基于模糊PID 的仔猪舍温度控制系统
2022-10-14 02:44阚盼盼程洪丽李雪如
智慧农业导刊 2022年19期
阚盼盼,程洪丽,李雪如
(1.济宁职业技术学院,山东 济宁 272103;2.泰安技师学院,山东 泰安 271001)
我国北方地区严寒,并且进入冬季早,冬季十分漫长,由于受低气温的影响,新生幼猪在冬季非常容易死亡或生病。因此,在新生幼猪的培育中,要十分注意良好的猪舍环境温度,以达到提升幼猪存活率的目的。对于温度控制系统而言具有大惯性和大滞等特点,传统的PID 控制策略不能达到很好的控制效果,因为其具有参数不能实时改变的缺点。针对大惯性和大滞后仔猪舍温度控制系统,模糊PID 控制算法在传统PID 算法基础上,引入模糊控制规则,以实现精确控制的目的。模糊PID 控制策略参数可随时根据系统进行调整,这样控制效果会更好。本文采用模糊控制与PID 控制相结合的模糊PID 控制策略,随时调整参数。本系统是以STM32 为核心控制器,将设计的模糊PID 控制策略,通过STM32 应用到仔猪舍温度控制系统。
1 仔猪舍温度控制系统的整体设计
本仔猪舍温度控制系统主要由控制器、LCD 显示屏、键盘、温度传感器和加热器组成。根据本系统所要实现的功能,需要1 个运行速度和控制精度都要高,并且价格便宜的控制器。STM32F103ZET6 芯片的ARM 微处理器,其具有更强劲的性能、更高的代码密度、更好的实时性、更低的成本及低功耗等众多优势,所以本文选用STM32F103Z ET6 芯片。温度传感器DS18B20 具有价格便宜,体积小,硬件开销低,抗干扰能力强,精度高的特点,出于性价比考虑采用温度传感器DS18B20。温度传感器DS18B20 将采集到的仔猪舍温度信号传送给STM32 进行温度实时监测,然后STM32 将采集到的温度与设定的温度进行比较,根据模糊PID 控制策略输出控制信号,控制加热器对系统进行加热,实现对仔猪舍温度实时监控控制。LCD 显示屏用来显示设定温度和实际温度。仔猪舍温度控制系统框图如图1 所示。
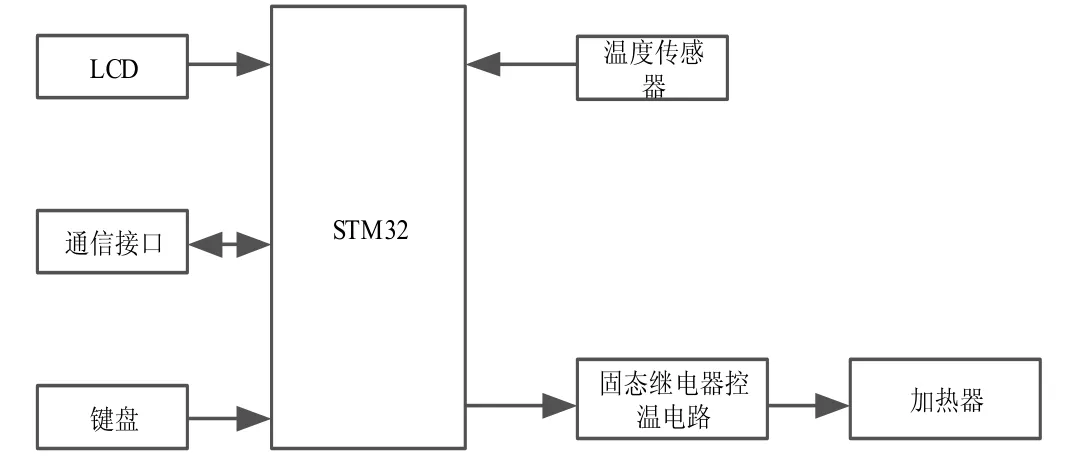
图1 仔猪舍温度控制系统框图
2 PID 控制算法
PID 控制器大约已经有1 个世纪的历史了,就是比例、积分、微分控制器在现代工业中应用非常广泛,其优点是原理简单、通用性强、鲁棒性好并且使用方便。PID 的kp、ki、kd 3 个参数决定PID 控制算法效果。比例控制用于改变信号的增益,其根据偏差信号进行控制,控制效果是使偏差变小,达到控制目的。kp 的数值对系统影响主要体现在:kp 小的时候,控制系统的调节作用慢;kp 大的时候,调节速度快,如果kp 非常大,系统会出现稳定性低和超调量过大。只有比例环节的话,是不能消除稳态误差的,所以引入了积分环节,偏差值存在时,积分控制具有减偏差的作用。当系统存在偏差时,积分控制起到作用,ki 数值决定积分控制的强弱,ki 数值越小积分控制作用越弱,ki 数值越大积分控制作用越强。微分控制对系统的动态过程中起到作用,引入微分控制可以提高控制系统的稳定性和响应速度,对稳态无影响。综合上述PID 控制策略主要表现是kp的作用是提高系统的灵敏度,系统有偏差产生时,偏差就会减小、ki 的作用是减小静态误差、kd 的作用是在偏差刚出现时及时抑制偏差减小调节时间。PID 控制原理框图如图2 所示。
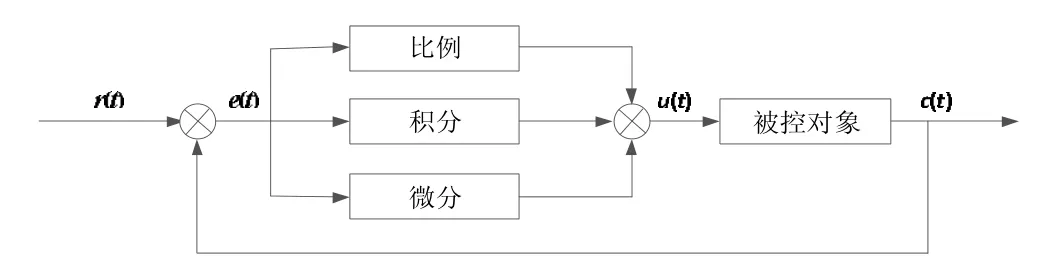
图2 PID 控制原理图
3 模糊PID 控制算法的实现
对于温度这样复杂的、多变的被控对象,如果使用传统的PID 控制策略,其中kp、ki、kd 这3 个参数是无法进行实时调整的,系统会存在一系列问题,例如:精度不足、动态性能差和震荡幅度大等缺点,达不到研究想要的效果。所谓模糊控制是指将人们的自然语言转换成计算机能识别的数字或函数,通过计算机实现控制。模糊控制的特点主要有:不依赖精准数学模型,不依赖人们的操作经验,好理解,鲁棒性好,可以很好的在计算机上实现。将模糊控制思想与传统的PID 控制算法相结合,本文利用模糊控制的方式对传统的PID 算法进行改进,设计PID 参数自整定算法,通过模糊控制来实现PID3 个参数kp、ki、kd 根据系统实时改变,从而达到控制要求。这个算法中有2 个输入分别为e 温度偏差和ec 温度偏差变化率,通过算法运算最终改变kp、ki、kd 这3 个值,达到控制要求。模糊PID结构图如图3 所示。
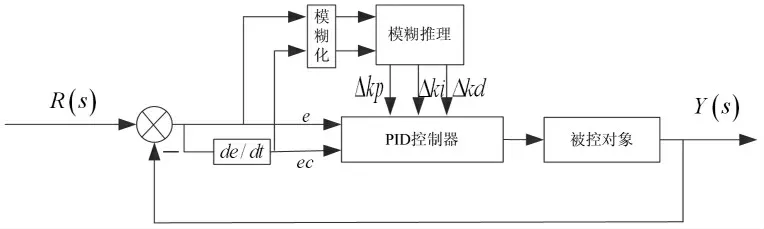
图3 模糊PID 结构图
模糊PID 控制系统设计的具体步骤主要包括:①模糊控制输入量、输出量的确定。定值与反馈值存在偏差e,然后可以运用数学公式计算出温度偏差的变化率ec。模糊控制器的输入是温度偏差和温度偏差的变化率,输出部分是为kp、ki、kd 的对应变化量。②将变量模糊化,确定本系统的隶属度函数。在设计系统的时候经常用隶属度函数有梯形和三角形型,设计选用三角形隶属度函数。设定e、ec、kp、ki、kd 的模糊论域为{-3,-2,-1,0,1,2,3},e、ec、kp、ki、kd的模糊集为{NB,NM,NS,Z,PS,PM,PB}。③对控制系统进行模糊控制规则设计。模糊推理的目的是求出kp、ki、kd 的变化量的模糊数值,利用每个模糊规则的计算公式,可以得到模糊规则(Ri)及模糊控制的总规则,进行反模糊化,计算出kp、ki、kd 的变化量的模糊控制表,最后利用公式,可以求出kp、ki、kd 的数值。
本文采用模块化的编程方法,主程序主要由初始化程序、显示屏程序、温度采集程序、模糊PID 算法程序及温度控制输出等组成,其程序结构如图4 所示。
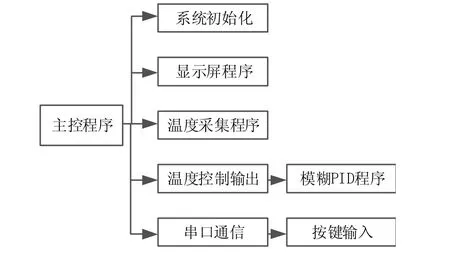
图4 程序结构图
本文STM32 控制器的控制算法使用PID 和模糊控制相结合的方式。这样的控制策略可以使kp、ki、kd 根据系统进行调节,所以使得控制效果较好。STM32 中实现模糊PID 控制采用模糊查询的方式,PID 参数在线自校正工作流程图如图5 所示。
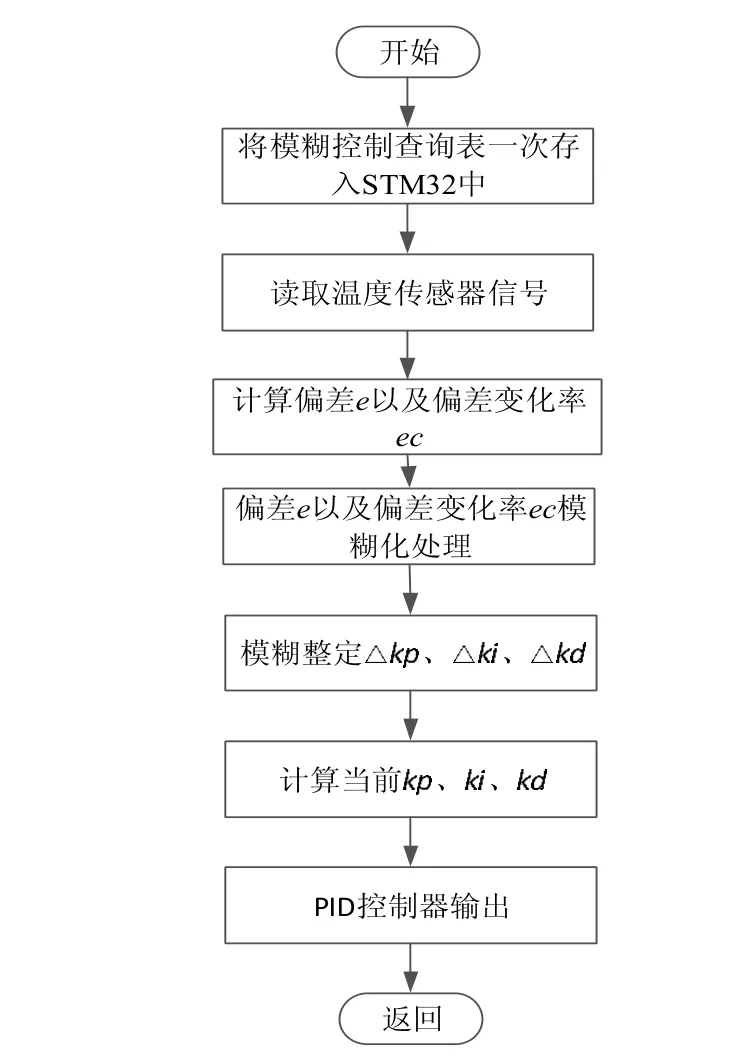
图5 PID 参数在线自校正工作流程图
在北方冬季新出生的小猪抵抗寒冷的能力差,可能造成猪生病或死亡,造成经济损失,有一个良好环节非常重要,于是本文设计了基于模糊PID 的仔猪舍温度控制系统对猪舍进行温度控制,使猪舍有一个良好的温度。在设计时了解到因仔猪舍温度控制系统具有大惯性和大滞等特点,如果采用单纯的PID 控制策略会存在一定的问题,因PID 控制策略具有参数不能实时改变的缺点,PID 控制策略不能达到很好的控制效果。
4 结束语
本文采用了模糊控制与PID 相结合,可以实时对PID 3 个参数调整。模糊PID 仔猪舍温度控制系统,可以为冬季仔猪舍提供良好的温度环境。采用模糊PID 控制策略,实现PID 控制器参数kp、ki、kd 在线实时调整,相比于传统PID,提高了系统的精度及动态性而且节约了资源,取得了满意的控制效果。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
商界评论(2022年1期)2022-04-13
汽车实用技术(2022年3期)2022-02-23
数学大王·趣味逻辑(2019年10期)2019-11-06
中国测试(2018年9期)2018-05-14
草原(2018年2期)2018-03-02
神州·中旬刊(2017年1期)2017-06-28
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
现代电子技术(2009年13期)2009-08-31