
速度和载荷对频率法胎压监测系统性能的影响
2022-10-11 17:01夏怀成韩向阳胡宽答
汽车安全与节能学报 2022年3期
夏怀成,韩向阳,胡宽答
(燕山大学 车辆与能源学院,秦皇岛 066004,中国)
据交通部门统计,中国大陆70%的高速公路上发生的交通事故是由于爆胎引发的。美国这一比例更是接近80%。根据美国汽车工程师协会统计分析,由于轮胎漏气、内部压力过低以及温度过高等原因造成的交通事故接近20 万起[1]。当轮胎压力过低时,由于弹性迟滞现象,造成轮胎温度急剧上升。归根结底,交通事故主要是轮胎压力异常造成的,因此,美国在2007年出台相关政策,要求并强制实施轮胎压力监测系统(tire pressure monitoring system,TPMS)。随后欧洲、韩国、中国也相继推出相应的法律法规。
间接式胎压监测常用的方法有半径法和频率法。半径法是根据车轮滚动半径变化识别轮胎是否缺气,当轮胎气压降低时,滚动半径减小,相对于其他正常气压的轮胎,轮胎旋转速度增加,只需对比不同轮速传感器脉冲数即可识别1~3 个轮胎是否欠压[2-3]。但是,当4 轮同时欠压时,半径法无法识别轮胎是否缺气,在这种情况下,轮胎的扭转振动频率可以检测4 轮同时缺气工况。中国大陆学者针对频率法胎压监测算法进行了研究[4-6],然而在以往研究中没有考虑车辆行驶速度和载荷变化对振动频率的影响。
本文在频率法为原理的胎压监测系统基础上,分析了不同速度和车内载荷下振动频率变化规律,证明了速度和振动频率满足一定的函数关系、且不同载荷下振动频率存在交叉的可能性,提出了速度补偿和载荷识别方案。
1 频率法胎压监测原理
轮毂在正常使用过程中不会产生变形,可以等效为刚体;而轮胎由橡胶制造而成,本身属于弹性体,同时具有衰减能量的作用,即具有阻尼特性。因此,可以将车轮看作由刚体和弹簧-阻尼系统组成,如图1 所示。其中:F表示系统外力;φ表示轮胎旋转方向;r表示滚动半径;J表示轮胎绕旋转轴的转动惯量。整个轮胎系统由弹簧和阻尼替代,包括垂直和扭转两个方向,振动模型如图2 所示。模型中:m表示垂直方向的轮毂质量;K代表弹簧刚度;C代表阻尼因数;x代表轮毂的垂向位移;α表示扭转的角度。
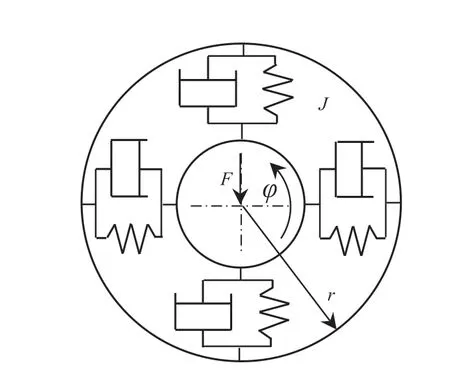
图1 轮胎等效模型
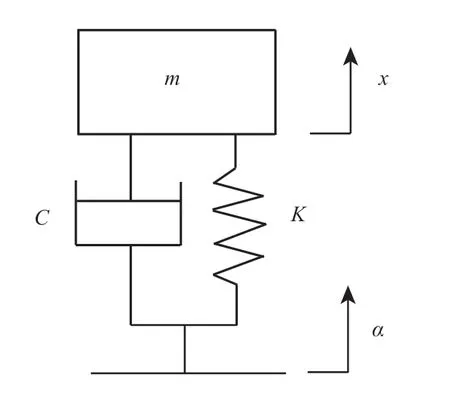
图2 轮胎振动模型
对轮胎系统进行动力学分析,可得以下方程:在垂直方向上,有

在扭转方向上,有

对微分方程进行Laplace 变换,可得其传递函数为

对于输入量为外力f(t)的弹簧阻尼系统,传递函数又可表示为
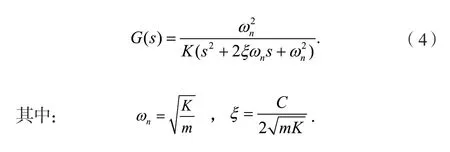
令s=jω,ω=2πf带入传递函数,求取G(jω)的幅值,对其求导,得到振动频率为
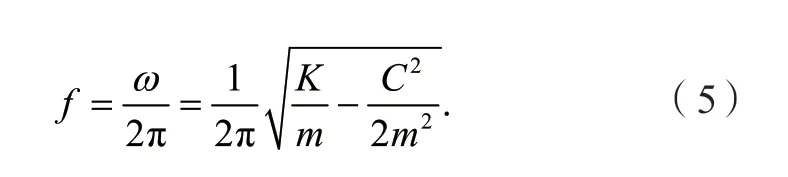
由式(5)中能够看出,轮胎振动的频率取决于系统的弹簧刚度以及阻尼因数,而胎压和弹簧刚度以及阻尼因数有关,通过监测频率的变化能够实现对轮胎的缺气识别。
频率法胎压监测系统中仅使用角速度做频域分析,角速度直接影响频率估计值,而车轮转速受到滚动半径的影响,当车内载荷发生变化时,轮胎的垂向载荷改变,导致滚动半径产生波动,比如车轮垂向载荷减小、车速增加,滚动半径均增加[7],这些因素将导致轮胎的角速度发生变化,最终引起频率发生改变。
2 轮速传感器信号采集系统的设计
2.1 轮速传感器工作原理
轮速传感器根据工作原理可以分为磁电式、磁阻式以及Hall 式3 种。目前,汽车行业中Hall 式传感器应用最为普及[8-9],Hall 传感器由Hall 元件、永磁体和电子电路组成。Hall 式传感器一般固定每个车轮的轮毂上,车辆在行驶过程中,齿圈随车轮转动而旋转,使得齿面与传感器之间的距离不断变化,引起磁感线穿过Hall 元件的数量发生变化,最终传感器输出电流信号发生高低电平变化。通过对这个信号进行采集,即可得到车轮的转速信息。
2.2 预处理电路
使用示波器测量传感器输出信号,由于自身精度和外界干扰等问题,使输出的原始信号存在误差。为保证采集信号的精准性,需要对传感器输出信号进行预处理。整个预处理电路包含放大电路、比较电路以及整形电路3 个部分,预处理电路如图3 所示。
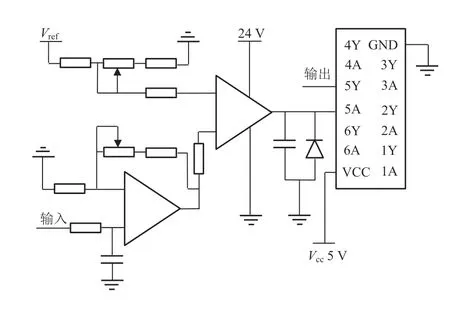
图3 轮速传感器预处理电路
使用示波器测量预处理前后传感器输出信号如图4所示。从测量结果看出:轮速信号经过预处理,原始信号中的杂乱波形转变成清晰、稳定的信号波形。说明预处理电路设计合理,满足信号采集要求。

图4 传感器信号波形图
2.3 轮速信号数据处理、发送电路
根据轮速传感器工作原理,采集连续2 个高电平或低电平的时间差,通过计算获取车轮角速度数据。本文数据处理使用STM 32 芯片,其具有高速处理数据的能力,主频最大168 MHz,能够同时接收多个传感器数据,支持CAN 通讯等优点。数据发送电路如图5 所示。其中:PB13 74 和PB13 73 分别代表STM 32 的管脚号。

图5 数据发送电路
3 轮速信号的修正
通过硬件采集系统得到传感器转过齿圈上的每一个齿的时间,则每个齿的瞬时角速度为

其中:N表示齿圈的齿数。
对于角速度的计算精度主要受到2 个因素影响:1)由于路面颠簸造成时间计数产生误差;2)齿圈由于加工误差造成每个齿的实际角度与理论值2π/N并不相等,而是存在一个误差θ。由于齿圈误差的存在,轮胎真实的振动能量的分布区间被掩盖,因此,齿圈误差必须进行修正。
3.1 轮速信号异常值修正
当汽车在不同路面行驶时,受到路面激励不同。当轮胎突然受到外界较强激励时,如减速带、路面接缝处使轮胎产生异常振动,造成轮速信号的异常跳动,这种现象随机性强并且时常发生。所以,需要对这种异常信号进行识别和处理。
数据的异常点具有突然增大或减小的特点,文献[10]提出了一种轮速异常值识别机制,通过监测角速度的波动能够有效识别异常轮速信号。
识别到异常轮速信号后,需要对异常值进行替换,重新进行赋值。从整个数据采集过程分析,异常值占据总数据量的小部分,当识别到异常值时,采用历史轮速信息值代替异常值,滤波算法如下:
修正前后的轮速信号如图6 所示。利用这种算法有效剔除了异常轮速点,同时最大程度上保留了原始信号信息。

图6 轮速异常值修正前后对比
3.2 齿圈角度修正
假设用理论角度2π/N计算角速度,角速度会呈现一个周期性的波动,对未经修正的角速度做Fourier 变换,进行功率谱分析,如图7 所示。这些谐波的存在,掩盖了轮胎扭转振动下的频率,因此不能忽略齿圈角度的误差,需要对其进行修正。
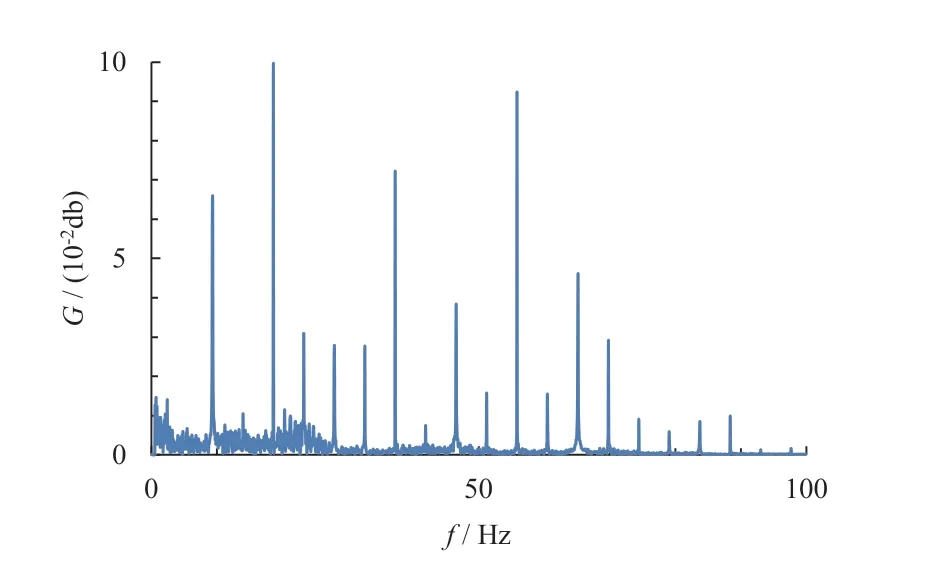
图7 齿圈误差未修正频谱图
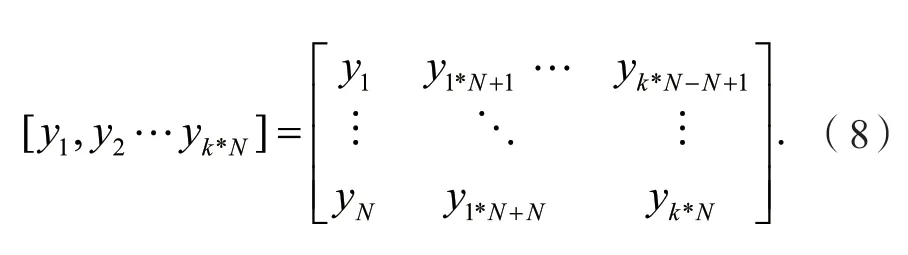
对于某个齿圈来说,轮齿误差量是固定值,齿圈旋转一圈,得到N个轮齿的角度,当轮胎旋转k圈后,将得到的数据按照轮齿个数进行拆分为N个子序列,则每个子序列包含k个数据,修正的基本思想是对每个子序列依次修正。
考虑到收敛速度的问题,一般采用递推最小二乘法(RLS)修正齿圈误差,传统RLS 算法原理如下:
其中:e(n)为误差量;k(n)为增益;p(n)为协方差;w(n)为估计值;λ为遗传因子,一般取0~1 之间。
但是,传统的RLS 算法受到遗传因子的限制,当输入数据出现变化时,收敛值无法有效跟踪。为了解决这一问题,文献[11]提出了一种变遗传因子的RLS算法,根据输入数据的波动,自动调节λ的大小;相对于传统的RLS 算法,收敛速度和跟踪效果都相对较好,公式为:

误差值较小时,遗传因子取值偏向于1。经过变遗传因子的RLS 算法对每个轮齿误差依次进行修正,不同轮齿的误差修正量如图8 所示。
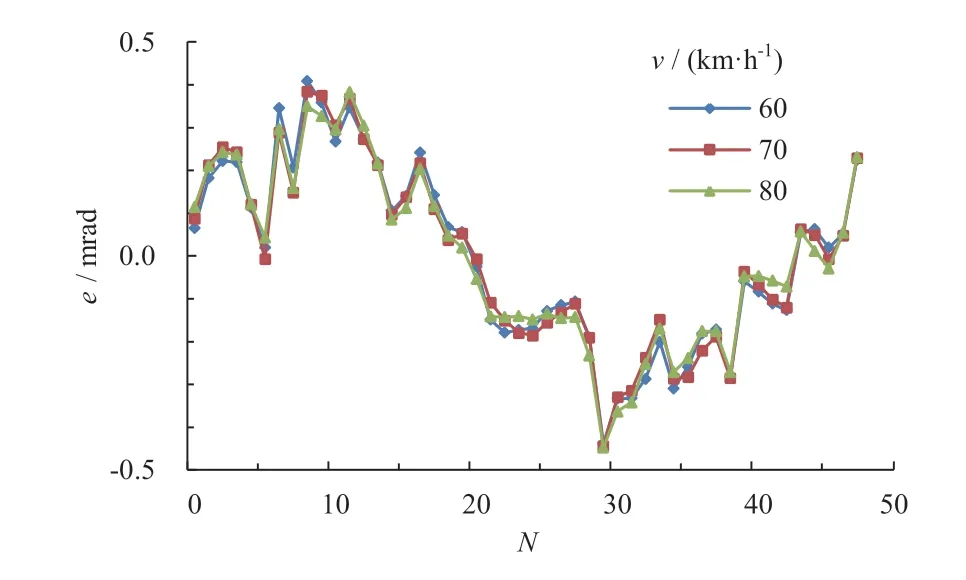
图8 齿圈误差修正量
图8 表明:同一个轮齿修正结果几乎相同,符合误差是固定值的理论,说明此方法满足误差修正要求。故角速度采用下式计算:
3.3 轮速信号均匀化处理
由于式(14)的角速度是时域信号,当车速变化时,轮齿经过传感器的时间相应发生变化,得到的信号是非均匀的,而对轮速信号进行频域分析时,对信号的要求是数据长度固定、间隔均匀;因此进行频域分析前,需要对轮速信号进行均匀化处理。对非均匀信号常见的处理方式是插值,具体包括Lagrange 插值、Newton 插值等方法。通过选择合适的步长,对信号进行均匀化处理。
假设非均匀的轮速信号用函数f(x)表示,区间[a,b]有n+1 个点,且满足a=x0<x1… <xn=b,每个插值点的函数值与f(xi)相等,即:

从而,可得n+1 个坐标点,(x0,y0),(x1,y1),…,(xn,yn),根据坐标点构造出Lagrange 插值多项式:

其中,li(x)称为插值基函数,且满足以下2 个条件:

本文采用多项式插值中最简单的两点插值,即选择n=1,插值多项式表示为

4 扭转振动频率提取
4.1 周期图法
任意取N个连续的样本序列[x1,x2,…,xn],对其进行Fourier 变换,如图9 所示,得到xN(ejω),再计算其功率谱的观测值,用观测值替代真实的功率谱,可表示为

图9 Fourier 变换频谱图

其中,

这种方式直接用快速Fourier 变换计算xN(ω),相对于间接法,节省了计算量。由图9 可知:振动能量主要分布在2 个频率区间,分别对应轮胎的垂直振动频率和扭转振动频率。为方便、准确提取频率,降低其余频率区间的干扰,对频谱图做滤波处理,只保留扭转振动频率所对应的区间。在频率区间内,共振频率明显且符合Gauss 分布。为方便提取固有频率数值,以Gauss 分布的最大值对应下的频率记作轮胎扭转振动的固有频率。
4.2 模型参数法
轮速信号由离散时间点计算得到,属于离散随机系统,对于一个离散系统均可用自回归模型(auto regressive model,AR)模型方程表示,其一般形式可表示为

其中:p为AR 模型的阶数,ak为AR 模型的系数。通过对模型系数估计,即可得到共振频率,而系数和选取的模型阶数有关,为得系数ak,应先确定阶数p。
1)AR 模型阶数的选择。
最终预测误差(final prediction error,FPE)准则常被用来计算AR 模型阶数,其基本思想是根据误差的大小选择合适的阶数,当阶数过低时,模型的曲线将产生欠光滑现象;当阶数过高时,曲线将产生过光滑现象,无论是欠光滑还是过光滑,都将导致误差增大,选择较小误差对应的阶数即为最佳阶数。
设轮速信号对应的最佳阶数为p,将轮速信号带入上式可得
其中:e(n)为均值为0,方差为σ2。
设x(n)的各系数估计值为(1≤i≤p),于是x(n)的估计值为

误差量的方差为

对于AR 模型,应满足

其中,R(i)表示自相关函数的值。
当p从1 开始逐渐增加时,[(n+p)/ (n-p)]随p增加而增大,不断减小,当取得最小值时对应的p为最佳阶数。
2)AR 模型参数估计。
确定阶数p后,对参数和方差进行估计[12],一般采用Yule-Walker 方程求解。具体步骤如下:
步骤1:估计1 阶参数。1 阶Yule-Walker 方程可表示为
参数和方差为:

步骤2:估计p-1 阶参数。p-1 阶Yule-Walker方程可表示为
从1 阶模型进行递推,当p-1 参数已知时,p阶参数和方差为

3)振动频率的提取。
经过计算,得到AR 模型阶数和参数,结合计算的复杂程度,本文采用二阶AR 模型估计共振频率。频率计算公式为[13]

或者使用Matlab 内置的pburg 函数,求取AR 模型的功率谱。AR 模型的功率谱如图10 所示。以幅值最高点对应的频率当作轮胎扭转振动下的固有频率。当轮胎缺气时,其振动频率出现左移,与轮胎振动模型理论相符,且轮胎缺气状态下幅值更高。

图10 AR 模型功率谱图
4.3 车辆测试结果
实验车辆使用的轮胎型号为205/60 R16,数据采集过程中轮胎的标准气压为230 kPa,缺气状态压力为165 kPa,数据采集的轮胎位置为右前轮和左后轮。以空载(2 人)、半载(4 人)以及满载(4 人加后备箱50 kg)划分3 种载荷状态,每位乘客体重应不小于55 kg。当轮胎压力不变时,不同速度和载荷分布和轮胎扭转振动频率关系如图11 所示。

图11 不同速度和载荷分布和轮胎扭转振动频率关系
图11a 表明:当载荷不变时,振动频率随车速增加而降低,降低速率逐渐变缓,并且不同胎压下,对应同一振动频率的速度存在差异,当车辆处于自由驾驶状态时,将造成报警时间过长。
图11b 表明:当速度不变时,随着车载荷的增加,前轮振动频率基本不变,后轮振动频率减小,这是因为载荷增加时,后轮载荷增加量大于前轮。同时缺气状态下,后轮频率随载荷变化更加明显,且空载缺气与满载正常胎压频率值十分接近,导致系统产生误报,并导致降低频率法胎压监测性能。
5 速度和载荷影响解决方案
5.1 车速补偿
频率法胎压监测通过当前状态下轮胎振动频率与标准胎压频率值比较,以此判断轮胎缺气,而标准胎压频率值一般通过驾驶车辆进行标定。由图11a 可知:频率随速度发生改变,若在标定过程中,只进行了部分速度下频率校准,则会出现其余速度下无法有效报警。为了解决上述问题,根据速度对频率进行补偿,将不同速度对应的频率值修正到同一频率,这种方法不用考虑车速,直接对频率进行比较,有效节省了标定和报警时间,具有一定的优势。
本文根据参考速度与当前速度之间的比值对频率进行补偿,即:

其中:fv为当前速度频率,vref为参考车速。采集40~100 km/h 速度区间内轮速数据,利用车速补偿,得到自由驾驶状态下轮胎振动频率如图12 所示。车速补偿后的振动频率更加稳定,降低了速度对振动频率的影响,经过测试自由驾驶状态下4 轮缺气报警时间缩短了5~7 min,更有利于监测轮胎是否缺气。

图12 速度补偿后自由驾驶频率
5.2 载荷识别
当车内载荷增加,尤其是后备箱盛放重物时,后悬架将被压缩,车身俯仰角发生改变,引起纵向加速度传感器信号值改变。基于这种思想,可以利用纵向加速度传感器间接识别车内载荷,加速度传感器工作原理如图13 所示。
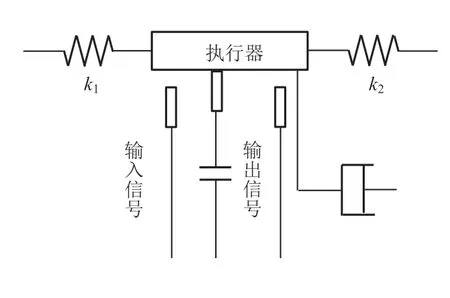
图13 加速度传感器示意图
由于车身的俯仰,执行器在重力的作用下将产生位移,导致传感器输出信号Y 值大小发生改变;因此通过监测输出信号的大小能够实现车内载荷识别。由于车辆在相对水平路面行驶过程中,自身加速度也会引起车身倾角的改变,因此传感器信号值包含2 部分:一部分是由于载荷引起的,另一部分由于车辆自身加速造成。为验证上述推论,首先在空载下对传感器信号值进行标定,排除车辆自身加速度引起的车身倾角改变,因前排位于车辆中间位置,不会对车身倾角产生较大影响,因此标定时选择空载。其次是计算差分加速度值,差分加速度一般可以通过计算速度与时间的比值得到。通过标定,得到空载下差分加速度a与传感器输出信号Y值对应关系如图14 所示,通过拟合函数证明在水平道路上两者呈线性关系。

图14 空载差分加速度与传感器信号拟合关系
不同载荷状态下传感器输出信号Y与拟合公式计算结果y的差值为

将空载、半载与满载状态下加速度数据带入式(37),得到差值结果如图15 所示。由图15 可知,当载荷增加时,差值量与空载相比逐渐增大,且车内载荷越大,差值越大。因此通过判断差值大小能够识别车内载荷状态,并对频率进行补偿,避免因载荷变化造成误报。

图15 不同载荷与加速度差值关系
6 结论
本文通过分析频率法胎压监测原理,设计了轮速传感器信号采集装置,获得轮速传感器相关数据,对齿圈误差进行修正,通过Fourier 变换和参数估计法提取了轮胎扭转振动下的频率,分析40~100 km/h 区间不同速度以及空载、半载、满载3 种载荷状态对轮胎振动频率的影响,并提出车速补偿和载荷识别机制,经验证该方法在车辆自由驾驶状态下4 轮报警时间由原来的12~15 min 缩短至6~8 min,载荷变化无误报,解决了因速度和载荷导致频率法胎压监测系统性能降低的问题。
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17
汽车实用技术(2022年10期)2022-06-09
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
汽车实用技术(2020年24期)2021-01-05
机械设计与制造(2020年4期)2020-04-28
教育教学论坛(2018年39期)2018-09-25
时代汽车(2018年12期)2018-06-18
制造技术与机床(2017年11期)2017-12-18
电气电子教学学报(2014年1期)2014-08-23
汽车技术(2014年1期)2014-07-12
