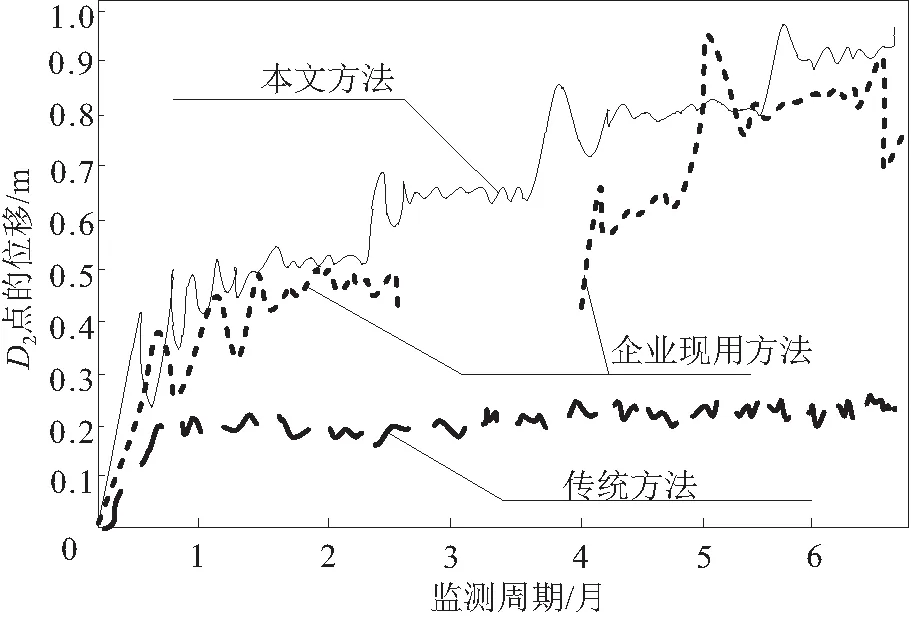
图4 对比实验结果
从上述图4所示的实验结果可以看出,本文监测方法与企业现阶段应用的基于3D GIS与全站仪的监测方法,在完成为期6个月的监测后,监测数据走向基本一致,但使用全站仪进行检测得到的结果连续性较差,在第3个月至第4个月时,监测数据存在缺失,监测结果缺乏连续性。在使用基于RTK与北斗卫星技术的监测方法进行山体滑坡地质监测时,发现方法监测数据值无显著变化,而参照D
点监测结果可知,此监测区可能存在地质山体滑坡灾害。因此,D
点的坐标值一定会发生变化,证明传统监测方法在实际应用中的监测效果与实际数值可能存在偏差,无法将此方法的监测结果作为地质灾害决策的依据。综合上述分析可知,无论是企业现阶段应用的基于3D GIS与全站仪的监测方法,还是传统的基于RTK与北斗卫星技术的监测方法,在本次实验监测过程中,均存在不同层面上的不足,其中矿山企业现用的监测方法监测数据较为准确,但监测数据无法保证连续性;传统方法监测的数据可保持连续性,但无法保证监测结果准确。因此,在完成实验后,得出此次对比实验的最终结论:相比另两种监测方法,本文设计的基于无人机航测与三维激光扫描的山体滑坡地质灾害监测方法在实际应用中,可以保证监测结果数据具有较强的连续性与较高的准确度。
4 结束语
本文提出基于无人机航测与三维激光扫描的山体滑坡地质灾害监测,方法设计,将本文方法与基于3D GIS与全站仪的监测方法、基于RTK与北斗卫星技术的监测方法进行对比,发现相比传统的方法,本文开发的工程地质灾害监测方法在实际应用中,可以保证监测结果数据具有较强的连续性与较高的准确度。因此,可在后期的研究中,尝试将本文方法代替传统方法,在市场内进行推广,以此种方式,提高地质灾害监测结果的价值性,实现将灾害事件控制在发生前,从而降低或减少地质单位在工程实施中的经济损失。
猜你喜欢
地球科学与环境学报(2022年4期)2022-08-25
煤气与热力(2022年4期)2022-05-23
科海故事博览·中旬刊(2022年4期)2022-04-23
计算机应用与软件(2022年2期)2022-02-19
河南农业·综合版(2021年7期)2021-08-23
环球市场信息导报(2018年29期)2018-10-16
大陆桥视野·下(2016年10期)2016-12-16
