
基于变论域模糊PID控制的四轴飞行器避障分析*
2022-10-18 06:36陈家辉王亚阁陈朝大翟东丽吴涛陈业威
微处理机 2022年5期
陈家辉,王亚阁,陈朝大,翟东丽,吴涛,陈业威
(1.广东科技学院机电工程学院,东莞 523000;2.广东省机械研究所有限公司,广州 510530)
1 引言
四轴飞行器作为一类具有自主决策能力的空中机器人[1-2],近年来技术发展快速,应用越来越广泛[3-4]。在使用过程中,由于所处环境的复杂性和不确定性,常导致飞行器稳定性能差、无法精准避障等问题,有时会造成损坏,甚至危及人身安全。目前,飞行器常用的避障技术有超声波测距[5]、激光测距[6]及视觉测距[7]。然而,四轴飞行器在复杂环境中工作仅靠搭载传感器,无法使其精准避障。飞行器寻找最优避障路径[8-9]是首要解决的问题,为此必须设计更好的控制系统。张仕充[10]将深度确定性策略梯度的强化学习方法应用在四轴飞行器自主智能避障上,有效解决连续飞行空间的动作选择问题,使飞行器在障碍环境中探索出完整的避障路径;付强[11]基于视觉的扑翼飞行器避障方法能够准确识别障碍物,实现扑翼飞行器的自主避障;王家亮[12]基于贝叶斯估计与区域划分遍历的避障路径规划算法,使四轴飞行器进行避障时的实时性有所提升;王传为[13]基于改进D-S证据理论的多传感器信息融合的方法,提高四轴飞行器对障碍物识别的准确率,提高避障精度。本研究在传统PID控制的基础上设计变论域模糊PID控制系统的四轴飞行器,通过对传统PID控制改变引入伸缩因子,改变控制论域,提高控制稳定性,达到精准避障。
2 四轴飞行器路径规划
2.1 四轴飞行器模型
所设计四轴飞行器的实物如图1所示。机身设计选用“X”形,具有机动性能强、运动灵活等特点;机身箭头方向为机头前进方向。四轴飞行器有一个上升力和三个方向转矩,有六个输出分别为三个坐标轴方向的平动运动和转动运动。

图1 四轴飞行器实物图
四轴飞行器通过四个无刷电机带动螺旋桨产生升力,通过对应电机的转速控制四轴飞行器的位姿。如图2为其运动控制示意图。常规的运动方式有悬停和垂直两种,如若改变四轴飞行器电机的转速,使机体产生一个力矩,便可进一步实现四轴飞行器的俯仰、翻滚和偏航等运动。

图2 四轴飞行器运动控制示意图
2.2 四轴飞行器运动分析
在对四轴飞行器机体运动位姿进行建模时,需要建立坐标系来定义四轴飞行器在空中避障时的位姿变化。四轴飞行器在空中的运动一般可分为两种状态,第一种是把机体当作一个质点,在空中三维方向运动;第二种是由飞行器自身运动,如俯仰运动、翻滚运动和偏航运动。此处选择第二种进行运动建模。
由四轴飞行器运动控制原理可知,所设计的四轴飞行器基本运动可沿着X、Y、Z轴做平移运动和绕X、Y、Z轴进行旋转运动。图3为四轴飞行器绕欧拉角坐标变换矩阵,通过飞行器绕各轴运动阐述其在避障后位姿的矩阵变换。
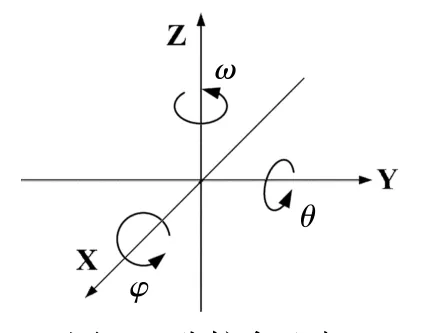
图3 欧拉角坐标
设定四轴飞行器机体绕其X轴旋转,得到横滚角φ;机体绕其Y轴旋转,得到俯仰角θ;绕其Z轴旋转,得到偏航角ω。可得四轴飞行器机体坐标转换矩阵为:

3 变论域模糊PID控制
3.1 PID控制
PID控制算法原理简单,在工程控制系统中易于实现,因此在工业领域受到广泛采用。PID控制原理如图4所示。

图4 PID控制原理图
所设计的PID控制系统分为PID控制系统和四轴飞行器两部分。PID控制器主要由比例环节、积分环节和微分环节三个部分组成,根据PID控制原理,PID控制模型为:

式中,kp为比例系数,ki为积分系数,kd为微分系数。
对式(2)采用分数阶微积分定义可得:

通过分析可知,控制系统主要对飞行器的俯仰、翻滚和偏航运动姿态进行控制,由于传统PID对四轴飞行器这样的非线性控制系统具有局限性,且在受障碍物和外界信号干扰的影响的情况下,可能会使飞行器发生失控等现象。为达到良好的避障效果,必须对传统PID控制加以改进。
3.2 变论域模糊PID控制
如图5所示为变论域模糊PID控制原理图。由于四轴飞行器是一个复杂的控制对象,尤其在避障运动时,难以精确地建立飞行器的位姿数学模型,使得传统PID控制系统无法满足四轴飞行器实际避障需求。为了解决这一问题,在传统PID控制基础上设计变论域模糊PID控制系统,进一步提高四轴飞行器控制的精度,从而提高飞行器避障精度。

图5 变论域模糊PID控制原理图
在传统PID控制系统的基础上加入模糊控制规则,通过自学习实时调整控制器中的P、I、D三个参数,提高系统的自适应能力,解决非线性模型问题。在此基础上再引入变论域思想,其原理是由于基本论域会随着飞行器避障误差变化而实时地改变论域范围;再通过引入伸缩因子使初始论域跟着对应变量的改变而实时调整,从而实现变论域模糊PID控制,提高四轴飞行器控制精度。
根据变论域模糊PID控制原理图可知,设计合适的伸缩因子是变论域模糊PID控制的关键因素,根据飞行器输入变量和输出变量的基本论域,模糊推理规则可表示为:

再以xk表示为Akm的峰值点,ym为Bm的峰值点。
根据模糊控制器的插值机理,基于上述表示的模糊推理规则可以变换为一个插值函数:

因为模糊控制器的控制精度取决于控制系统对模糊规则的数量及准确性的输入,在四轴飞行器避障后要分析输入与输出轨迹误差,就需要对初始论域进行更精细的模糊划分,因此需要改变论域的大小以提高控制精度,也就是论域可以分别随着模糊输入量的变化而自动调整。变换后的论域记为:

式中,α(xk)、β(xk)分别称作论域的伸缩因子和基于函数型伸缩因子。
为了使得控制器中初始论域随着对应变量的改变而实时调整,变论域模糊控制器控制精度的关键就在于对论域伸缩因子如何选择。为提高飞行器避障精度,本研究采用的论域伸缩因子为:

式中,λ∈(0,1),k>0,0<τ<1。而在四轴飞行器实际的模糊控制系统中,误差e和误差的变化率ec是相关联的,所以用单一变量分别调节多个系统输入论域,将对论域进行反复调节,并降低系统的收敛速度。误差e和误差的变化率ec对输入论域伸缩因子会产生影响,所以都会影响到飞行器控制系统的避障控制效果。为克服这一影响,须对论域伸缩因子进行合理设计。由于伸缩因子的取值仅与误差或误差的变化率有关,所以要在输出误差和误差变化率的基础上进行伸缩因子的选择。
3 仿真分析
为了验证四轴飞行器采用变论域模糊PID控制的避障精度,采用MATLAB仿真软件对PID控制、变论域模糊PID控制的四轴飞行器避障误差进行仿真分析,仿真时间为3s。仿真结果如图6。

图6 PID控制输出误差仿真结果对比

由图可见,当四轴飞行器采用PID控制时,超调量较大,响应时间慢,最大避障误差为0.85 mm,当四轴飞行器在有避障的环境中稳定飞行时,其飞行轨迹稳定性较差,避障误差在0.4mm上下波动;当四轴飞行器采用变论域模糊PID控制系统避障飞行时,其超调量较小,响应时间短,仅为0.5s,产生的最大避障误差为0.49mm,且快速回稳,在飞行器稳定时,其飞行稳轨迹定性较好,避障误差较小。
由于所处环境中障碍物轮廓复杂难辨,四轴飞行器在飞行中还容易受到外界干扰。对比仿真结果可知,采用传统PID控制飞行器,响应速度慢,调节时间较长,很难调整避障后的飞行位姿;而四轴飞行器采用变论域模糊PID控制时,能够有效抑制外界环境的干扰,系统响应速度快,从而降低控制系统输出误差,提高避障精度,同时还可以提高四轴飞行器追踪精度。
4 结束语
针对四轴飞行器在复杂环境中避障问题,本研究在传统PID控制算法的基础上提出一种变论域模糊PID控制系统,通过对飞行器控制进行仿真验证。所设计的四轴飞行器飞采用欧拉坐标建立运动位姿模型,在此基础上提出变论域模糊PID控制系统,在PID控制系统引入伸缩因子,改变控制系统论域,从而降低飞行器避障误差。通过MATLAB对两种控制避障仿真,证明了变论域模糊PID控制系统的可行性,为提高四轴飞行器在复杂环境抗干扰能力和精准避障提供了理论与技术基础。
猜你喜欢
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
现代信息科技(2020年22期)2020-06-24
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
计算机与数字工程(2019年8期)2019-09-03
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
