
智能网联汽车基于分组交替的协同合并策略
2022-10-11 17:01关小魁胡茂彬
汽车安全与节能学报 2022年3期
关小魁,胡茂彬
(中国科学技术大学 工程科学学院,合肥 230026,中国)
国民经济的快速增长对交通运输业提出了更高的要求。高速公路是城市间的快速通道,提供了安全、便捷的出行方式。高速入口匝道的无序并道是造成高速交通拥堵的主要原因之一[1]。交通拥堵降低通行效率,增加事故风险,导致过度燃油消耗,同时给乘客带来不适[2]。因此,亟待提出一种高速入口匝道控制策略,保证车辆有序高效的合并。
匝道流量控制是高速交通控制中一种常用的方法,通过调节入口匝道的车流量来缓解交通拥堵[3]。已有研究表明,匝道流量控制有助于改善高速公路的交通性能,但由于入口匝道的长度较短,车辆在入口匝道处排队可能会对上游道路交通产生干扰[4]。针对此问题,目前已开发出许多控制策略来优化高速入口匝道车辆运动轨迹,如最优控制[5]、反馈控制[6]、自适应巡航控制[7]等。
智能网联汽车(connected and automated vehicles,CAVs)的出现为解决高速入口匝道车辆的合并问题提供了新思路。借助于车—车之间(vehicle-to-vehicle,V2V)、车—路之间(vehicle-to-infrastructure,V2I)的通信,CAVs 能够实时获取相邻车辆的驾驶信息(如:位置、速度、加速度等)并接收中央控制器(central controller)的指令[8]。因此,可以提前为CAVs 分配通过合并区的顺序并规划车辆运动轨迹,实现协同合并,从而减少交通延误和燃油消耗[9]。
协同合并的核心问题是确定车辆的通行顺序[10]。K.Dresner 等[11]提出一种基于预约的控制策略,车辆预约冲突区域时空块,中央控制器根据先进先出(firstin-first-out,FIFO)原则对预约进行仲裁。W.M.Levin等[12]发展和优化了基于预约的策略,提出一个整数规划方法来动态分配车辆的通行顺序。DING Jishiyu 等[13]提出了基于规则的策略,通过调整4 种指定场景下车辆的通行顺序来避免主道和匝道车辆交替合并。然而,FIFO 规则下冲突区域的交通性能提升十分有限,在特定交通场景下(如:高交通负荷)甚至低于传统的交通控制[14]。LI Li 等[15]采用树状结构表示通行顺序的求解空间,并采用剪枝技术来提高计算效率。此外,学者们利用经典算法来优化车辆的通行顺序,如Monte-Carlo 树搜索算法[16]、动态规划[17]等。通常,这些方法需要花费大量的计算时间获得车辆的通行顺序,很难满足交通系统的实时性要求[14]。
综上,已有的协同合并策略很难兼顾计算效率和交通性能。针对此问题,本文设计通行顺序调整算法,重新规划车辆运动规则,提出基于分组交替的协同合并策略,旨在保持计算效率的同时提高交通性能,减少燃油消耗。新策略能够适用于不同的交通需求场景,实时分配和优化车辆通行顺序,帮助车辆安全高效的合并。
1 问题描述
如图1 所示,考虑一个主道和匝道均为单车道的直接式高速入口匝道交通场景。研究区域设有中央控制器,通过V2I 通信获取附近车辆的驾驶信息,并为车辆分配和调整通行顺序。红色区域为合并区,主道和匝道车辆竞争此处道路通行权,匝道车辆在此并入主道。每个方向均设有控制区,控制区内车辆实时与其他车辆(包括不同方向的车辆)和中央控制器共享驾驶信息,相互协调。
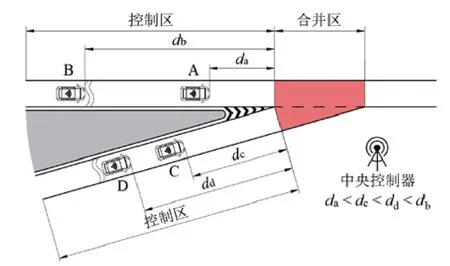
图1 车辆协同合并示意图
在高速入口匝道,为避免发生追尾和横向碰撞,主道和匝道车辆均需满足安全要求。本文设定最小安全间隙来保证车辆的行驶安全。
对于相同方向上连续行驶的2 辆智能网联汽车(CAVs)i和i-1,如图1 中的CAVD和CAVC,要求它们之间的间隙大于安全阈值dsafe1:

其中:xi和xi-1分别为CAVi和前车CAVi-1的位置;lcav为CAV 的长度。
对于冲突方向上连续行驶的2 辆CAVsi和j,如图1 中的CAVB和CAVD,到达合并区时要求它们之间的间隙大于安全阈值dsafe2,即:

或者

式(2)和(3)分别对应CAVi先到达合并区和CAVj先到达合并区2 种情况。相比车辆跟随相同方向前车的运动,冲突方向车辆的交替合并过程更加复杂,需要更长的安全间隙[1]。因此,冲突方向车辆之间的安全阈值大于相同方向车辆之间的安全阈值,即dsafe2>dsafe1。
此外,为方便研究,做出以下假设:
1)通讯范围覆盖整个高速入口匝道,通信性能良好;
2)所有的车辆均为智能网联汽车,可以严格控制车辆速度和行驶轨迹;
3)中央控制器分配和优化控制区车辆的通行顺序,储存和传输所有车辆的驾驶信息。
2 协同合并模型建立
本文在智能网联汽车环境下,建立基于分组交替的高速入口匝道协同合并模型。首先设计通行顺序调整算法,优化车辆通过合并区的顺序,然后根据通行顺序规划每辆车的运动轨迹,模拟车辆合并过程,最后引入微观油耗模型评估不同策略的油耗。
2.1 通行顺序调整
研究表明,协同合并策略的性能主要由车辆的通行顺序决定[10]。一个简单的通行顺序分配方案是根据FIFO 规则。此规则下,车辆的通行顺序由车辆到合并区的距离或车辆进入控制区的顺序直接确定。对于图1所示场景,根据FIFO 规则,CAVA,CAVC,CAVD和CAVB将依次通过合并区。用字符串ACDB 来表示这种通行顺序。字符串左侧车辆的优先级更高,先通过合并区。如果车辆间存在潜在碰撞,低优先级的车辆必须调整行驶轨迹,来满足安全要求。
车辆的合并过程比连续行驶更加复杂,并且主道和匝道车辆交替合并需要更多的安全间隙(dsafe2>dsafe1),合并效率更低。如果只有单方向的车辆连续驶入合并区,此时不存在任何横向冲突,通行效率显然最高。相反,主道和匝道车辆反复交替地驶入合并区,此时每辆车与前后2 辆车都存在横向冲突,通行效率显然最低。因此,基于文献 [13] 中让某一方向的几辆车先连续通过合并区,然后另一方向的一组车再通过,避免交替合并的思想,本文设计基于分组交替的通行顺序调整算法(见算法1)来优化车辆通行顺序,该算法在很少的计算花费下能够显著减少总通行时间和油耗。文献 [13] 针对特定的4 种情况调整车辆的通行顺序,而本文的算法更具有普适性,此外本文的通行顺序调整规则和生成的通行顺序也不同于文献 [13](对于图1 场景,本文生成的通行顺序为ABCD,文献 [13] 为CDAB)。
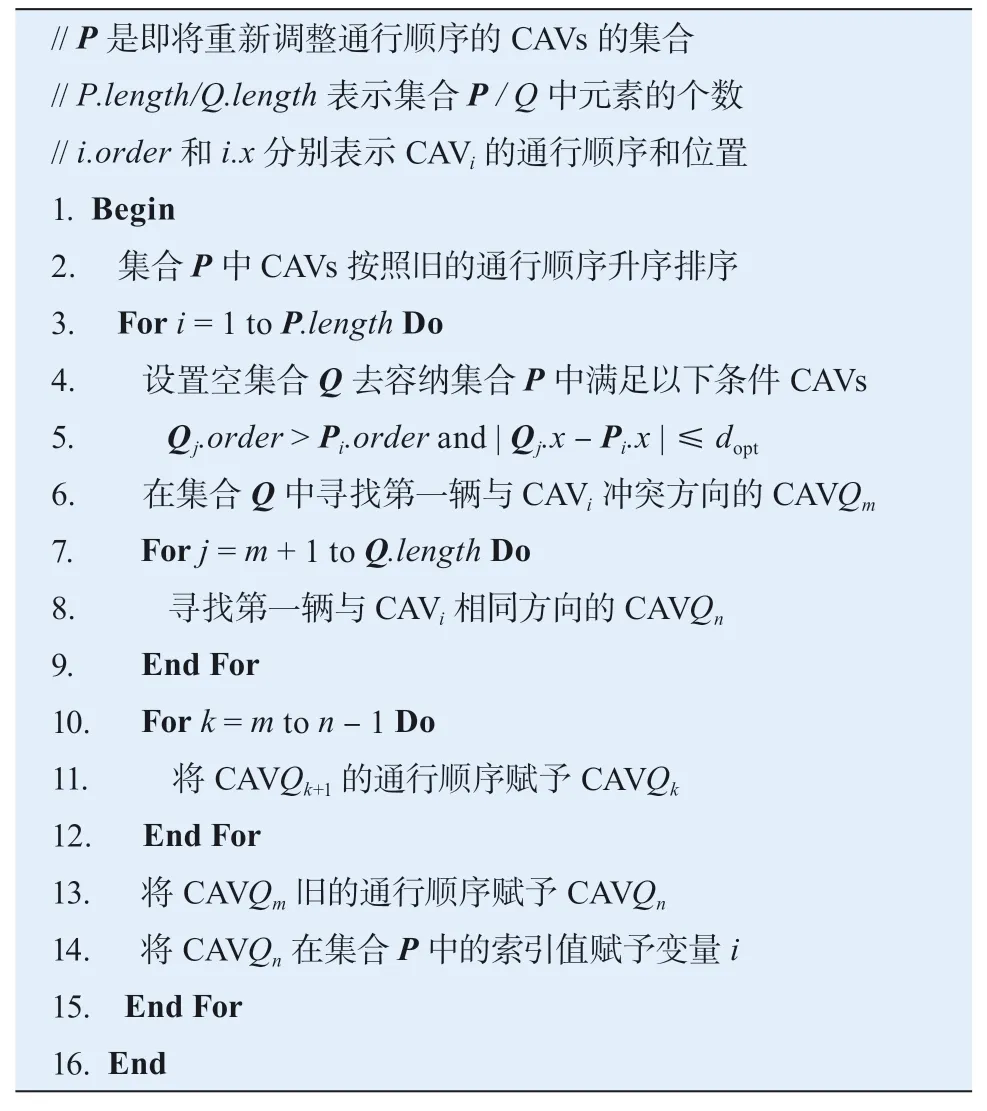
算法1 分组交替的通行顺序调整算法
对于图1 所示的合并场景,FIFO 规则下所产生的通行顺序为ACDB,CAVA通行顺序的值最小。考虑到冲突方向相距很远的2 辆车不会在合并区发生横向碰撞,因此设置通行顺序调整的最大阈值dopt。
调整后,车辆的通行顺序为ABCD。即,同一方向的CAVA和CAVB先连续通过合并区,另一方向的CAVC和CAVD再通过合并区。此时,头车(最先通过合并区的车辆)和尾车(最后通过合并区的车辆)的最小安全阈值2dsafe1+dsafe2小于通行顺序调整前的最小安全阈值dsafe1+2dsafe2。因此,理论上调整后的通行顺序能够提高合并效率。
2.2 车辆运动规划
本文使用细化的元胞自动机模型来模拟车辆的运动。根据智能网联汽车和协同合并的特点,改进了经典的Nagel-Schreckenberg(NaSch)模型[18]。模型中,道路被划分成一系列离散的元胞,每个元胞长度为1 m,每个时间步长为1 s,每辆智能网联汽车占据5 个元胞。
在高速入口匝道,车辆需要与相同方向的前车保持安全间隙,避免追尾,同时需要实时与冲突方向的前车进行协调,保证安全合并。因此车辆的更新规则如下:
1)加速:

其中:vi(t)为CAVi在t时间步的速度;amax和vmax分别为车辆的最大加速度和最大速度。
2)减速:
CAVi的速度同时受相同方向前车CAVi-1和冲突方向前车CAVj的影响。因此,CAVi与CAVi-1和CAVj之间的有效间隙为:

此外,考虑最大减速度amin和最小速度vmin的约束,因此CAVi下一时间步的速度为:

3)位置更新:

通常,NaSch 模型中的随机慢化步反映司机的驾驶行为差异,而本模型建立在智能网联汽车环境下,所以不考虑车辆随机慢化。模拟中优先级高的车辆的驾驶信息先更新。对于图1 所示场景,假设车辆的通行顺序为ABCD,则头车CAVA始终以尽可能大的速度行驶,CAVB的速度受到相同方向前车CAVA的影响,CAVC的速度受到冲突方向前车CAVB的影响,CAVD的速度同时受到相同方向前车CAVC和冲突方向前车CAVB的影响。
2.3 油耗模型
尽管汽车厂商已经开发出混合动力和纯电动汽车,但由于成本和实用性等方面的限制,它们尚未普及。因此,本文针对燃油型智能网联汽车建立油耗模型,并采用Virginia Tech microscopic(VT-Micro)模型[19-20]评估不同策略对车辆油耗的影响。VT-Micro 模型基于车辆的瞬时速度和加速度计算燃油消耗,因此可以方便地与车辆运动模型相结合。VT-Micro 模型可以表示为:

其中:MOEe为CAVn的燃油消耗速率,单位是L/s;vn为CAVn的速度,单位是km/h;i=0,1,2,3 为速度的指数;an为CAVn的加速度,单位是km·h-1·s-1;j=0,1,2,3 为加速度的指数;Ki,j和K’i,j分别正加速度和负加速度下燃油消耗的回归系数,其值见表1[21]。

表1 燃油消耗的回归系数
3 模拟结果与讨论
为了验证基于分组交替的协同合并(分组交替)策略的有效性,进行了数值模拟。如图1 所示,考虑一个典型的高速入口匝道合并场景。车辆连续到达高速入口匝道,平均车头时距为Δt。车辆以最小速度vmin驶入控制区。由于仿真模拟具有随机性,模拟中重复运行100 次,统计策略性能平均值。除特别说明外,主道和匝道产生的车辆数目和平均车头时距均相同。
本文将分组交替策略与无控制自然合流(无控制)策略、FIFO 策略进行比较。无控制策略下,匝道车辆需要避让主道车辆,在合并区入口满足安全条件时(与主道前、后车间隙均大于dsafe2),匝道车辆并入主道。FIFO 策略下,先进入控制区的车辆先通过合并区。
为了准确比较各策略的性能,在控制区入口处采用了点队列模型[10]。点队列模型假设车辆在到达高速入口匝道边界前处于自由流状态。如果前方车辆没有留下足够的空间,后续到达的车辆会在控制区外排队,形成点队列。相反,随着前方车辆向前运动,留出足够的空间,点队列中的头车进入控制区。主道和匝道均设有独立的点队列。
所有模拟实验均使用 C++语言在台式计算机(处理器为Inter i5-9400F,处理器频率2.90 GHz,运行内存8 GB)上的 Visual Studio 平台上实现。模拟中的主要参数见表2。

表2 模拟参数
3.1 通行效率比较
对比不同策略下,车辆通过高速入口匝道的效率,模拟中,n辆车(n∈[1,30])随机到达高速入口匝道,采用3 种不同的策略(无控制、先进先出和分组交替策略)解决车辆的合并问题,并比较模拟中所获得的数据。
如图2 所示,相比于无控制和先进先出策略,分组交替策略可以显著降低车辆总通行时间(ttotal),且随着交通负荷的增大,通行效率提升愈加明显。其中,无控制策略因无法有效利用控制区的道路资源,通行时间最长;先进先出策略借助于V2V、V2I 通信提高了通行效率;分组交替策略通过调整车辆的通行顺序,使整体受益,通行时间最短。因此,分组交替策略能够有效提升高速入口匝道的车辆合并效率。

图2 不同交通负荷下的通行效率比较
3.2 时空轨迹
车辆时空轨迹可以帮助理解车辆在高速入口匝道的运动,并检测冲突。本文截取了分组交替策略下,主道和匝道上所有车辆的运动轨迹。模拟中产生30 辆车,主道和匝道各15 辆。
如图3 所示,纵轴表示车辆所在位置(x),模拟中相同方向车辆之间的间隙均大于dsafe1,在合并区,冲突方向车辆之间的间隙均大于dsafe2,因此,主道和匝道的所有车辆都可以安全通过高速入口匝道。分组交替策略下,车辆分组连续通过合并区,由于车辆通行顺序的调整,先进入控制区的车辆不一定先通过合并区。此外,车辆行驶过程中均未出现停车现象,存在潜在横向碰撞的车辆进入控制区后,先以较小的速度行驶,满足安全条件后,均能以最大速度通过合并区。因此,分组交替策略能够保证行车安全,避免车辆走走停停。

图3 分组交替策略下的车辆运动轨迹
3.3 计算时间
协同合并策略的计算性能关系到此策略能否真正应用于实际交通系统。为了更加精确的统计车辆从产生到离开系统的时间,记录模拟从开始至结束所消耗的中央处理器(central processing unit,CPU)时间,计算每辆车的平均消耗值。进入系统时车辆的平均车头时距Δt=4 s。
如图4 所示,3 种策略均能在很短的计算时间内解决高速入口匝道的车辆合并问题,且车均计算时间(tmean)均随着交通负荷的增加而增长,这是因为潜在冲突变多,为满足安全要求,车辆需要更多的时间和空间调整行驶轨迹。虽然分组交替策略车均计算时间大约是无控制和先进先出策略的2 倍,但平均计算时间在0.1 ms 内。因此,新策略满足实时性要求,能够应用于实际交通系统。

图4 不同交通负荷下的车均计算时间比较
3.4 油耗性能对比
为了更明显地比较不同策略下车辆的油耗,将控制区长度拓展为lc=1 000 m。车辆的油耗受加速度影响较大,而元胞自动机模型对车辆的运动描述比较粗略,因此将车辆最大加速度和最大减速度分别设为amax=2 m/s2和amin=-2 m/s2,车辆最大速度和最小速度分别设为vmax=25 m/s 和vmin=15 m/s,通行顺序调整的最大阈值设为45 m。
如图5 所示,分组交替策略下车均油耗最低且比较平稳。当交通负荷非常小时,新策略的平均油耗(Qmean)略高于先进先出策略;随着车辆数目的增加,先进先出策略的平均油耗迅速增加,超过分组交替策略。此外,无控制策略下由于匝道车辆长时间排队等待并道时机,车均油耗始终保持较高的增长速度。结果表明,分组交替策略具有节约燃油消耗的效果。
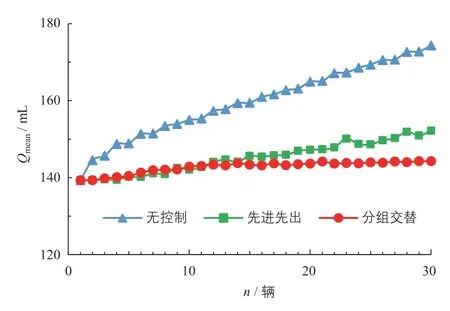
图5 不同交通负荷下的油耗比较
3.5 不同平均车头时距下策略性能比较
比较3 种策略在不同平均车头时距下的吞吐量、平均延迟、总油耗和模拟时间。模拟10 min 高速入口匝道合并过程,为公平比较,3 种策略均未限制最小速度和最大减速度,模拟结果如表3 所示。表3 中Δtm和Δtr分别表示主道和匝道的平均车头时距。

表3 3 种策略比较结果
在不同平均车头时距下,分组交替策略均展现出更高的吞吐量、更低的平均延迟和总油耗。3 种策略均能够在0.1 s 内完成10 min 的交通模拟。无控制策略中,当匝道平均车头时距较大时,交通性能最好,这是因为需要排队等待并道车辆(匝道车辆)减少。但是,当匝道平均车头时距较小时,无控制策略的性能急剧下降。其中,当主道和匝道平均车头时距相等时,相比于无控制和先进先出策略,分组交替策略的吞吐量分别提升3.19%和27.34%,平均延迟分别下降18.60%和76.57%,总油耗分别减少35.48%和14.41%。结果表明:分组交替策略能够适用于不同的交通流场景,其中在对称交通流场景下因更多车辆获得通行顺序调整,性能表现更佳。
4 结论
针对高速入口匝道交通拥堵,油耗过高等问题,本文提出基于分组交替的协同合并策略。新策略主要包含2 个步骤:通行顺序调整和运动轨迹规划。基于先进先出规则,设计了通行顺序调整算法,新算法虽然不能保证获得全局最优的通行顺序,但在极少的计算花费下显著提升了车辆合并效率并减少燃油消耗。结合智能网联汽车和协同驾驶的特点,改进了经典的NaSch 模型,避免车辆走走停停,解决车辆之间的冲突问题。
仿真模拟从交通性能、油耗、计算成本和安全性等方面量化了新策略的有效性。结果表明,在不同交通流场景下,新策略均显著优于2 种经典的高速入口匝道控制策略(无控制和先进先出策略)。其中,模拟中产生30 辆车时,新策略的总通行时间分别减少36.09%和24.45%,车均油耗分别减少17.25%和5.18%。此外,新策略能够保证车辆行驶安全,维持计算效率,满足实时性要求。新策略适用性强,有望在未来智能交通中解决高速入口匝道的交通拥堵问题。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
遗传(2022年9期)2022-10-10
海洋通报(2020年5期)2021-01-14
中国交通信息化(2020年4期)2021-01-14
中国交通信息化(2019年2期)2019-03-25
山西建筑(2019年2期)2019-01-15
中国交通信息化(2018年11期)2018-03-01
中国公路(2017年18期)2018-01-23
车迷(2017年12期)2018-01-18
车迷(2015年8期)2015-03-20
