某型直升机着陆灯结构优化设计及动力学仿真
2022-10-25 12:17王林军丁仕豪刘尚武
计算机仿真 2022年9期
王林军,丁仕豪,*,刘尚武,张 东
(1. 兰州理工大学机电工程学院,甘肃 兰州 730050; 2. 兰州万里航空机电有限责任公司,甘肃 兰州 730070; 3. 兰州理工大学能源与动力工程学院,甘肃 兰州 730050)
1 引言
作为直升机的重要子系统之一,照明系统是直升机复杂气象条件下或夜间时不可缺少的条件。着陆灯作为直升机外部照明设备由于受到风阻、外部振动等载荷作用,工作环境非常恶劣。现有的着陆灯都只能单一的通过人工调节照射位置,而直升机在降落过程中飞行姿态的改变会使照射位置发生偏移,不能很好的满足降落需求。因此设计一款具有自稳功能的着陆灯具有极为重要的实际意义。
云台结构作为一种稳定防抖结构在军用武器及摄像行业被大量运用。21世纪以来,随着互联网技术和各类新型控制方法等相关领域技术的突破,云台在机器人、无人机等新兴领域也被大量应用。
通过摄像机转动云台和无人机上搭载的稳定云台结构的启发,通过引入云台来实现着陆灯的自稳调节功能。纵观国内云台生产厂家,大多数生产的云台都用于摄像机、监视器,并没有用于照明系统的云台机构。
文章依托原有着陆灯结构,在此基础上优化,通过设计一种符合技术要求的云台结构,利用CATIA进行建模,之后后通过ANSYS workbench对所设计结构进行仿真,验证结构强度是否符合设计要求以及直升机的随机振动要求。
2 着陆灯的技术要求及工作原理
2.1 技术参数要求
该着陆灯是针对某型号军用直升机所设计,考虑到其安装位置、重量要求、运动范围、稳定精度、搜索功能和新增的自稳功能等各方面因素,部分相关技术参数要求具体如表1所示。
2.2 着陆灯工作原理
收放部件工作时,收放电机工作,通过二级直齿轮、一级圆锥齿轮和四级行星齿轮组成的减速器带动在12s完成收放,并通过凸轮结构按压开关按钮来控制收放的极限位置,从而实现0~110°的收放限位。
旋转搜索时,旋转伺服电机通过减速器提高扭矩带动云台结构左右旋转,使之满足直升机以320km/h速度飞行时的风载下的旋转搜索,通过控制伺服电机转速实现旋转时间要求。灯头部分内置俯仰伺服电机在搜索到目标照明位置后与旋转伺服电机联合控制实现自稳调节功能。
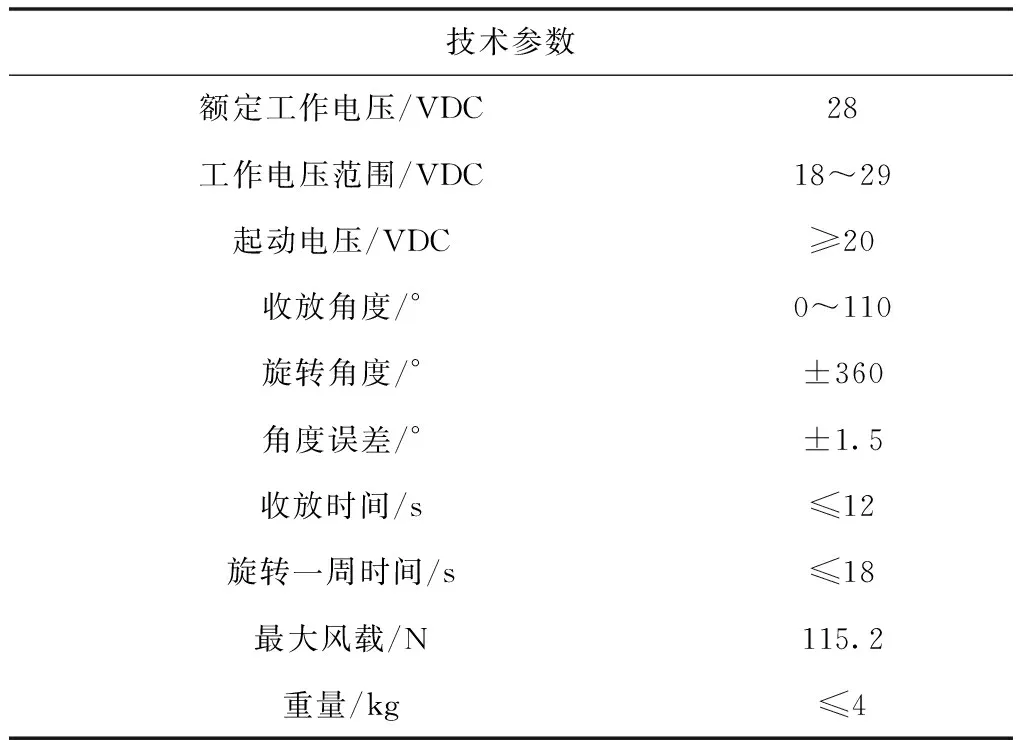
表1 技术参数表
3 着陆灯结构改进设计及三维模型的建立
改进前着陆灯主要由收放部件和旋转部件两部分构成。收放部件由直流电机通过减速器减速带动着陆灯实现收出和放回功能,同时通过凸轮结构按压开关满足收放极限位置的控制。收回极限位置时,通过底板位置安装的橡胶块挤压,满足限位和减小传动间隙的作用。由于橡胶块存在易老化、弹力有限等缺陷,效果不甚理想。旋转结构也由直流电机通过减速器减速带动灯头旋转。着陆灯灯头通过螺栓和旋转部件直连,着陆灯仅可通过旋转电机调整照射位置,不可随实际需求调节灯头俯仰角度,并且灯头会因旋转次数增加而出现松动甚至脱落现象。
改进后结构保持原有收放部件不变,将旋转部件的直流电机由伺服电机代替,同时增加云台结构。旋转输出轴控制云台结构旋转从而间接控制灯头旋转。在灯头内部添加一组控制俯仰调节的伺服电机,通过该电机实现灯头俯仰调节的需求,同时在完成搜索后可与旋转伺服电机共同控制实现自稳调节功能。在安装底板上,增加机械限位器代替原有橡胶块。
因灯头需承受较大风载,故对伺服电机输出扭矩要求较大。伺服电机输出转速可直接调节,但转速降低时输出扭矩也会随之减小,故需保持伺服电机输出转速一定,通过减速器减速,增大扭矩;除此之外,由于给定内部空间的限制,普通渐开线圆柱齿轮减速器无法实现设计要求,故此选用NGW型行星减速器。NGW型行星减速器体积小、重量轻,与普通渐开线圆柱齿轮减速器相比可缩小一倍,重量不到其一半。
经测量灯头旋转半径r=62.5mm,当直升机以320km/h的速度飞行时,着陆灯所受最大风载为F=115.2N。
由公式计算可得最大转矩T
=·=1152×0063=7.258N·m
所选伺服电机输出额定扭矩为0.18N·m,额定转速为100r/min,计算可知减速比为40.32。
根据《机械设计手册》,决定采用三级行星减速器,一级二级传动比均为4.5,三级传动比为2,总传动比为40.5,符合减速比需求。第一级和第二级太阳轮齿数为19,行星轮齿数为20,第三级太阳轮齿数为32,行星轮齿数为13,外齿圈齿数为58。设计的减速器如图1所示。

图1 三级NGW型行星减速器
考虑到整体重量问题,云台架整体采用薄壁结构,在保证强度的同时,减轻重量。灯头部分,采用偏心结构,在保证最大光源面积的同时,将俯仰伺服电机置于灯头组件内部并为光源预留下足够空间。
机械限位装置通过弹簧结构代替原有橡胶块,在底板上增加机械限位装置如图2所示。通过限位,减小因传动间隙而造成的振动对整体部件寿命的影响。

图2 后限位装置
改进后,在CATIA中完成各零件三维模型的绘制和着陆灯的装配,装配完成后着陆灯三维模型如图3所示。
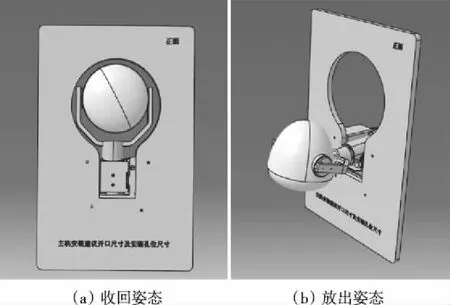
图3 着陆灯三维模型图
4 改进结构的动力学分析
4.1 材料选择及网格划分
壳体及云台等主要部件采用航空常用铝合金LY12,齿轮等关键传动部件采用40CrNiMoA合金钢,材料参数如表2所示。

表2 各项材料参数
网格划分质量会对有限元分析的精度产生影响,因此在模型导入需要对结构进行简化。把对强度影响较小的倒角等细节进行简化,可以减小网格划分难度。由于其结构复杂,因此采用四面体网格划分及六面体网格划分,网格单元尺寸设定为4mm,划分后共得到52076个节点,27583个单元,如图4所示。
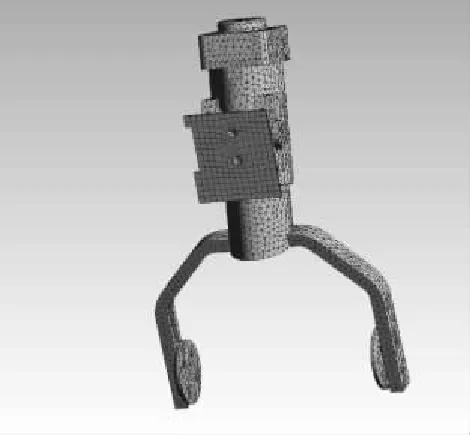
图4 改进结构网格划分图
4.2 模态分析
基于有限元方法的模态分析主要是为了计算离散结构的固有频率和振型,无限自由度离散结构的动力学方程为

(1)
式中:为离散结构的质量矩阵;为离散结构的阻尼矩阵;为离散结构的刚度矩阵;()为离散结构的激励函数向量;为离散结构的位移向量。
离散结构的固有频率是在无阻尼状态下的自由振动频率,令式(1)中和()为零,可得离散结构的无阻尼自由振动的动力学方程为

(2)
设离散结构各部位的振动为频率、相位均相同的简谐振动,即
=sin()
(3)
将式(3)代入式(2)中可得
-sin()+sin()=0
(4)
由于式(4)在任意时间下均成立,故去掉含时间项得

(5)
式中:为第阶的固有频率;为第阶的特征向量,振型形状因子。
式(5)中,第阶的特征向量有非零解的条件是

(6)
将求出的代入式(5)中,可计算出振动特征向量。
模态分析结果是检验其结构合理性、安全性的重要指标,是后续分析的基础。因随机振动试验中施加的振动谱频率范围为(10~2000)Hz,随机振动分析时固有频率要超过振动谱最大频率的1.5倍即3000Hz。通过仿真可知需要取系统前16阶模态。前 16阶模态的固有频率值如表3所示。由于主要是低阶固有频率影响系统结构,因此针对结构前6阶振动形态进行分析,并给出了前6阶振型云图,如图5所示。一二三阶振型为云台架沿Z轴左右摆动。四阶振型为云台架沿XZ面扭转。五阶振型为云台架沿XZ面扭转。六阶振型为云台架沿XZ面扭转,安装板沿X轴方向上下摆动。

表3 结构的模态参数
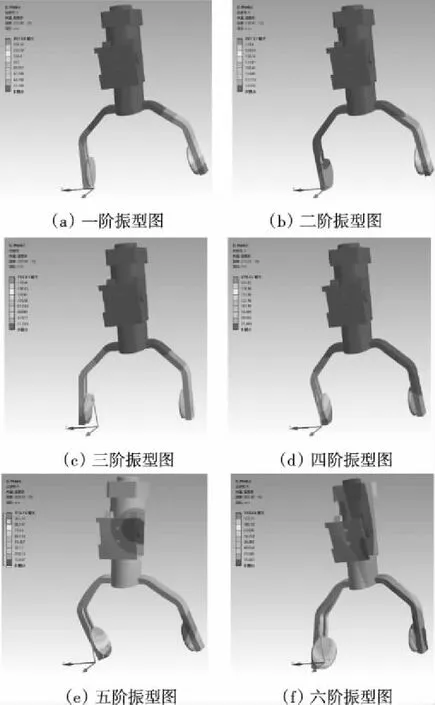
图5 云台架前六阶振型图
4.3 云台结构的随机振动分析
随机振动是一种最常见的非确定性振动形式,随机振动波形有不确定性,不可预知幅值和相位变化,只能通过统计分析方法得到过程的整体统计特征,如均值、方差、功率谱等。随机振动分析是采用功率谱密度作为输入激励以确定响应出现特征值的概率大小的频域分析方法。在工程计算中,材料的物理性质常被认为是各向同性的,物理过程通常被假定为线性、平稳,各态历经以及满足高斯分布类型。
4.3.1 振动输入边界条件的确定
直升机平台振动特性是在低水平带宽随机振动背景上叠加很强的主导正弦(Sine-on-Random,SOR)。主导正弦是由旋转器件(主要是旋翼、尾桨和发动机传动轴等)产生的。着陆灯所适配直升机混合振动试验激励谱图,如图6所示。

图6 振动试验谱图
其中,(=1,2,3,4)代表主轴旋翼频率及其倍频,其具体数值及对应的正弦振动加速度峰值,如表4所示。直升机平台的SOR型振动谱线,其中正弦定频振动部分属于谐响应范畴,带宽随机振动部分属于随机振动范畴,但是目前ANSYS不能够处理这种混合振动模式的模块,谱线无法同时施加在有限元模型上。对此,需要采用近似简化的方法,将SOR谱线转化成优选元模型可接受的边界条件。

表4 振动试验条件
在将正弦定频振动与带宽随机振动的能量转化为一种振动峰值的过程中,需要先确定哪一个是主要分量。确定后将次要分量
转化为等效的主要分量,进行叠加。图7所示的谱线中随机分量是主要分量。根据能量相等这一原则,将型振动谱线中的正弦定频振动转化为窄带随机振动分量,原振动谱型也由型振动谱线变为谱线(,)。谱线转化方法,如式(7)、式(8)及式(9)所示。
(7)

(8)
(9)
式中:G(f)—等效的随机振动功率谱密度;A(f)—正弦分量;Q(f)—品质因数;β—等效因子,一般取1.8;f进行等效转换的振动频率。
根据上述公式,对给定的 SOR 谱线,需先得知结构品质因数Q(f)。结构品质因数在产品研发阶段通常与材料特性和该产品的结构有关。结构品质因数的精确数值需经实验测定,它的经确度将直接影响谱线的幅值和带宽。因为着陆灯设计完成后需要满足国军标规定的随机振动试验,因此采用基于试验的谱线转化方法。谱线中正弦定频信号理论上没有带宽,但振动控制器中正弦定频信号有实际宽度。正弦定频信号的宽度和数据分析的频率分辨率带宽相同,且幅值随着分析带宽的变窄而增大。根据式(1),转换后的谱线,如图7所示。

图7 转化后的宽带叠加窄带随机振动谱图
432 随机振动响应结果及分析
根据国军标中振动试验的相关规定,设备应该在三个互相正交轴的每一轴向进行分析。沿结构的、、三个方向分别施加的振动谱线,如图8所示。仿真计算时选取3区间条件下的应力为分析结果。结果显示、、三个正交方向的最大等效应力发生在方向上,如表5所示。
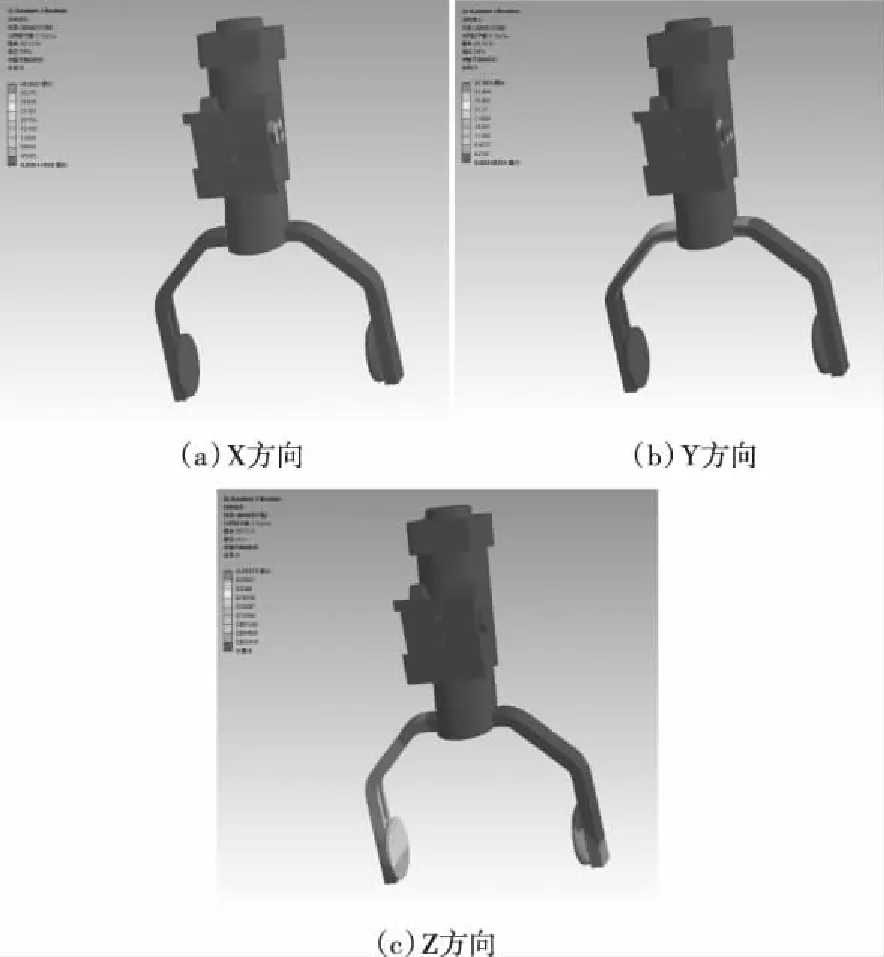
图8 3σ等效应力云图
从表5可以看出,该部件在方向上激励对其结构破坏最大,方向激励下的3等效应力分布图,如图8所示。相应的最大应力为42278,发生在壳体固定端面,远小于材料12的屈服强度270,结构剩余强度系数为638。在云台架顶部安装板旁设置测点,其响应曲线如图9所示,在20526频率左右时出现峰值,该频率下测点最大应力为42278。图9中各个波动发生区域均在结构模型的各阶固有频率附近。文章所设计的结构动态特性较好,在直升机激励环境下仍能满足技术要求。

表5 三个轴向最大 3σ应力响应值

图9 响应PSD图
5 结论
文章基于原有着陆灯结构优化设计了一种新型着陆灯结构。通过对优化后结构的模型进行动力学分析,得到如下结论:
1)改进后结构解决了原有结构灯头松动、限位装置易老化的问题,改善了搜索功能,并实现了自稳调节功能。
2)基于的固有模态分析和随机振动仿真分析,发现向振动下结构的响应最大,最大等效应力为47278,结构剩余强度系数638,说明结构在随机振动环境下具有良好的强度。
猜你喜欢
氯碱工业(2022年3期)2022-07-04
天津诗人(2021年1期)2021-11-12
发明与创新·中学生(2020年1期)2020-08-03
科技视界(2019年23期)2019-09-28
科学与财富(2019年24期)2019-08-06
汽车维修技师(2017年6期)2017-11-18
摄影之友(2016年12期)2017-02-27
摄影之友(2016年12期)2017-02-27
三联生活周刊(2016年35期)2016-08-29
燕山大学学报(2015年4期)2015-12-25