
新能源汽车锂离子电池组SOC-SOP 联合估计算法
2022-10-11 17:02江迪生张扬军钱煜平
汽车安全与节能学报 2022年3期
谢 翌,江迪生,张扬军,李 伟,杨 瑞,钱煜平
(1.重庆大学 机械与运载工程学院,重庆 400044,中国;2.清华大学,汽车安全与节能国家重点实验室,北京100084,中国;3.重庆大学 能源与动力工程学院,重庆 400044,中国)
随着环境与能源问题逐渐加剧,交通领域内的节能减排已经成为不可避免的问题。发展新能源汽车作为解决这一问题的有效措施之一获得了国家的大力支持。动力电池作为新能源汽车的核心零部件,其工作状态直接影响整车的性能。故需要对其状态进行估计。当前电池管理系统(battery management system,BMS)的状态估计算法多以荷电状态(state of charge,SOC)估计为主,但涉及到电池组的多状态联合估计的较少。为了进一步延长锂离子电池的寿命,提高新能源汽车的使用性能,需要对电池的荷电状态—功率状态(state of charge-state of power,SOC-SOP)进行联合估计。
目前常见的SOC 估计方法主要分为4 类,即:可测参数表征法[1]、安时积分法[2]、机器学习法[3]和模型法[4]。可测参数法通常根据开路电压(open circuit voltage,OCV)与SOC 的关系估计电池的SOC。在实际中,其往往同在线辨识结合来获得更准确的SOC。安时积分法是通过SOC 定义直接对其进行计算。尽管简单,但该方法对于初始荷电状态和电流采集精度要求很高。机器学习法利用离线实验数据建立电流、端电压、温度与电池荷电状态的映射关系,以此来估计电池SOC。模型法通过建立电池模型,结合各类滤波算法对SOC 进行预测。这种方法是目前广泛被关注和研究的方法。电池的峰值功率状态(state of power,SOP)受SOC、可用容量、端电压、电流、温度等多方面制约,因此,SOC 与SOP 是相关耦合的。SOP 的估计方法有基于混合动力脉冲能力特性(hybrid pulse power characteristic,HPPC)实验标定[5]以及基于多约束的方法[6]。前者的精度取决于测试误差,而后者则是通过考虑动力电池多方面影响因素来保障估计精度。由于动力电池特征参数彼此关联,故多数研究集中于状态参数的联合估计上[7-10],流行的解决方法有基于双Kalman 滤波算法的电池状态和参数同步估计[7]、基于温度补偿的自适应扩展Kalman 滤波(adaptive extended Kalman filter with a forgetting factor,AEKF-FF)的 多状态估计[8]、基于粒子滤波与容积Kalman 滤波算法的模型参数与SOC 联合估计[9]、基于扩展Kalman 滤波与滚动预测窗口的多状态估计[10]等。但以上研究均是基于电池单体提出,没有针对电池组。鉴于此,本研究建立了锂离子电池组的SOC-SOP 双状态联合估计算法,用以实现锂离子电池组状态估计。
本文基于电池组的有效电气模型,使用自适应扩展Kalman 滤波算法(AEKF)用于实现电池SOC 估计,结合SOC 估计值实现基于SOC 约束以及电压约束的多约束的持续SOP 联合估计,并通过采集锂离子电池组在模拟循环工况下的电流、电压等数据信息,验证算法对于锂离子电池组状态估计的鲁棒性与精确性。
1 电池组建模
1.1 电池组电模型
由于先并后串的电池拓扑结构在电池组连接的可靠性及电池电压一致性方面上优于先串后并。新能源汽车的动力电池一般采用多个电芯并联成电池模块以满足其容量要求,再将多个电池模块串联满足其电压要求[11]。实验用锂离子电池组由12 个容量为50 Ah 的NCM 三元锂离子电池采用3 并4 串(3P4S)的方式连接而成,结构如图1 所示。其中电池单体型号为中航锂电L148N50B,充电截止电压为4.25 V,放电截止电压为2.75 V。

图1 锂离子电池组结构
根据电池单体在组内的连接特点,可将电池组简化为串联的4 个3P 模组串联而成。由于并联电芯具有相同的端电压,故本文将每个3P 模组直接简化为150 Ah 大单体。整个电池包的简化结构如图2 所示。针对其他动力电池类型和不同数量单体成组的动力电池组同样可以采用该简化方式,如m并n串(mPnS)方式连接的电池组可以简化为n个mP 模组串联而成。

图2 电池包的简化
本文采用一阶阻容(resistance-capacitance,RC)等效电路模型对3P 模组的电气特性进行建模,其模型如图3 所示。

图3 3P 模组的等效电路模型
根据图3,模型表达式为

其中,Ut为电池端电压,UOCV为开路电压,i为电流,Ro为欧姆内阻,U1为极化电压;t为电池放电时间。
电池开路电压与SOC 的关系可通过混合动力脉冲能力特性(hybrid pulse power characteristic,HPPC)实验(详情见1.2 节)测得。将SOC 与UOCV的关系通过多项式响应面模型进行拟合,其结果如式(2)所示。

其中,SOC(t)为在t时刻时动力电池SOC 估计值。多项式响应面模型R2值为0.9993,这表明该模型能够精确描述开路电压与电池SOC 的关系。一阶RC 模型中,
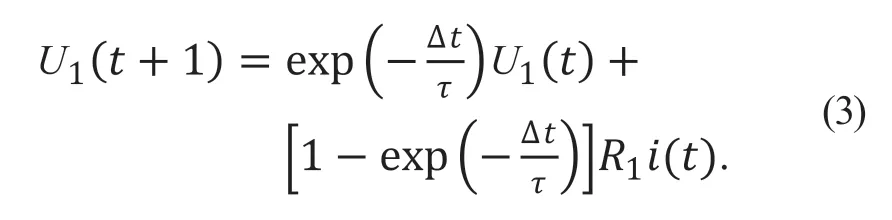
其中:Δt为采样间隔,取值为1 s;τ=R1C1为时间常数,R1为极化内阻,C1为极化电容。
1.2 HPPC 实验测试
采用新威BTS60V600A 电池测试系统对锂离子电池组进行HPPC 测试,环境温度为20℃,SOC 设为0.1、0.3、0.5、0.7 以及0.9。HPPC 测试过程如图4 所示,对电池施加脉冲电流,端电压会产生一系列的响应。

图4 HPPC 测试过程
根据端电压变化,可以通过式(4)—式(6)[12]对各个并联子模组在不同SOC 条件下的欧姆内阻Ro、极化内阻R1和极化电容C1进行参数识别。
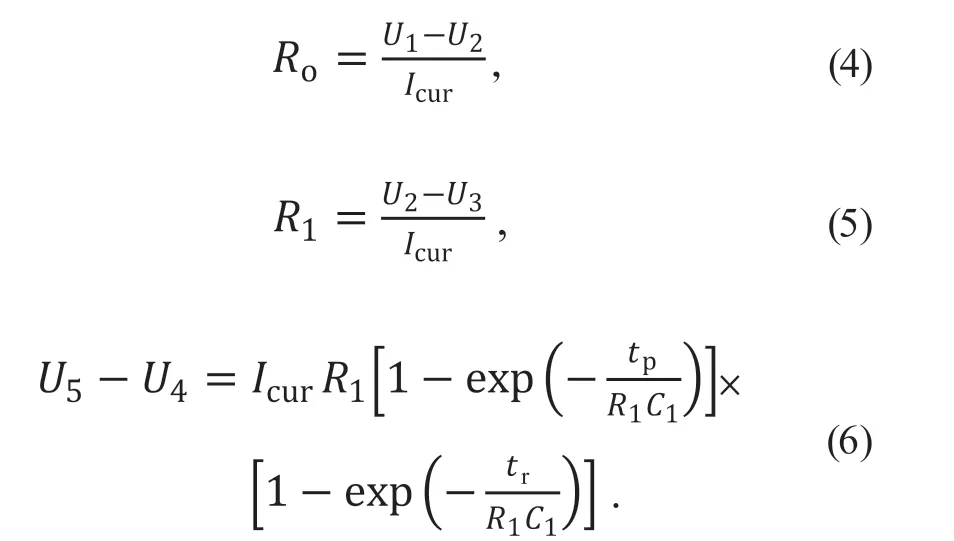
式(4)—式(6)中,Icur为脉冲电流,tp为脉冲电流持续时间,实验设置为10 s,tr为电压回复时间周期。
1.3 并联电池子模组电模型参数
并联电池子模组的欧姆内阻、极化内阻以及极化电容随SOC 的变化规律如图5 所示。

图5 并联电池子模组(3 P 模组)的电气参数随SOC 变化规律
由于4 个并联模组的内阻与极化电容在相同SOC条件下的差别较小,因此采用相同SOC下并联模组的平均内阻与平均极化电容作为并联模组一阶RC 模型在该条件下的内阻与极化电容。当SOC 在0.3~0.9 间变化时,内阻与极化电容变化较小,故本文采用SOC 在0.3~0.9 间的平均值作为并联模组一阶RC 模型的电气参数,其计算式为:

其中:Ro、R1、C1分别为式(1)和式(3)中的Ohm 内阻、极化内阻和极化电容,Roij、R1ij、C1ij分别为锂离子电池组中第i个并联模组在第j个SOC下的Ohm 内阻、极化电阻和极化电容。并联模组的一阶RC 模型电气参数计算结果如下:

在电池组电模型构建过程中,考虑算法实际应用场景,为提高运行效率和节约芯片算力资源,极大简化了电模型参数。在芯片算力允许的基础上,可以通过建立电模型参数与SOC 的拟合曲线提高模型精度和拓宽模型的SOC 适用范围。
2 SOC-SOP 联合估计算法
电池组SOC-SOP 耦合估计算法的流程及输入及输出值如图6 所示。算法框架包括SOC 和SOP 2 个估计模型,其中SOC 估计模块为其他状态模块的基础,估计的SOC 值为SOP 模块的输入。
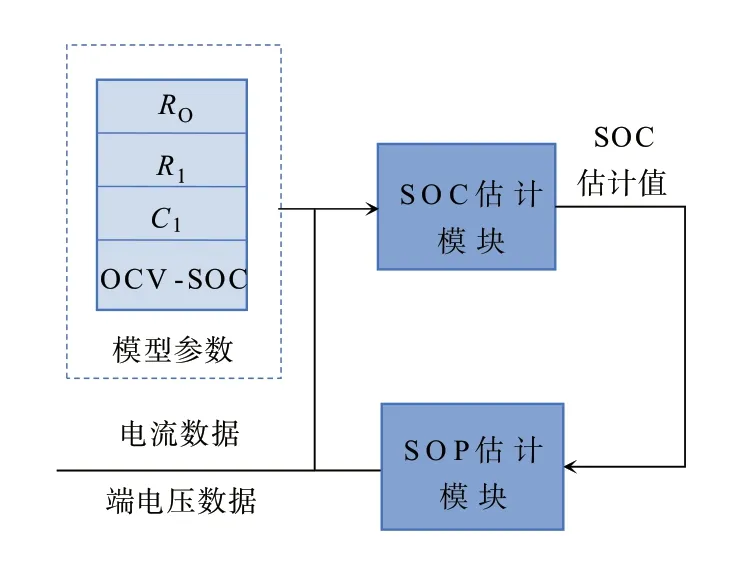
图6 电池组SOC-SOP 耦合估计算法的流程及输入及输出
2.1 SOC 估计
对于电池组的SOC 估计,本文将基于自适应扩展Kalman 滤波算法(AEKF)进行,算法流程如图7 所示。

图7 SOC 估计模块
在算法开始时,先对AEKF 滤波器的参数x0、R0、P0以及Q0进行初始化,其中R为测量噪声输入的协方差矩阵,P为状态误差协方差矩阵,Q为状态噪声输入的协方差矩阵。线性化后,一阶RC 模型的先验估计公式为:

其中:x=[SOC,Ut],u=i,y=Ut,矩阵为k时刻电池SOC 和模型极化电压的先验估计值,为(k-1)时刻电池SOC 与一阶RC 模型极化电压的后验估计值,uk为k时刻电池组的电流测试值,A,B,C以及D为相关的常数矩阵或常数值。其中:
其中,ηi为充放电效率、Cmax为该条件下电池最大可用容量。

向前推算状态误差协方差矩阵为:

由式(13)计算Kalman 增益:

其中:Kk表示k时刻时Kalman 增益矩阵,Rk-1为(k-1)时刻时测量噪声输入的协方差矩阵。

根据式(15)中新息ek完成对当前噪声协方差矩阵的主动调节,其自适应调节算法如式(16)所示。

其中:Hk为k时刻的方差-协方差矩阵,M为移动窗口的大小,其大小表征了对新息的历史信息的利用程度。由于过大的移动窗口会导致算法运行速度下降,所以在考虑估计精度及运算复杂度后,将M设置为2。
通过上述方程可以得到电池组中各个并行模组的SOC 估计预测值,结合各个模组的最大可用容量,可通过下式完成电池组的SOC 估计。

其中:SOCAEKF(k) 为k时刻的电池组的SOC 估计值,SOCmod,min(k)与SOCmod,max(k)为k时刻4 个模组的SOC估计值中的最小值、最大值,Cmax,min与Cmax,max为4 个模组的最大可用容量中的最小值、最大值。式(17)分子表征电池组的可充容量,分母表征电池组可放容量与可充容量之和,通过两者比值表征电池组SOC 估计值。
2.2 SOP 估计
将基于SOC 约束以及电压约束的多约束来实现对SOP 的持续估计,SOP 的估计过程如图8 所示。

图8 SOP 估计模块
为估计电池充、放电峰值功率,应先完成电池充放、电峰值电流的估计。因为并联电池子模组的电气参数不随电池电流的变化而发生改变,故将以10 s 为脉冲电流的持续时间l来估计电池SOP。在SOP 估计中,电流在脉冲持续时间内电池恒定,故式(9)、式(10)可改写为:

由于并联电池子模组的电气参数恒定,故系统的状态式(18)还可以变化为

将式(19)代入式(3),可将极化电压预测模型改写为式 (21)。将开路电池计算式(2)以及式(21)带入式(3)中,可得到电池端电压的预测公式为式(22)。对式(22)进行求解,可得基于电压约束的充放电峰值电流,其表达式如(23)所示。考虑到电池截止电压的影响,电池在持续时间l内的峰值电流可由式(24)计算。

式(24)中,Umin与Ut,max为设置的电池放电和充电截止电压。结合SOC 的估计值以及截止SOC 的限制,可得到电池在持续时间l内的持续峰值电流,其表达式为:

式(25)中,上标dis 为放电,cha为充电,SOCmin与SOCmax为设置的电池放电和充电截止SOC。电池充、放电峰值电流除了受截止SOC 影响外,还要考虑电池工作截止电压的限制。故持续时间内l的持续峰值电流估计值:

在获得4 个模组的峰值电流估计值后,可基于式(21)计算各并联子模组的端电压,并估计电池组的SOP,其计算公式为

式(27) 中,SOPdis(k+l) 与SOPcha(k+l)为电池组在持续时间内的充放电SOP 估计值,与为并联子模组中充放电持续电流估计值中的最大值和最小值。
上述SOC-SOP 双状态联合估计算法可通过更新并联子模组个数推广应用于采用相同先并后串的电池拓扑结构的动力电池组,具有一定的普适性。
3 SOC 估计结果及验证
3.1 模拟循环工况实验
在算法验证上,本文将基于循环工况测量电池端电压、电流等相关参数,并根据这些数据完成电池的状态参数估计。图9a 为整个实验流程。电池电流根据整车行驶工况计算得到,本文采用美国环保署(Environmental Protection Agency,EPA)工况标准中的高速公路燃料经济性试验(highway fuel economy test,HWFET) 工况,计算电池充放电电流。HWFET 工况是高速公路行驶工况,总行程16.45 km,总历时765 s,其间汽车平均行驶速度为77.7 km/h,该工况对应车速如图9b 所示。测试中,电流通过电池充放电仪提供(NEWARE BTS-4000 60V 600A),此外充放电仪还负责电池组总电流以及总电压的采集,对于电池组中的子并联组,其端电压采用安捷伦数据采集仪(型号为34972A)进行采集。

图9 电池组的实验测试
3.2 SOC 估计结果
3.2.1 算法有效性与鲁棒性验证
HWFET 工况下,电池组总端电压以及电流如图10所示。
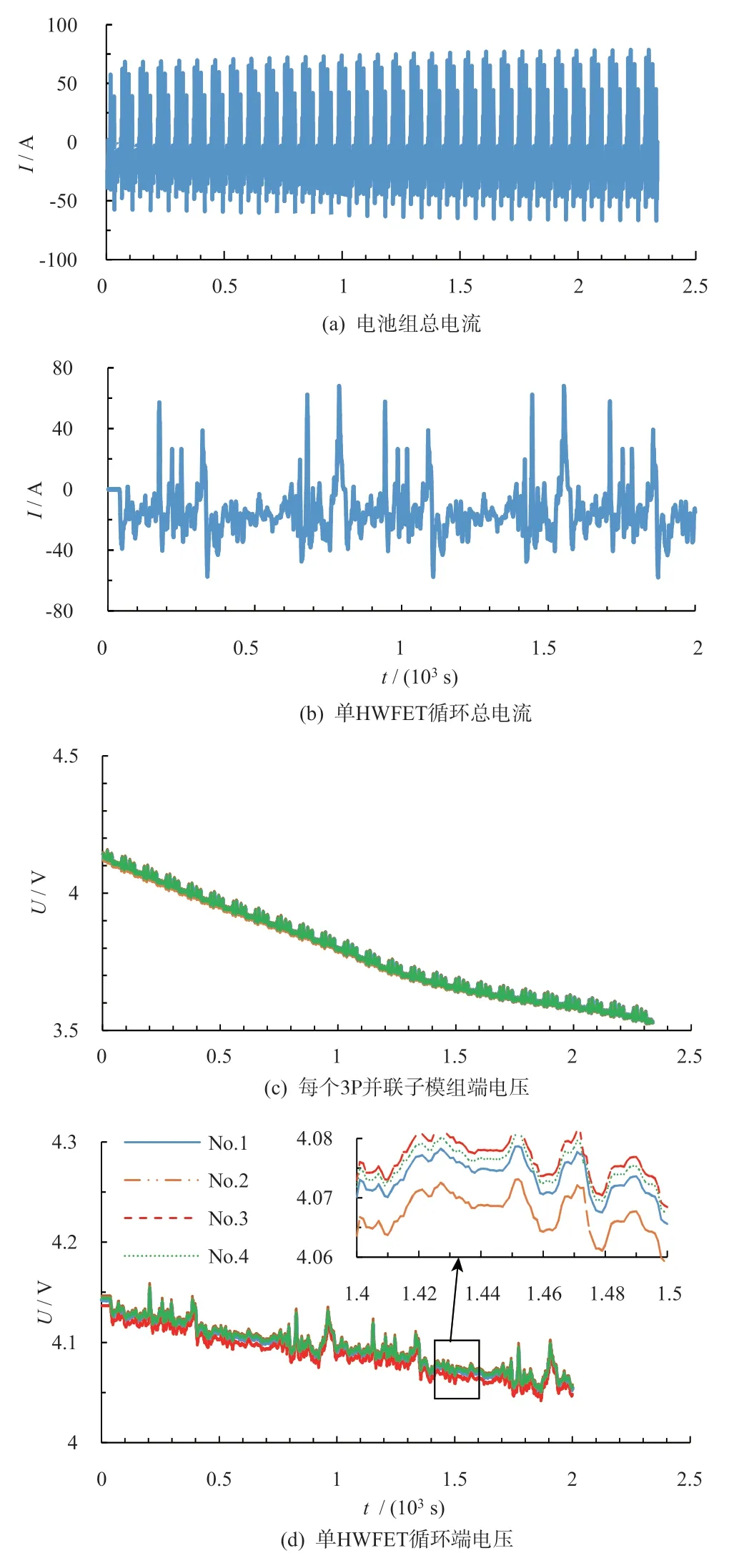
图10 电池组电流及端电压
为验证本文所采用的AEKF 算法在电池组SOC 估计中的有效性与鲁棒性,本文在AEKF 中设置了错误的SOC 初始值,并基于设定与实验参考值进行了对比。此外,本文在对比中加入了EKF。对于测试中,电池组的实际SOC 为1,设置的错误值(SOC0)分别为0.3 和0.8。图11为AEKF 和EKF 在不同错误初始荷电状态(SOC0)下的SOC 估计结果。由图可知,本文所采用的AEKF算法相较于传统的EKF 算法精度更高。在相同错误初始SOC下,EKF 的SOC 估计值曲线抖动严重,估计值后期明显偏离实验所得参考SOC。AEKF 所估计的SOC曲线在整个实验阶段内都较平滑,且更贴合参考SOC 曲线。表1为AEKF 和EKF 算法的SOC 估计误差,其中MAE 为整个SOC 估计值的平均绝对误差,RMSE 整个SOC 估计值的平均相对误差。由表可知,本文所采用的AEKF 算法在估计并联电池组SOC 时具有更高的精度,且初始SOC 对估计误差影响更小,具备更好的鲁棒性。

表1 SOC 估计结果
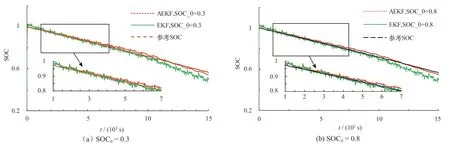
图11 不同错误初始SOC 下的估计结果
3.2.2 电池组SOC 估计算法的精度
在证明本文采用的SOC 估计算法的有效性和鲁棒性后,将该算法应用于完成完整的循环工况中,估计结果如图12 所示。

图12 电池组SOC 和端电压估计值
电池组端电压估计的误差不超过0.2 V,在SOC估计值收敛后的最大绝对误差为2.749%,均方根误差为1.719%。由此可知,SOC-SOP 联合估计算法中的SOC 估计模块具有较高的估计精度。
3.3 SOP 估计结果
3.3.1 JEVS 实验
本文基于日本电动汽车标准 (Japan electric vehicle standard,JEVS)功率测试方法[13]来获得电池模组的充、放电峰值功率,并将其用于验证SOC-SOP 估计算法中电池组SOP 估计算法的可行性。其基本思路是在同一SOC下施加递增的脉冲电流,脉冲电流的时间间隔一致,本文取为10 s。通过一系列电流、电压测试数据进行拟合,可得该SOC下对应电池充电或放电时达到截止电压前的峰值电流。本文中JEVS 功率测试方法将基于线性拟合电压U3平均值与电流I的关系(如图4 所示),插值求出放电截止电压对应的电流,即该温度、SOC下的峰值电流,峰值电流与截止电压的乘积即为电池的峰值功率。相关的拟合过程如图13 所示。
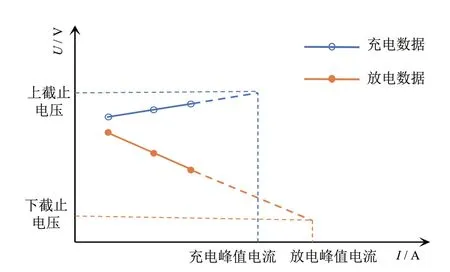
图13 JEVS 测试结果拟合过程
JEVS 测试所使用的电流变化曲线以及总端电压采集值曲线如图14 所示。基于JEVS 测得的放电过程中不同SOC下的峰值电流如表2 所示。

图14 JEVS 测试中电池电流与端电压的变化

表2 不同SOC 下充放电峰值电流
3.3.2 SOP 估计结果
将根据SOC-SOP 联合估计的方法,对电池组的峰值电流以及SOP 进行估计,并将结果与JEVS 测试值进行对比。基于并联子模组表3 给出了SOP 估计中的各类约束。

表3 并联子模组在SOP 估计中约束
图15 为电池组放电和充电10 s 峰值电流的估计值与实验测试值对比(负号表示放电工况)。测试中,电池组的初始SOC 为0.9。由图15 可知,放电峰值电流的估计几乎都处于基于电压约束控制,只有放电接近尾声时,才会转换为基于SOC 约束控制。充电峰值电流在前期接近SOC上限时基于SOC 约束控制,随着SOC下降后转换为基于电压约束控制。此外,由图15和表4 可知,SOC-SOP 联合估计算法能够较好地估计电池的放电峰值电流,其最大相对误差仅为4.54%。在估计电池的充电峰值电流中,由于SOC 为0.9 时基于SOC 约束控制,未与JEVS 测试结果对比,其最大相对误差为5.87%。

表4 充放电峰值电流估计值比较

图15 电池组放电峰值电流估计值与测试值
图16 为电池组估计SOP 与JEVS 测试值的对比。由图可知,SOP 估计值与实验测试值不仅变化趋势相同,且误差较小。实验值与估计值的平均相对误差小于3.5%。由此可知,本文所提出的SOC-SOP 联合估计算法能够较好地估计电池组SOP 随电池工作时间的变化。

图16 电池组估计SOP
4 结论
本文建立了串并联电池组的等效电路模型,并在此基础上,构建了电池组的SOC-SOP 双状态联合估计算法,将其应用于电池组的状态估计中,并同实验结果进行了对比,得到了如下结论,证明了所提出的算法具备较高的估计精度。
1) 基于并联子模组的电池组建模方法能够较好地预测电池组的状态特征,精度较高。
2) 基于并联子模组的最大可用SOC 的电池组,SOC 估计算法能较好地反应电池组内部的可用容量。此外,自适应扩展Kalmam 滤波可以精确地估计电池的荷电状态,具有较好的鲁棒性和估计精度,在所研究的工况中,SOC 估计值收敛后的最大绝对误差为2.749%,均方根误差为1.719%。
3) 结合SOC 估计,且考虑电池多约束对其SOP 的影响,使电池组SOP 算法能够精确地预测电池电流峰值,实现电池组SOP 的精确估计,SOP 估计值与JEVS 实验测试值不仅变化趋势相同,且平均相对误差小于3.5%。
猜你喜欢
中学生数理化·高一版(2019年12期)2019-12-31
电子制作(2019年12期)2019-07-16
中国交通信息化(2018年5期)2018-08-21
中国钢铁业(2018年6期)2018-07-26
电子制作(2018年8期)2018-06-26
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
电源技术(2016年9期)2016-02-27
中国钢铁业(2014年4期)2014-08-22
液晶与显示(2014年3期)2014-02-28
